Structured Graph Network for Constrained Robot Crowd Navigation with Low Fidelity Simulation
2405.16830
0
0
Abstract
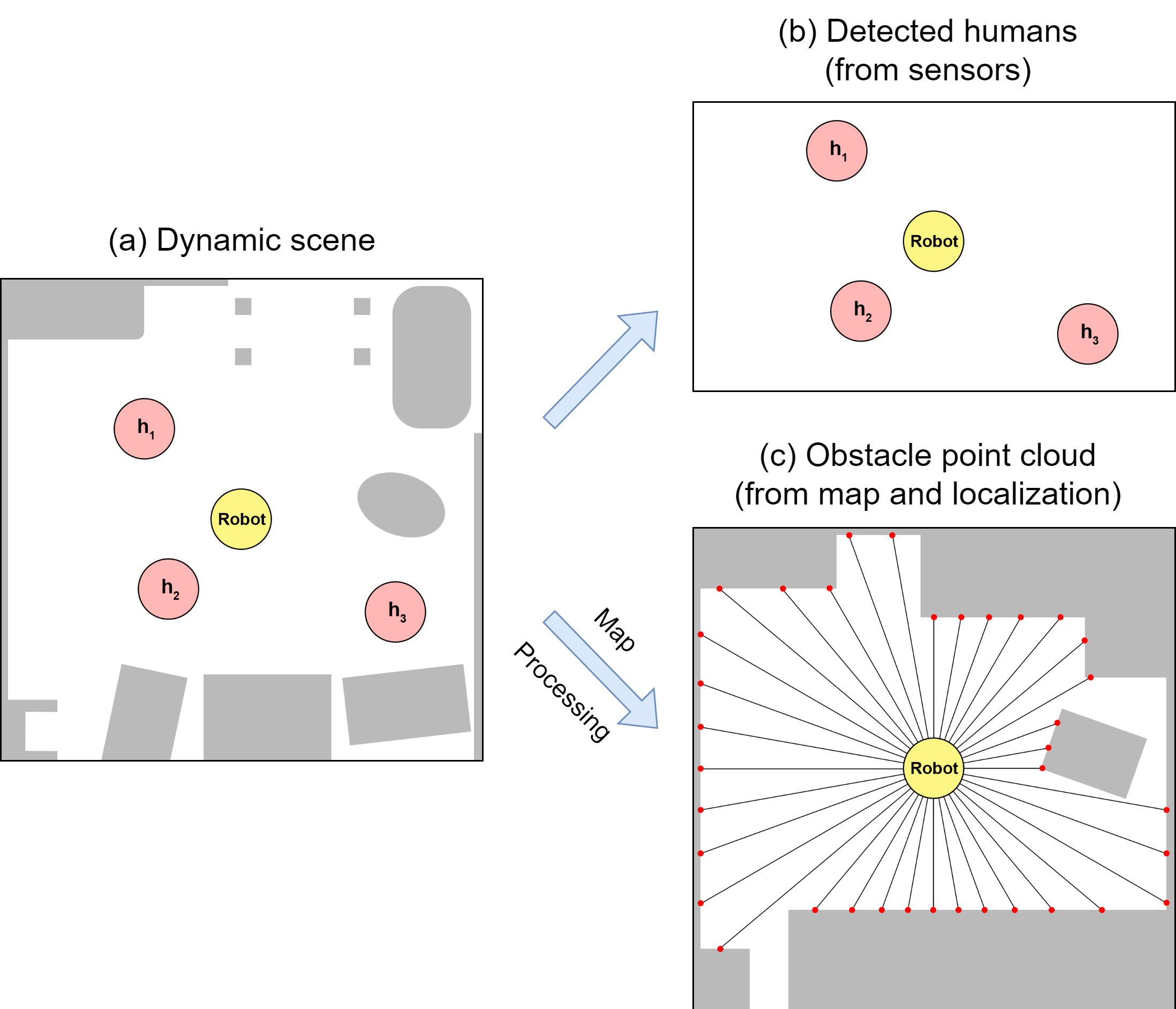
We investigate the feasibility of deploying reinforcement learning (RL) policies for constrained crowd navigation using a low-fidelity simulator. We introduce a representation of the dynamic environment, separating human and obstacle representations. Humans are represented through detected states, while obstacles are represented as computed point clouds based on maps and robot localization. This representation enables RL policies trained in a low-fidelity simulator to deploy in real world with a reduced sim2real gap. Additionally, we propose a spatio-temporal graph to model the interactions between agents and obstacles. Based on the graph, we use attention mechanisms to capture the robot-human, human-human, and human-obstacle interactions. Our method significantly improves navigation performance in both simulated and real-world environments. Video demonstrations can be found at https://sites.google.com/view/constrained-crowdnav/home.
Create account to get full access
Overview
- This paper presents a novel approach called Structured Graph Network (SGN) for enabling constrained robot navigation in crowded environments.
- The authors use a low-fidelity simulation environment to train their model, which they claim reduces the need for high-quality simulation data or real-world training.
- The key idea is to represent the environment and agents as a structured graph network, which allows the model to capture the complex spatial and social interactions in the scene.
Plain English Explanation
The paper introduces a new way for robots to navigate through crowded spaces, such as a busy city street or a packed airport. Traditionally, robots have had a hard time figuring out how to move around safely when there are lots of people and obstacles in the way. The researchers developed a technique called Structured Graph Network (SGN) that helps the robot understand the layout of the environment and the movements of the people around it.
Instead of trying to create a highly detailed simulation of the real world, which can be very time-consuming and expensive, the researchers used a simpler, lower-quality simulation to train their model. This "low-fidelity" simulation is faster and easier to generate, but it still captures the essential elements needed for the robot to learn how to navigate.
The key innovation is that the SGN model represents the environment and the people in it as a structured graph. This allows the robot to see the complex relationships and interactions between different elements, like how people are moving and where obstacles are located. By understanding these spatial and social cues, the robot can plan a path that avoids collisions and gets to its destination efficiently.
Link to paper on learning strategies for successful crowd navigation
Link to paper on uncertainty-aware DRL for autonomous vehicle crowd navigation
Technical Explanation
The Structured Graph Network (SGN) proposed in this paper is a novel approach for enabling constrained robot navigation in crowded environments. The core idea is to represent the environment and agents as a structured graph network, which allows the model to capture the complex spatial and social interactions in the scene.
The authors use a low-fidelity simulation environment to train their SGN model, which they claim reduces the need for high-quality simulation data or real-world training. The simulation provides a simplified representation of the environment, including the static obstacles and dynamic agents (i.e., people). Despite the low-fidelity nature of the simulation, the authors show that their SGN model can effectively transfer the learned navigation skills to real-world scenarios.
The SGN architecture consists of several key components:
- Spatial Encoder: This module encodes the static elements of the environment, such as walls and obstacles, into a spatial feature representation.
- Social Encoder: This module encodes the dynamic agents (people) and their interactions into a social feature representation.
- Graph Neural Network: The spatial and social feature representations are then fed into a Graph Neural Network, which can capture the complex relationships between the different elements in the scene.
- Planner: Finally, the output of the Graph Neural Network is used by a planner module to generate a collision-free trajectory for the robot to follow.
Through extensive experiments in both simulated and real-world environments, the authors demonstrate that their SGN model outperforms several baseline approaches in terms of navigation performance and efficiency.
Link to paper on multi-robot cooperative socially-aware navigation
Link to paper on socially adaptive path planning based on generative adversarial networks
Critical Analysis
The Structured Graph Network (SGN) approach presented in this paper is a promising step forward in enabling robots to navigate crowded environments effectively. By using a low-fidelity simulation for training, the authors have demonstrated that their model can generalize well to real-world scenarios without the need for expensive and time-consuming high-fidelity simulations or extensive real-world data collection.
However, the paper does not fully address the potential limitations and challenges of this approach. For example, the authors do not discuss how the SGN model would handle highly dynamic or unpredictable agent behaviors, such as sudden changes in direction or unexpected movements. Additionally, the paper does not explore the scalability of the approach as the number of agents in the environment increases, which could be a crucial factor in real-world deployment.
Furthermore, the authors do not provide a detailed analysis of the computational complexity and runtime performance of the SGN model, which could be an important consideration for real-time navigation tasks.
Link to paper on SHINE: Social Homology Identification for Navigation in Crowded Environments
Conclusion
The Structured Graph Network (SGN) proposed in this paper represents a promising approach for enabling robots to navigate crowded environments effectively. By using a low-fidelity simulation for training, the authors have demonstrated that their model can generalize well to real-world scenarios without the need for extensive data collection or high-fidelity simulations.
The key innovation of the SGN is its ability to capture the complex spatial and social interactions in the scene through a structured graph representation. This allows the robot to plan collision-free trajectories that account for the dynamic movements of people and obstacles in the environment.
While the paper presents promising results, further research is needed to address the potential limitations and challenges of this approach, such as handling highly dynamic agent behaviors and assessing the scalability and computational performance of the model. Nonetheless, the Structured Graph Network is a significant step forward in the field of robot navigation in crowded environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Learning Strategies For Successful Crowd Navigation
Rajshree Daulatabad, Serena Nath
0
0
Teaching autonomous mobile robots to successfully navigate human crowds is a challenging task. Not only does it require planning, but it requires maintaining social norms which may differ from one context to another. Here we focus on crowd navigation, using a neural network to learn specific strategies in-situ with a robot. This allows us to take into account human behavior and reactions toward a real robot as well as learn strategies that are specific to various scenarios in that context. A CNN takes a top-down image of the scene as input and outputs the next action for the robot to take in terms of speed and angle. Here we present the method, experimental results, and quantitatively evaluate our approach.
4/11/2024

Uncertainty-Aware DRL for Autonomous Vehicle Crowd Navigation in Shared Space
Mahsa Golchoubian, Moojan Ghafurian, Kerstin Dautenhahn, Nasser Lashgarian Azad
0
0
Safe, socially compliant, and efficient navigation of low-speed autonomous vehicles (AVs) in pedestrian-rich environments necessitates considering pedestrians' future positions and interactions with the vehicle and others. Despite the inevitable uncertainties associated with pedestrians' predicted trajectories due to their unobserved states (e.g., intent), existing deep reinforcement learning (DRL) algorithms for crowd navigation often neglect these uncertainties when using predicted trajectories to guide policy learning. This omission limits the usability of predictions when diverging from ground truth. This work introduces an integrated prediction and planning approach that incorporates the uncertainties of predicted pedestrian states in the training of a model-free DRL algorithm. A novel reward function encourages the AV to respect pedestrians' personal space, decrease speed during close approaches, and minimize the collision probability with their predicted paths. Unlike previous DRL methods, our model, designed for AV operation in crowded spaces, is trained in a novel simulation environment that reflects realistic pedestrian behaviour in a shared space with vehicles. Results show a 40% decrease in collision rate and a 15% increase in minimum distance to pedestrians compared to the state of the art model that does not account for prediction uncertainty. Additionally, the approach outperforms model predictive control methods that incorporate the same prediction uncertainties in terms of both performance and computational time, while producing trajectories closer to human drivers in similar scenarios.
5/24/2024

Multi-Robot Cooperative Socially-Aware Navigation Using Multi-Agent Reinforcement Learning
Weizheng Wang, Le Mao, Ruiqi Wang, Byung-Cheol Min
0
0
In public spaces shared with humans, ensuring multi-robot systems navigate without collisions while respecting social norms is challenging, particularly with limited communication. Although current robot social navigation techniques leverage advances in reinforcement learning and deep learning, they frequently overlook robot dynamics in simulations, leading to a simulation-to-reality gap. In this paper, we bridge this gap by presenting a new multi-robot social navigation environment crafted using Dec-POSMDP and multi-agent reinforcement learning. Furthermore, we introduce SAMARL: a novel benchmark for cooperative multi-robot social navigation. SAMARL employs a unique spatial-temporal transformer combined with multi-agent reinforcement learning. This approach effectively captures the complex interactions between robots and humans, thus promoting cooperative tendencies in multi-robot systems. Our extensive experiments reveal that SAMARL outperforms existing baseline and ablation models in our designed environment. Demo videos for this work can be found at: https://sites.google.com/view/samarl
5/17/2024
🌐
Socially Adaptive Path Planning Based on Generative Adversarial Network
Yao Wang, Yuqi Kong, Wenzheng Chi, Lining Sun
0
0
The natural interaction between robots and pedestrians in the process of autonomous navigation is crucial for the intelligent development of mobile robots, which requires robots to fully consider social rules and guarantee the psychological comfort of pedestrians. Among the research results in the field of robotic path planning, the learning-based socially adaptive algorithms have performed well in some specific human-robot interaction environments. However, human-robot interaction scenarios are diverse and constantly changing in daily life, and the generalization of robot socially adaptive path planning remains to be further investigated. In order to address this issue, this work proposes a new socially adaptive path planning algorithm by combining the generative adversarial network (GAN) with the Optimal Rapidly-exploring Random Tree (RRT*) navigation algorithm. Firstly, a GAN model with strong generalization performance is proposed to adapt the navigation algorithm to more scenarios. Secondly, a GAN model based Optimal Rapidly-exploring Random Tree navigation algorithm (GAN-RRT*) is proposed to generate paths in human-robot interaction environments. Finally, we propose a socially adaptive path planning framework named GAN-RTIRL, which combines the GAN model with Rapidly-exploring random Trees Inverse Reinforcement Learning (RTIRL) to improve the homotopy rate between planned and demonstration paths. In the GAN-RTIRL framework, the GAN-RRT* path planner can update the GAN model from the demonstration path. In this way, the robot can generate more anthropomorphic paths in human-robot interaction environments and has stronger generalization in more complex environments. Experimental results reveal that our proposed method can effectively improve the anthropomorphic degree of robot motion planning and the homotopy rate between planned and demonstration paths.
4/30/2024