Explore and Explain: Self-supervised Navigation and Recounting
2007.07268
0
0
🌿
Abstract
Embodied AI has been recently gaining attention as it aims to foster the development of autonomous and intelligent agents. In this paper, we devise a novel embodied setting in which an agent needs to explore a previously unknown environment while recounting what it sees during the path. In this context, the agent needs to navigate the environment driven by an exploration goal, select proper moments for description, and output natural language descriptions of relevant objects and scenes. Our model integrates a novel self-supervised exploration module with penalty, and a fully-attentive captioning model for explanation. Also, we investigate different policies for selecting proper moments for explanation, driven by information coming from both the environment and the navigation. Experiments are conducted on photorealistic environments from the Matterport3D dataset and investigate the navigation and explanation capabilities of the agent as well as the role of their interactions.
Create account to get full access
Overview
- This paper explores a novel "embodied AI" setting where an agent must explore an unknown environment and provide natural language descriptions of relevant objects and scenes along the way.
- The agent needs to balance exploration goals with the ability to select appropriate moments to provide explanations.
- The model integrates a self-supervised exploration module with a captioning model for generating the explanations.
- Experiments are conducted in photorealistic virtual environments to assess the agent's navigation and explanation capabilities.
Plain English Explanation
The paper looks at a new way of developing [object Object]. Instead of a robot or AI simply following instructions, the goal is for the agent to independently explore an unfamiliar environment and describe what it sees along the way.
Imagine a robot that's sent into a building it's never been in before. As it moves around, trying to figure out the layout, it also needs to narrate its experiences - pointing out interesting objects, describing the rooms, etc. This allows the robot to not only navigate successfully, but also communicate its discoveries in natural language.
To achieve this, the researchers combined two key capabilities:
- Exploration: An algorithm that helps the robot efficiently explore the unknown environment, driven by a goal of finding new and interesting areas.
- Captioning: A language model that can generate coherent descriptions of the scenes and objects the robot observes.
The researchers tested this setup in realistic virtual environments, measuring how well the robot could navigate while also providing useful explanations of what it was seeing. This helps advance the field of [object Object], where the goal is to create autonomous agents that can physically interact with and reason about the world around them.
Technical Explanation
The paper proposes a novel "embodied" setting where an agent must explore an unknown environment while also generating natural language descriptions of relevant objects and scenes encountered along the way.
The key components of the agent's architecture are:
- Exploration Module: A self-supervised module that drives the agent's navigation, with the goal of efficiently exploring the environment and discovering new areas.
- Captioning Model: A fully-attentive language model that generates descriptive captions for the agent's observations.
The exploration module uses a form of [object Object] to encourage the agent to visit novel locations and avoid revisiting areas. Meanwhile, the captioning model attends to both the visual inputs and the agent's trajectory to produce coherent natural language descriptions.
The paper also investigates different policies for determining when the agent should pause its exploration to provide a description. These policies are driven by information from both the environment and the agent's navigation progress.
Experiments are conducted in [object Object] from the Matterport3D dataset. The results assess the agent's navigation efficiency, description quality, and the interplay between these two capabilities.
Critical Analysis
The paper presents a compelling vision for [object Object] that can autonomously explore and describe their surroundings. However, the experiments are limited to simulated environments, and it's unclear how well the approach would scale to more complex, real-world scenarios.
Additionally, the paper does not address potential safety or ethical concerns that could arise from deploying such agents in the physical world. There may be privacy implications, as the agents would be generating detailed descriptions of private spaces and objects.
Further research is needed to understand the limitations of the exploration and captioning models, and to develop safeguards to ensure the agents behave in a responsible and trustworthy manner. Exploring [object Object] could also help address these concerns.
Conclusion
This paper introduces a novel embodied AI setting where an agent must simultaneously explore an unknown environment and provide natural language descriptions of the scenes and objects it encounters. The proposed model integrates a self-supervised exploration module with a captioning system to achieve this dual objective.
The experiments demonstrate the potential of this approach, but also highlight the need for further research to address safety and scalability concerns. As the field of embodied AI continues to advance, it will be crucial to develop agents that can interact with the physical world in a responsible and trustworthy manner.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
Embodied Agents for Efficient Exploration and Smart Scene Description
Roberto Bigazzi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
0
0
The development of embodied agents that can communicate with humans in natural language has gained increasing interest over the last years, as it facilitates the diffusion of robotic platforms in human-populated environments. As a step towards this objective, in this work, we tackle a setting for visual navigation in which an autonomous agent needs to explore and map an unseen indoor environment while portraying interesting scenes with natural language descriptions. To this end, we propose and evaluate an approach that combines recent advances in visual robotic exploration and image captioning on images generated through agent-environment interaction. Our approach can generate smart scene descriptions that maximize semantic knowledge of the environment and avoid repetitions. Further, such descriptions offer user-understandable insights into the robot's representation of the environment by highlighting the prominent objects and the correlation between them as encountered during the exploration. To quantitatively assess the performance of the proposed approach, we also devise a specific score that takes into account both exploration and description skills. The experiments carried out on both photorealistic simulated environments and real-world ones demonstrate that our approach can effectively describe the robot's point of view during exploration, improving the human-friendly interpretability of its observations.
4/16/2024
Self-Explainable Affordance Learning with Embodied Caption
Zhipeng Zhang, Zhimin Wei, Guolei Sun, Peng Wang, Luc Van Gool
0
0
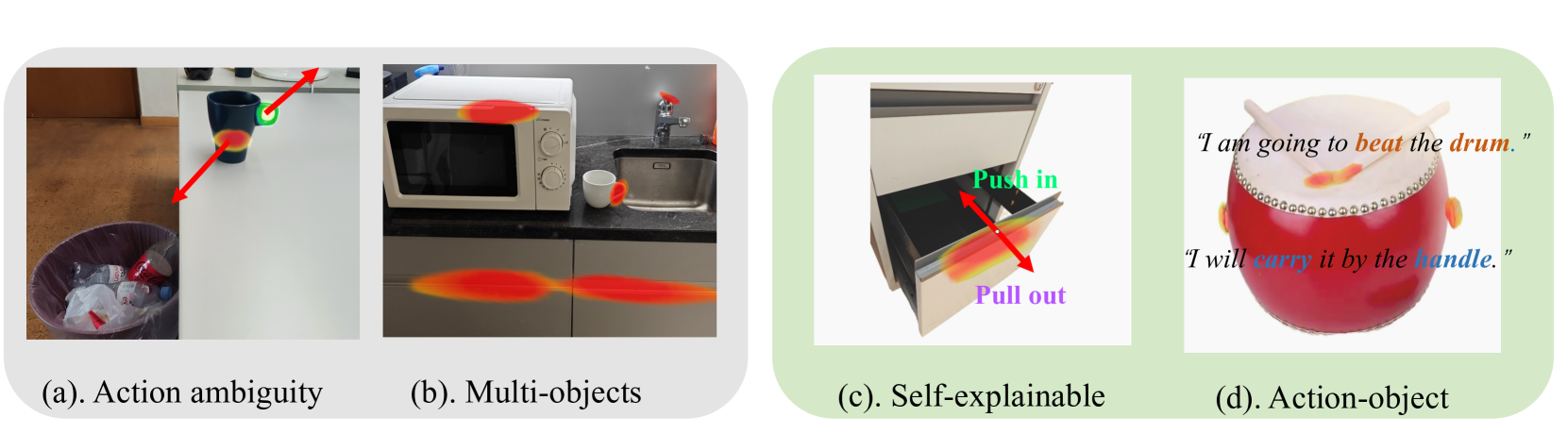
In the field of visual affordance learning, previous methods mainly used abundant images or videos that delineate human behavior patterns to identify action possibility regions for object manipulation, with a variety of applications in robotic tasks. However, they encounter a main challenge of action ambiguity, illustrated by the vagueness like whether to beat or carry a drum, and the complexities involved in processing intricate scenes. Moreover, it is important for human intervention to rectify robot errors in time. To address these issues, we introduce Self-Explainable Affordance learning (SEA) with embodied caption. This innovation enables robots to articulate their intentions and bridge the gap between explainable vision-language caption and visual affordance learning. Due to a lack of appropriate dataset, we unveil a pioneering dataset and metrics tailored for this task, which integrates images, heatmaps, and embodied captions. Furthermore, we propose a novel model to effectively combine affordance grounding with self-explanation in a simple but efficient manner. Extensive quantitative and qualitative experiments demonstrate our method's effectiveness.
4/9/2024
👁️
Spot the Difference: A Novel Task for Embodied Agents in Changing Environments
Federico Landi, Roberto Bigazzi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
0
0
Embodied AI is a recent research area that aims at creating intelligent agents that can move and operate inside an environment. Existing approaches in this field demand the agents to act in completely new and unexplored scenes. However, this setting is far from realistic use cases that instead require executing multiple tasks in the same environment. Even if the environment changes over time, the agent could still count on its global knowledge about the scene while trying to adapt its internal representation to the current state of the environment. To make a step towards this setting, we propose Spot the Difference: a novel task for Embodied AI where the agent has access to an outdated map of the environment and needs to recover the correct layout in a fixed time budget. To this end, we collect a new dataset of occupancy maps starting from existing datasets of 3D spaces and generating a number of possible layouts for a single environment. This dataset can be employed in the popular Habitat simulator and is fully compliant with existing methods that employ reconstructed occupancy maps during navigation. Furthermore, we propose an exploration policy that can take advantage of previous knowledge of the environment and identify changes in the scene faster and more effectively than existing agents. Experimental results show that the proposed architecture outperforms existing state-of-the-art models for exploration on this new setting.
4/16/2024

Embodied Instruction Following in Unknown Environments
Zhenyu Wu, Ziwei Wang, Xiuwei Xu, Jiwen Lu, Haibin Yan
0
0
Enabling embodied agents to complete complex human instructions from natural language is crucial to autonomous systems in household services. Conventional methods can only accomplish human instructions in the known environment where all interactive objects are provided to the embodied agent, and directly deploying the existing approaches for the unknown environment usually generates infeasible plans that manipulate non-existing objects. On the contrary, we propose an embodied instruction following (EIF) method for complex tasks in the unknown environment, where the agent efficiently explores the unknown environment to generate feasible plans with existing objects to accomplish abstract instructions. Specifically, we build a hierarchical embodied instruction following framework including the high-level task planner and the low-level exploration controller with multimodal large language models. We then construct a semantic representation map of the scene with dynamic region attention to demonstrate the known visual clues, where the goal of task planning and scene exploration is aligned for human instruction. For the task planner, we generate the feasible step-by-step plans for human goal accomplishment according to the task completion process and the known visual clues. For the exploration controller, the optimal navigation or object interaction policy is predicted based on the generated step-wise plans and the known visual clues. The experimental results demonstrate that our method can achieve 45.09% success rate in 204 complex human instructions such as making breakfast and tidying rooms in large house-level scenes.
6/18/2024