Self-Explainable Affordance Learning with Embodied Caption
2404.05603
0
0
Abstract
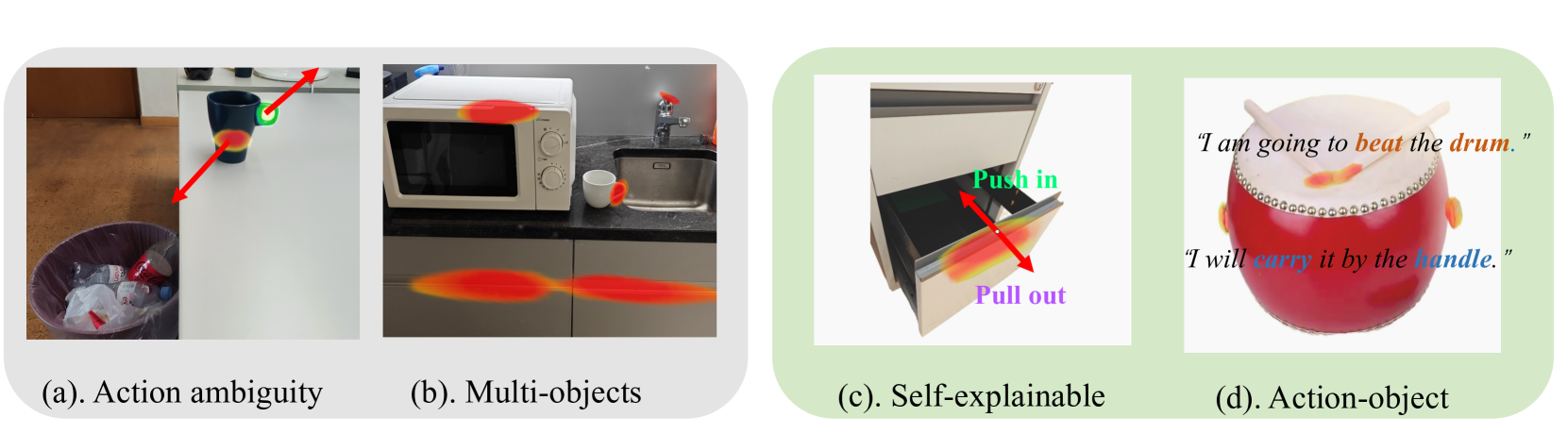
In the field of visual affordance learning, previous methods mainly used abundant images or videos that delineate human behavior patterns to identify action possibility regions for object manipulation, with a variety of applications in robotic tasks. However, they encounter a main challenge of action ambiguity, illustrated by the vagueness like whether to beat or carry a drum, and the complexities involved in processing intricate scenes. Moreover, it is important for human intervention to rectify robot errors in time. To address these issues, we introduce Self-Explainable Affordance learning (SEA) with embodied caption. This innovation enables robots to articulate their intentions and bridge the gap between explainable vision-language caption and visual affordance learning. Due to a lack of appropriate dataset, we unveil a pioneering dataset and metrics tailored for this task, which integrates images, heatmaps, and embodied captions. Furthermore, we propose a novel model to effectively combine affordance grounding with self-explanation in a simple but efficient manner. Extensive quantitative and qualitative experiments demonstrate our method's effectiveness.
Create account to get full access
Overview
- This research paper explores a novel approach to visual affordance learning, where an agent can learn about the actionable properties of objects in an embodied, self-explanatory manner.
- The key idea is to leverage embodied captions - natural language descriptions of actions performed on objects - to guide the agent's learning process and enable it to explain its affordance understanding.
- The authors present a framework that combines text-driven affordance learning, embodied AI, and multimodal variational autoencoders to achieve this self-explanatory affordance learning capability.
Plain English Explanation
The paper describes a system that allows a robot or AI agent to learn about the actionable properties of objects, and then explain what it has learned in a way that humans can understand. The key insight is to have the agent learn from natural language descriptions of actions performed on objects, rather than just relying on visual information alone.
For example, imagine a robot that is learning about a cup. Instead of just looking at the cup and trying to figure out what it can do with it, the robot also gets a description like "I picked up the cup and drank from it." This embodied caption provides valuable information about the cup's affordances - the fact that it can be grasped and used to contain liquid.
By combining this language-based learning with techniques like variational autoencoders, the system can not only learn effectively, but also generate explanations that a human can understand. So the robot could say something like "I know the cup can be grasped and used to hold liquid because the caption described someone picking it up and drinking from it."
This self-explanatory affordance learning is powerful because it allows the agent to build an interpretable understanding of the world, rather than just a black box model. It also has applications in areas like robotic manipulation, where the agent needs to reason about and communicate the actionable properties of objects.
Technical Explanation
The paper presents a framework for self-explainable affordance learning that leverages embodied captions - natural language descriptions of actions performed on objects - to guide the learning process. The key components are:
-
Text-Driven Affordance Learning: The agent learns about object affordances by grounding the embodied captions in visual observations, as described in this related work.
-
Embodied AI: The agent learns in an embodied setting, interacting with objects and performing actions, as explored in this prior research.
-
Multimodal Variational Autoencoders (MVAE): The framework uses MVAE models, which can learn joint representations of vision, language, and actions, as shown in this relevant work.
By combining these elements, the system can not only learn about object affordances, but also generate self-explanatory representations that describe what the agent has learned in natural language, as inspired by this work on self-explaining AI.
The authors evaluate their approach on a novel dataset of annotated egocentric videos with embodied captions, demonstrating that the agent can effectively learn and explain its affordance understanding.
Critical Analysis
The paper presents a compelling and well-designed approach to the challenge of enabling AI agents to learn and communicate their understanding of object affordances. The use of embodied captions as a learning signal is a clever and promising idea, as it allows the agent to ground its knowledge in real-world interactions and descriptions.
However, the authors acknowledge several limitations and areas for future work. For example, the current dataset is relatively small and focused on a limited set of objects and actions. Scaling the approach to more complex and diverse environments will likely require larger and richer training datasets.
Additionally, the self-explanatory capabilities of the agent are still relatively constrained, as the generated explanations are tied to the specific language used in the embodied captions. Developing more flexible and generalizable explanation generation, perhaps drawing on advances in language models and reasoning, could further enhance the interpretability and usefulness of the system.
Overall, this research represents an important step towards building AI systems that can not only learn about the world in an embodied way, but also communicate their understanding in a clear and self-explanatory manner. As the field of embodied AI continues to evolve, approaches like the one presented in this paper will be crucial for developing agents that can effectively interact with and collaborate with humans.
Conclusion
This paper presents a novel framework for self-explainable affordance learning, which allows an AI agent to learn about the actionable properties of objects through embodied interactions and natural language descriptions. By combining techniques from text-driven affordance learning, embodied AI, and multimodal variational autoencoders, the system can not only learn effectively, but also generate natural language explanations of its affordance understanding.
This self-explanatory capability is a significant advancement in the field of embodied AI, as it allows agents to build interpretable models of the world and communicate their knowledge to human users. The approach has promising applications in areas like robotic manipulation, where the agent needs to reason about and convey the actionable properties of objects. As the authors demonstrate, this research represents an important step towards developing AI systems that can learn, understand, and explain their interactions with the physical environment.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Text-driven Affordance Learning from Egocentric Vision
Tomoya Yoshida, Shuhei Kurita, Taichi Nishimura, Shinsuke Mori
0
0
Visual affordance learning is a key component for robots to understand how to interact with objects. Conventional approaches in this field rely on pre-defined objects and actions, falling short of capturing diverse interactions in realworld scenarios. The key idea of our approach is employing textual instruction, targeting various affordances for a wide range of objects. This approach covers both hand-object and tool-object interactions. We introduce text-driven affordance learning, aiming to learn contact points and manipulation trajectories from an egocentric view following textual instruction. In our task, contact points are represented as heatmaps, and the manipulation trajectory as sequences of coordinates that incorporate both linear and rotational movements for various manipulations. However, when we gather data for this task, manual annotations of these diverse interactions are costly. To this end, we propose a pseudo dataset creation pipeline and build a large pseudo-training dataset: TextAFF80K, consisting of over 80K instances of the contact points, trajectories, images, and text tuples. We extend existing referring expression comprehension models for our task, and experimental results show that our approach robustly handles multiple affordances, serving as a new standard for affordance learning in real-world scenarios.
4/4/2024
🌿
Explore and Explain: Self-supervised Navigation and Recounting
Roberto Bigazzi, Federico Landi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
0
0
Embodied AI has been recently gaining attention as it aims to foster the development of autonomous and intelligent agents. In this paper, we devise a novel embodied setting in which an agent needs to explore a previously unknown environment while recounting what it sees during the path. In this context, the agent needs to navigate the environment driven by an exploration goal, select proper moments for description, and output natural language descriptions of relevant objects and scenes. Our model integrates a novel self-supervised exploration module with penalty, and a fully-attentive captioning model for explanation. Also, we investigate different policies for selecting proper moments for explanation, driven by information coming from both the environment and the navigation. Experiments are conducted on photorealistic environments from the Matterport3D dataset and investigate the navigation and explanation capabilities of the agent as well as the role of their interactions.
4/16/2024

RAIL: Robot Affordance Imagination with Large Language Models
Ceng Zhang, Xin Meng, Dongchen Qi, Gregory S. Chirikjian
0
0
This paper introduces an automatic affordance reasoning paradigm tailored to minimal semantic inputs, addressing the critical challenges of classifying and manipulating unseen classes of objects in household settings. Inspired by human cognitive processes, our method integrates generative language models and physics-based simulators to foster analytical thinking and creative imagination of novel affordances. Structured with a tripartite framework consisting of analysis, imagination, and evaluation, our system analyzes the requested affordance names into interaction-based definitions, imagines the virtual scenarios, and evaluates the object affordance. If an object is recognized as possessing the requested affordance, our method also predicts the optimal pose for such functionality, and how a potential user can interact with it. Tuned on only a few synthetic examples across 3 affordance classes, our pipeline achieves a very high success rate on affordance classification and functional pose prediction of 8 classes of novel objects, outperforming learning-based baselines. Validation through real robot manipulating experiments demonstrates the practical applicability of the imagined user interaction, showcasing the system's ability to independently conceptualize unseen affordances and interact with new objects and scenarios in everyday settings.
6/10/2024
🔄
Embodied Agents for Efficient Exploration and Smart Scene Description
Roberto Bigazzi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
0
0
The development of embodied agents that can communicate with humans in natural language has gained increasing interest over the last years, as it facilitates the diffusion of robotic platforms in human-populated environments. As a step towards this objective, in this work, we tackle a setting for visual navigation in which an autonomous agent needs to explore and map an unseen indoor environment while portraying interesting scenes with natural language descriptions. To this end, we propose and evaluate an approach that combines recent advances in visual robotic exploration and image captioning on images generated through agent-environment interaction. Our approach can generate smart scene descriptions that maximize semantic knowledge of the environment and avoid repetitions. Further, such descriptions offer user-understandable insights into the robot's representation of the environment by highlighting the prominent objects and the correlation between them as encountered during the exploration. To quantitatively assess the performance of the proposed approach, we also devise a specific score that takes into account both exploration and description skills. The experiments carried out on both photorealistic simulated environments and real-world ones demonstrate that our approach can effectively describe the robot's point of view during exploration, improving the human-friendly interpretability of its observations.
4/16/2024