Exploring Camera Encoder Designs for Autonomous Driving Perception

0

Sign in to get full access
Overview
- This paper explores different camera encoder designs for autonomous driving perception systems.
- The researchers investigate various encoder architectures and their impact on the performance of object detection and segmentation tasks.
- The paper provides insights into the trade-offs between encoder complexity, computational cost, and perception accuracy in the context of autonomous driving applications.
Plain English Explanation
The paper focuses on the camera encoder, which is a critical component in autonomous driving systems. The camera encoder takes raw camera images as input and extracts useful features that can be used for tasks like object detection and lane segmentation. The researchers explored different encoder designs to understand how the complexity and computational requirements of the encoder impact the overall performance of the perception system.
For example, they looked at how simpler encoder architectures, like those used in HENet or TedNet, perform compared to more complex models. The goal was to find the right balance between encoder complexity, cost, and the accuracy of the perception tasks, which are crucial for safe autonomous driving.
The researchers also examined how the encoder design choices affect the performance of specific perception tasks, such as object detection and lane segmentation, which are essential for autonomous vehicles to navigate the road safely. By understanding these trade-offs, the researchers aim to provide guidance for designing efficient and effective camera encoders for autonomous driving applications.
Technical Explanation
The paper begins by reviewing related work in the field of camera encoder designs for autonomous driving perception, including hardware accelerators, LaneSegNet, and other encoder-decoder architectures like HENet and TedNet.
The researchers then present their experimental setup, where they evaluate different encoder designs on object detection and lane segmentation tasks. The encoder architectures range from simple convolutional neural networks (CNNs) to more complex models like ResNet and EfficientNet. The paper analyzes the trade-offs between encoder complexity, computational cost, and perception accuracy, providing insights into the optimal design choices for autonomous driving applications.
The results show that while more complex encoders generally achieve higher accuracy, simpler models can still perform well, especially when computational resources are limited. The researchers also find that the encoder design has a more significant impact on object detection performance compared to lane segmentation.
Critical Analysis
The paper provides a comprehensive exploration of camera encoder designs for autonomous driving perception, but it does not delve into some potential limitations and areas for further research. For instance, the paper focuses on standard perception tasks like object detection and lane segmentation, but it does not consider more advanced capabilities, such as semantic understanding of the driving environment or end-to-end driving policy learning, which may require different encoder architectures.
Additionally, the paper does not address the potential impact of sensor fusion or the integration of the camera encoder with other perception modalities, such as LiDAR or radar, which could further improve the overall performance of the autonomous driving system. Exploring these aspects could be an interesting direction for future research.
Conclusion
This paper offers valuable insights into the design of camera encoders for autonomous driving perception systems. By examining the trade-offs between encoder complexity, computational cost, and perception accuracy, the researchers provide guidance for optimizing encoder architectures to meet the stringent requirements of autonomous driving applications. The findings can inform the development of efficient and effective perception systems, ultimately contributing to the advancement of autonomous vehicle technology and its safe deployment on public roads.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Exploring Camera Encoder Designs for Autonomous Driving Perception
Barath Lakshmanan, Joshua Chen, Shiyi Lan, Maying Shen, Zhiding Yu, Jose M. Alvarez
The cornerstone of autonomous vehicles (AV) is a solid perception system, where camera encoders play a crucial role. Existing works usually leverage pre-trained Convolutional Neural Networks (CNN) or Vision Transformers (ViTs) designed for general vision tasks, such as image classification, segmentation, and 2D detection. Although those well-known architectures have achieved state-of-the-art accuracy in AV-related tasks, e.g., 3D Object Detection, there remains significant potential for improvement in network design due to the nuanced complexities of industrial-level AV dataset. Moreover, existing public AV benchmarks usually contain insufficient data, which might lead to inaccurate evaluation of those architectures.To reveal the AV-specific model insights, we start from a standard general-purpose encoder, ConvNeXt and progressively transform the design. We adjust different design parameters including width and depth of the model, stage compute ratio, attention mechanisms, and input resolution, supported by systematic analysis to each modifications. This customization yields an architecture optimized for AV camera encoder achieving 8.79% mAP improvement over the baseline. We believe our effort could become a sweet cookbook of image encoders for AV and pave the way to the next-level drive system.
Read more7/11/2024

0
New!Human Insights Driven Latent Space for Different Driving Perspectives: A Unified Encoder for Efficient Multi-Task Inference
Huy-Dung Nguyen, Anass Bairouk, Mirjana Maras, Wei Xiao, Tsun-Hsuan Wang, Patrick Chareyre, Ramin Hasani, Marc Blanchon, Daniela Rus
Autonomous driving holds great potential to transform road safety and traffic efficiency by minimizing human error and reducing congestion. A key challenge in realizing this potential is the accurate estimation of steering angles, which is essential for effective vehicle navigation and control. Recent breakthroughs in deep learning have made it possible to estimate steering angles directly from raw camera inputs. However, the limited available navigation data can hinder optimal feature learning, impacting the system's performance in complex driving scenarios. In this paper, we propose a shared encoder trained on multiple computer vision tasks critical for urban navigation, such as depth, pose, and 3D scene flow estimation, as well as semantic, instance, panoptic, and motion segmentation. By incorporating diverse visual information used by humans during navigation, this unified encoder might enhance steering angle estimation. To achieve effective multi-task learning within a single encoder, we introduce a multi-scale feature network for pose estimation to improve depth learning. Additionally, we employ knowledge distillation from a multi-backbone model pretrained on these navigation tasks to stabilize training and boost performance. Our findings demonstrate that a shared backbone trained on diverse visual tasks is capable of providing overall perception capabilities. While our performance in steering angle estimation is comparable to existing methods, the integration of human-like perception through multi-task learning holds significant potential for advancing autonomous driving systems. More details and the pretrained model are available at https://hi-computervision.github.io/uni-encoder/.
Read more9/17/2024
💬
0
Hardware Accelerators for Autonomous Cars: A Review
Ruba Islayem, Fatima Alhosani, Raghad Hashem, Afra Alzaabi, Mahmoud Meribout
Autonomous Vehicles (AVs) redefine transportation with sophisticated technology, integrating sensors, cameras, and intricate algorithms. Implementing machine learning in AV perception demands robust hardware accelerators to achieve real-time performance at reasonable power consumption and footprint. Lot of research and development efforts using different technologies are still being conducted to achieve the goal of getting a fully AV and some cars manufactures offer commercially available systems. Unfortunately, they still lack reliability because of the repeated accidents they have encountered such as the recent one which happened in California and for which the Cruise company had its license suspended by the state of California for an undetermined period [1]. This paper critically reviews the most recent findings of machine vision systems used in AVs from both hardware and algorithmic points of view. It discusses the technologies used in commercial cars with their pros and cons and suggests possible ways forward. Thus, the paper can be a tangible reference for researchers who have the opportunity to get involved in designing machine vision systems targeting AV
Read more5/2/2024
0
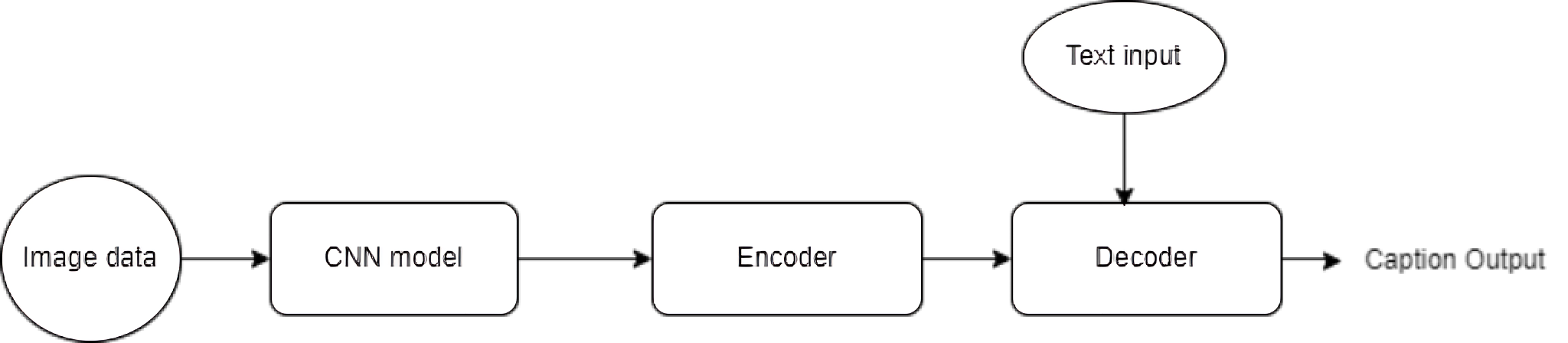
Compressed Image Captioning using CNN-based Encoder-Decoder Framework
Md Alif Rahman Ridoy, M Mahmud Hasan, Shovon Bhowmick
In today's world, image processing plays a crucial role across various fields, from scientific research to industrial applications. But one particularly exciting application is image captioning. The potential impact of effective image captioning is vast. It can significantly boost the accuracy of search engines, making it easier to find relevant information. Moreover, it can greatly enhance accessibility for visually impaired individuals, providing them with a more immersive experience of digital content. However, despite its promise, image captioning presents several challenges. One major hurdle is extracting meaningful visual information from images and transforming it into coherent language. This requires bridging the gap between the visual and linguistic domains, a task that demands sophisticated algorithms and models. Our project is focused on addressing these challenges by developing an automatic image captioning architecture that combines the strengths of convolutional neural networks (CNNs) and encoder-decoder models. The CNN model is used to extract the visual features from images, and later, with the help of the encoder-decoder framework, captions are generated. We also did a performance comparison where we delved into the realm of pre-trained CNN models, experimenting with multiple architectures to understand their performance variations. In our quest for optimization, we also explored the integration of frequency regularization techniques to compress the AlexNet and EfficientNetB0 model. We aimed to see if this compressed model could maintain its effectiveness in generating image captions while being more resource-efficient.
Read more4/30/2024