Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE

0

Sign in to get full access
Overview
- This paper presents a fast and decentralized state estimation framework for legged robot locomotion, which combines the Extended Kalman Filter (EKF) and Moving Horizon Estimation (MHE) techniques.
- The proposed approach enables efficient state estimation on resource-constrained embedded platforms, supporting real-time applications like robot control and navigation.
- The authors demonstrate the effectiveness of their method through simulations and experiments on a quadruped robot platform.
Plain English Explanation
The paper describes a new way to help legged robots, like four-legged robots, understand their own position and movement in the world around them. This is an important ability for robots to have so they can move around safely and perform tasks effectively.
The researchers developed a system that combines two common techniques, the Extended Kalman Filter and Moving Horizon Estimation, to quickly and efficiently estimate the robot's state (position, orientation, speed, etc.) using data from the robot's sensors. This decentralized approach allows the estimation to be done on the robot itself, rather than relying on a central computer.
The key advantage of this system is that it can run in real-time on the robot's limited on-board computers, enabling the robot to navigate and respond quickly to its environment. The researchers tested their method through simulations and experiments on a four-legged robot, showing that it can accurately track the robot's state while running efficiently.
Technical Explanation
The paper presents a fast and decentralized state estimation framework for legged robot locomotion that combines the Extended Kalman Filter (EKF) and Moving Horizon Estimation (MHE) techniques.
The EKF is used to recursively estimate the robot's state (position, orientation, velocity, etc.) from noisy sensor measurements, such as those from inertial measurement units (IMUs) and joint encoders. The MHE component is then employed to correct any drift or error accumulation in the EKF estimates by optimizing over a short window of past states and measurements.
This decentralized approach allows the state estimation to be performed on-board the robot, without requiring a centralized computing system. This is important for real-time applications like robot control and navigation, where the robot needs to react quickly to its environment.
The authors demonstrate the effectiveness of their method through simulations and experiments on a quadruped robot platform. They show that their combined EKF-MHE framework can accurately track the robot's state while running efficiently on the robot's embedded hardware.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed state estimation framework. The authors comprehensively compare their approach to alternative methods, such as using the EKF or MHE alone, and demonstrate its superior performance in terms of accuracy and computational efficiency.
One potential limitation of the approach is its reliance on accurate knowledge of the robot's kinematic and dynamic models. If these models are not well-calibrated or the robot's parameters change over time (e.g., due to wear and tear), the state estimation may degrade. The authors acknowledge this issue and suggest that incorporating system identification techniques could help address it.
Additionally, the paper focuses on state estimation for a single robot, but many practical applications involve teams of cooperating robots. Extending the proposed framework to distributed multi-robot state estimation could be an interesting area for future research.
Conclusion
This paper presents a novel and efficient state estimation framework for legged robot locomotion that combines the strengths of the Extended Kalman Filter and Moving Horizon Estimation. By leveraging a decentralized architecture, the proposed approach can run in real-time on the robot's embedded hardware, enabling fast and accurate state tracking to support applications like robot control and navigation.
The thorough evaluation and promising results suggest that this work represents a significant advancement in the field of state estimation for legged robots. As the use of legged robots continues to grow in various domains, such as search and rescue, planetary exploration, and personal assistance, this type of efficient and reliable state estimation will become increasingly important for enabling robust and agile robot locomotion.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE
Jiarong Kang, Yi Wang, Xiaobin Xiong
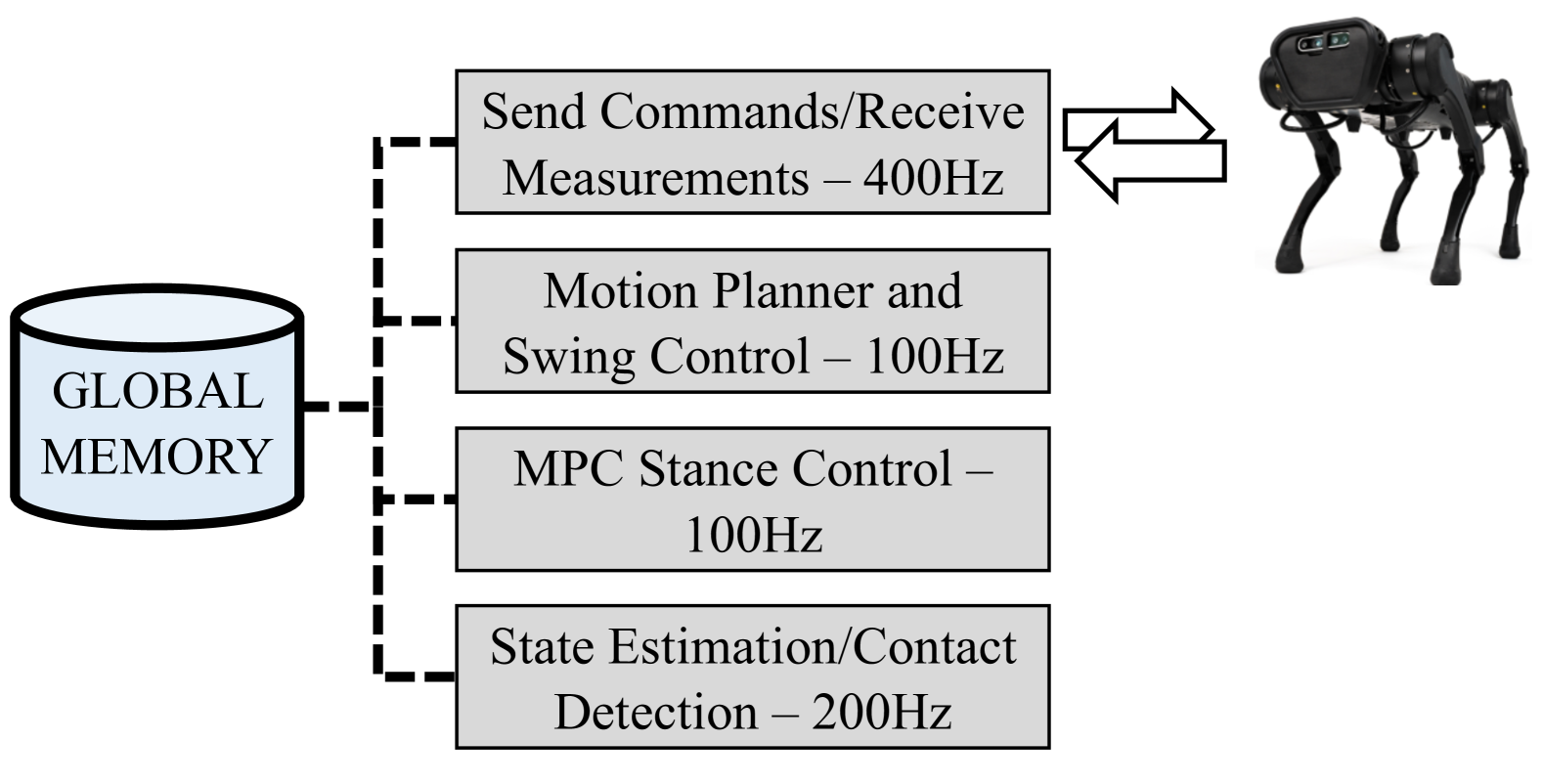
In this paper, we present a fast and decentralized state estimation framework for the control of legged locomotion. The nonlinear estimation of the floating base states is decentralized to an orientation estimation via Extended Kalman Filter (EKF) and a linear velocity estimation via Moving Horizon Estimation (MHE). The EKF fuses the inertia sensor with vision to estimate the floating base orientation. The MHE uses the estimated orientation with all the sensors within a time window in the past to estimate the linear velocities based on a time-varying linear dynamics formulation of the interested states with state constraints. More importantly, a marginalization method based on the optimization structure of the full information filter (FIF) is proposed to convert the equality-constrained FIF to an equivalent MHE. This decoupling of state estimation promotes the desired balance of computation efficiency, accuracy of estimation, and the inclusion of state constraints. The proposed method is shown to be capable of providing accurate state estimation to several legged robots, including the highly dynamic hopping robot PogoX, the bipedal robot Cassie, and the quadrupedal robot Unitree Go1, with a frequency at 200 Hz and a window interval of 0.1s.
Read more9/6/2024

0
Optimized Kalman Filter based State Estimation and Height Control in Hopping Robots
Samuel Burns, Matthew Woodward
Quadrotor-based multimodal hopping and flying locomotion significantly improves efficiency and operation time as compared to purely flying systems. However, effective control necessitates continuous estimation of the vertical states. A single hopping state estimator has been shown (Kang 2024), in which two vertical states (position, acceleration) are measured and only velocity is estimated using a moving horizon estimation and visual inertial odometry at 200 Hz. This technique requires complex sensors (IMU, lidar, depth camera, contact force sensor), and computationally intensive calculations (12-core, 5 GHz processor), for a maximum hop height of $sim$0.6 m at 3.65 kg. Here we show a trained Kalman filter based hopping vertical state estimator (HVSE), requiring only vertical acceleration measurements. Our results show the HVSE can estimate more states (position, velocity) with a mean-absolute-error in the hop apex ratio (height error/ground truth) of 12.5%, running $sim$4.2x faster (840 Hz) on a substantially less powerful processor (dual-core 240 MHz) with over $sim$6.7x the hopping height (4.02 m) at 20% of the mass (672 g). The presented general HVSE, and training procedure are broadly applicable to jumping, hopping, and legged robots across a wide range of sizes and hopping heights.
Read more8/23/2024

0
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Alexander Schperberg, Yusuke Tanaka, Saviz Mowlavi, Feng Xu, Bharathan Balaji, Dennis Hong
State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
Read more4/30/2024
0
Simultaneous State Estimation and Contact Detection for Legged Robots by Multiple-Model Kalman Filtering
Marcel Menner, Karl Berntorp
This paper proposes an algorithm for combined contact detection and state estimation for legged robots. The proposed algorithm models the robot's movement as a switched system, in which different modes relate to different feet being in contact with the ground. The key element in the proposed algorithm is an interacting multiple-model Kalman filter, which identifies the currently-active mode defining contacts, while estimating the state. The rationale for the proposed estimation framework is that contacts (and contact forces) impact the robot's state and vice versa. This paper presents validation studies with a quadruped using (i) the high-fidelity simulator Gazebo for a comparison with ground truth values and a baseline estimator, and (ii) hardware experiments with the Unitree A1 robot. The simulation study shows that the proposed algorithm outperforms the baseline estimator, which does not simultaneous detect contacts. The hardware experiments showcase the applicability of the proposed algorithm and highlights the ability to detect contacts.
Read more4/5/2024