Simultaneous State Estimation and Contact Detection for Legged Robots by Multiple-Model Kalman Filtering
2404.03444
0
0
Abstract
This paper proposes an algorithm for combined contact detection and state estimation for legged robots. The proposed algorithm models the robot's movement as a switched system, in which different modes relate to different feet being in contact with the ground. The key element in the proposed algorithm is an interacting multiple-model Kalman filter, which identifies the currently-active mode defining contacts, while estimating the state. The rationale for the proposed estimation framework is that contacts (and contact forces) impact the robot's state and vice versa. This paper presents validation studies with a quadruped using (i) the high-fidelity simulator Gazebo for a comparison with ground truth values and a baseline estimator, and (ii) hardware experiments with the Unitree A1 robot. The simulation study shows that the proposed algorithm outperforms the baseline estimator, which does not simultaneous detect contacts. The hardware experiments showcase the applicability of the proposed algorithm and highlights the ability to detect contacts.
Create account to get full access
Overview
- This paper presents a novel approach for simultaneous state estimation and contact detection for legged robots using a multiple-model Kalman filtering technique.
- The proposed algorithm can accurately detect when a robot's foot makes contact with the ground and estimate the robot's state (position, velocity, etc.) during both contact and non-contact phases.
- The method is demonstrated through simulations and experiments on a quadruped robot, showing improvements over existing approaches.
Plain English Explanation
Legged robots, like four-legged robots, need to be able to accurately estimate their position, speed, and other important information (their "state") as they move around. They also need to be able to detect when their feet touch the ground, as this contact information is crucial for controlling the robot's movements.
The researchers in this paper developed a new algorithm that can do both of these things at the same time. Their "multiple-model Kalman filtering" technique uses a set of mathematical models to track the robot's state during both the times when its feet are touching the ground and when they are not. This allows the algorithm to quickly detect when foot contact occurs and also provide an accurate estimate of the robot's overall state.
The team tested their approach through computer simulations and experiments with a real four-legged robot. They found that their method outperformed existing techniques, providing better state estimation and more reliable contact detection. This could lead to more stable and capable legged robots that can navigate challenging environments more effectively.
Technical Explanation
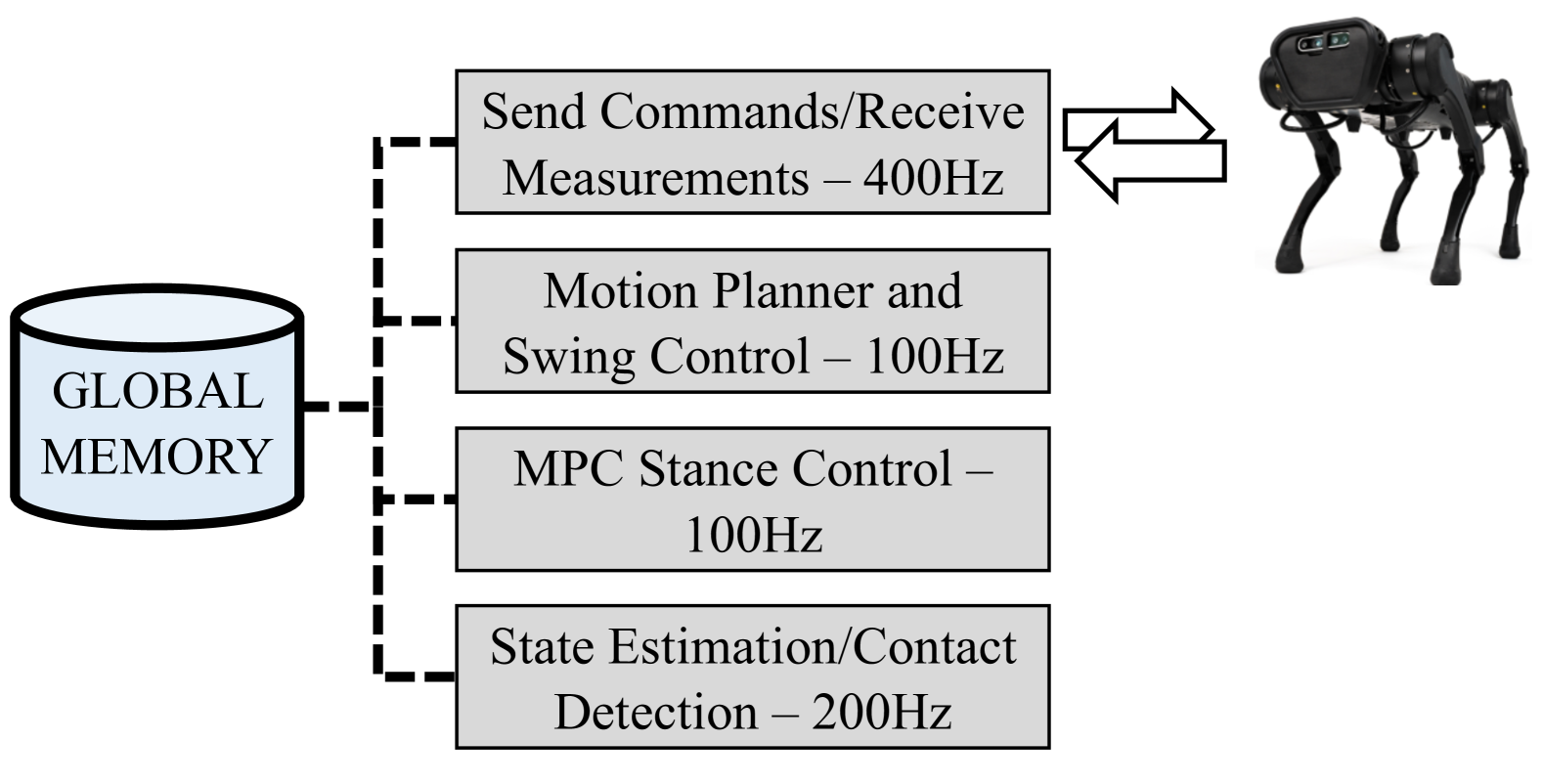
The paper presents a multiple-model Kalman filtering approach for simultaneous state estimation and contact detection in legged robots. The key idea is to maintain a set of Kalman filters, each corresponding to a different contact state (foot in contact or not in contact), and to dynamically switch between these filters based on the sensor measurements.
The authors develop a detailed state-space model that captures the robot's dynamics during both contact and non-contact phases. This model is then used to derive the multiple Kalman filters, which are run in parallel to estimate the robot's state (position, velocity, etc.) and detect when foot contact occurs.
The performance of the proposed algorithm is evaluated through both simulations and experiments on a quadruped robot. The results show that the multiple-model approach outperforms a single-model Kalman filter, particularly in terms of contact detection accuracy and state estimation during contact transitions.
The authors also discuss the computational complexity of their method and strategies for efficient implementation, as well as potential extensions to handle more complex contact scenarios, such as slipping or multi-contact situations.
Critical Analysis
The paper presents a well-designed and thorough approach to the important problem of simultaneous state estimation and contact detection for legged robots. The multiple-model Kalman filtering technique is a principled and theoretically sound solution that is supported by both simulation and experimental results.
One potential limitation is that the method assumes a priori knowledge of the robot's dynamics and contact models, which may not always be available in practice. The authors acknowledge this and suggest incorporating learning-based techniques to adapt the models online.
Additionally, the experiments were conducted on a single quadruped robot platform, and it would be valuable to see the approach evaluated on a wider range of legged robot hardware and environments to assess its broader applicability and robustness.
Overall, this paper makes a significant contribution to the field of legged robot state estimation and control, and the proposed multiple-model Kalman filtering framework could serve as a useful foundation for further research in this area.
Conclusion
This paper presents a novel algorithm for simultaneous state estimation and contact detection in legged robots using a multiple-model Kalman filtering approach. The method demonstrates improved performance over existing techniques, particularly in terms of accurate detection of foot contact events and reliable state estimation during both contact and non-contact phases.
The research showcases the potential of advanced estimation and control techniques to enable more capable and robust legged robot locomotion, which could have important implications for applications in difficult terrains, disaster response, and beyond. Further development and validation of this approach on a wider range of platforms and environments would be valuable for advancing the state of the art in legged robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Alexander Schperberg, Yusuke Tanaka, Saviz Mowlavi, Feng Xu, Bharathan Balaji, Dennis Hong
0
0
State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
4/30/2024

The Kinetics Observer: A Tightly Coupled Estimator for Legged Robots
Arnaud Demont (CNRS-AIST JRL, LISV), Mehdi Benallegue (CNRS-AIST JRL), Abdelaziz Benallegue (LISV, UVSQ), Pierre Gergondet (CNRS-AIST JRL), Antonin Dallard (LIRMM), Rafael Cisneros (CNRS-AIST JRL), Masaki Murooka (CNRS-AIST JRL), Fumio Kanehiro (CNRS-AIST JRL)
0
0
In this paper, we propose the Kinetics Observer, a novel estimator addressing the challenge of state estimation for legged robots using proprioceptive sensors (encoders, IMU and force/torque sensors). Based on a Multiplicative Extended Kalman Filter, the Kinetics Observer allows the real-time simultaneous estimation of contact and perturbation forces, and of the robot's kinematics, which are accurate enough to perform proprioceptive odometry. Thanks to a visco-elastic model of the contacts linking their kinematics to the ones of the centroid of the robot, the Kinetics Observer ensures a tight coupling between the whole-body kinematics and dynamics of the robot. This coupling entails a redundancy of the measurements that enhances the robustness and the accuracy of the estimation. This estimator was tested on two humanoid robots performing long distance walking on even terrain and non-coplanar multi-contact locomotion.
6/21/2024

Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE
Jiarong Kang, Yi Wang, Xiaobin Xiong
0
0
In this paper, we present a fast and decentralized state estimation framework for the control of legged locomotion. The nonlinear estimation of the floating base states is decentralized to an orientation estimation via Extended Kalman Filter (EKF) and a linear velocity estimation via Moving Horizon Estimation (MHE). The EKF fuses the inertia sensor with vision to estimate the floating base orientation. The MHE uses the estimated orientation with all the sensors within a time window in the past to estimate the linear velocities based on a time-varying linear dynamics formulation of the interested states with state constraints. More importantly, a marginalization method based on the optimization structure of the full information filter (FIF) is proposed to convert the equality-constrained FIF to an equivalent MHE. This decoupling of state estimation promotes the desired balance of computation efficiency, accuracy of estimation, and the inclusion of state constraints. The proposed method is shown to be capable of providing accurate state estimation to several legged robots, including the highly dynamic hopping robot PogoX, the bipedal robot Cassie, and the quadrupedal robot Unitree Go1, with a frequency at 200 Hz and a window interval of 0.1s.
6/3/2024
LIKO: LiDAR, Inertial, and Kinematic Odometry for Bipedal Robots
Qingrui Zhao, Mingyuan Li, Yongliang Shi, Xuechao Chen, Zhangguo Yu, Lianqiang Han, Zhenyuan Fu, Jintao Zhang, Chao Li, Yuanxi Zhang, Qiang Huang
0
0
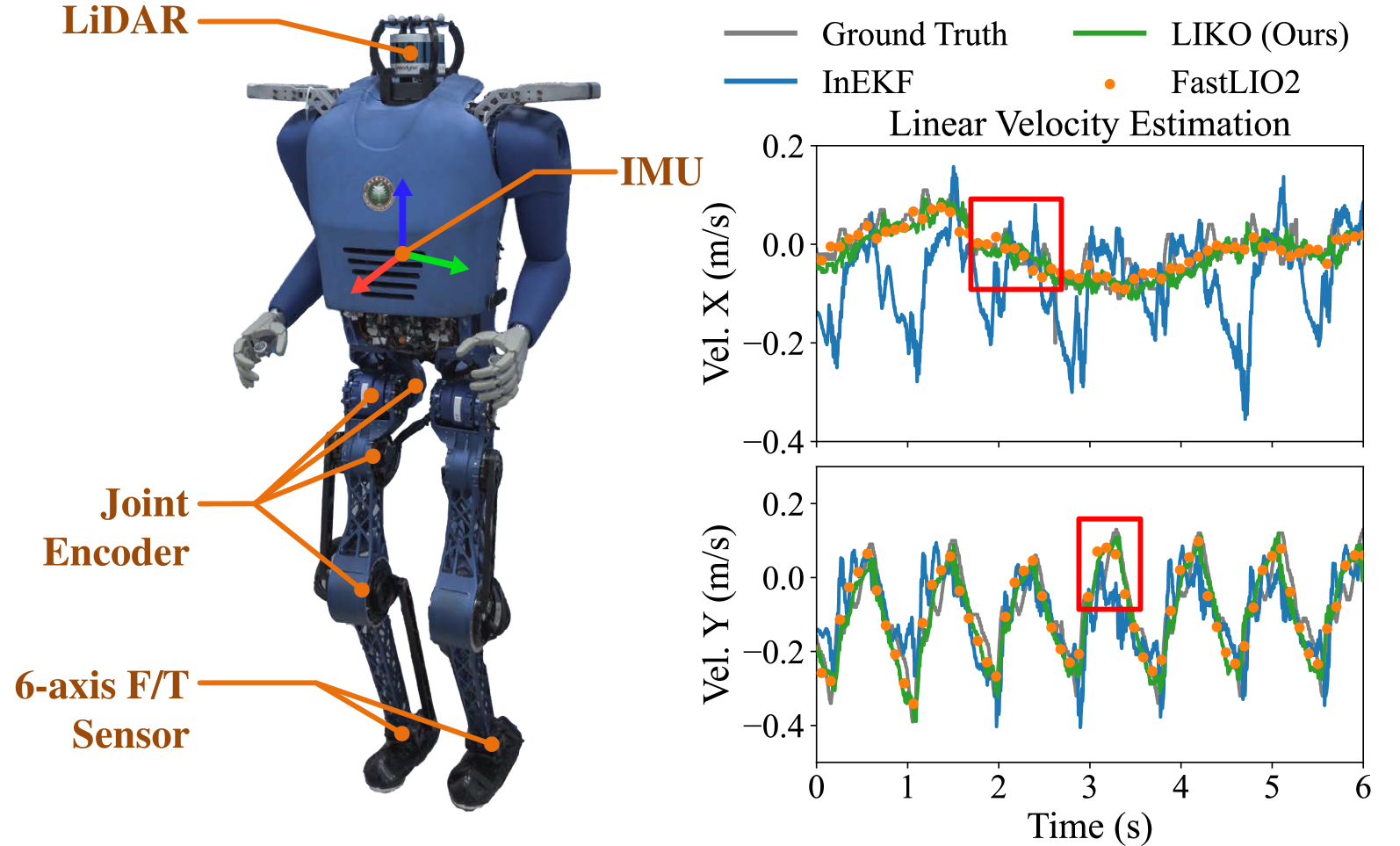
High-frequency and accurate state estimation is crucial for biped robots. This paper presents a tightly-coupled LiDAR-Inertial-Kinematic Odometry (LIKO) for biped robot state estimation based on an iterated extended Kalman filter. Beyond state estimation, the foot contact position is also modeled and estimated. This allows for both position and velocity updates from kinematic measurement. Additionally, the use of kinematic measurement results in an increased output state frequency of about 1kHz. This ensures temporal continuity of the estimated state and makes it practical for control purposes of biped robots. We also announce a biped robot dataset consisting of LiDAR, inertial measurement unit (IMU), joint encoders, force/torque (F/T) sensors, and motion capture ground truth to evaluate the proposed method. The dataset is collected during robot locomotion, and our approach reached the best quantitative result among other LIO-based methods and biped robot state estimation algorithms. The dataset and source code will be available at https://github.com/Mr-Zqr/LIKO.
4/30/2024