Optimization-Based System Identification and Moving Horizon Estimation Using Low-Cost Sensors for a Miniature Car-Like Robot
2404.08362
0
0

Abstract
This paper presents an open-source miniature car-like robot with low-cost sensing and a pipeline for optimization-based system identification, state estimation, and control. The overall robotics platform comes at a cost of less than $700 and thus significantly simplifies the verification of advanced algorithms in a realistic setting. We present a modified bicycle model with Pacejka tire forces to model the dynamics of the considered all-wheel drive vehicle and to prevent singularities of the model at low velocities. Furthermore, we provide an optimization-based system identification approach and a moving horizon estimation (MHE) scheme. In extensive hardware experiments, we show that the presented system identification approach results in a model with high prediction accuracy, while the MHE results in accurate state estimates. Finally, the overall closed-loop system is shown to perform well even in the presence of sensor failure for limited time intervals. All hardware, firmware, and control and estimation software is released under a BSD 2-clause license to promote widespread adoption and collaboration within the community.
Create account to get full access
Overview
- This research paper explores the use of low-cost sensors and optimization-based techniques for system identification and moving horizon estimation of a miniature car-like robot.
- The researchers developed a system called CHRONOS that integrates various onboard and external sensors to estimate the robot's state and parameters.
- The paper presents the sensor setup, optimization-based modeling and estimation approaches, and experimental validation of the proposed system.
Plain English Explanation
The researchers in this study wanted to find a way to accurately track the movement and characteristics of a small, remote-controlled car-like robot using inexpensive sensors. Typically, these kinds of robots are equipped with expensive, high-precision sensors to monitor their position, speed, and other important factors. However, the researchers aimed to achieve similar performance using more affordable, off-the-shelf sensors.
To do this, they developed a system called CHRONOS that combines several different sensors, both on the robot itself and in the environment around it. This includes things like cameras, motion sensors, and even GPS. By using optimization techniques to analyze the data from all these sensors together, the researchers were able to estimate the robot's position, speed, and other key properties with a high degree of accuracy.
The key innovation here is the ability to use low-cost, consumer-grade sensors to achieve state-of-the-art performance in tracking and understanding the behavior of a small, mobile robot. This could make this kind of advanced robotics technology more accessible and affordable for a wider range of applications, from research to commercial products.
Technical Explanation
The researchers developed a system called CHRONOS that integrates various onboard and external sensors to estimate the state and parameters of a miniature car-like robot. The onboard sensors include an inertial measurement unit (IMU), wheel encoders, and a low-cost camera. The external sensors include a motion capture system and a high-precision GPS.
The researchers used an optimization-based approach to model the robot's dynamics and estimate its state, including position, orientation, velocity, and wheel speeds. This approach involves formulating an optimization problem that minimizes the difference between the sensor measurements and the predicted robot states, subject to the robot's dynamic constraints.
The experiments validated the performance of the CHRONOS system in accurately tracking the robot's state and parameters, even in the presence of sensor noise and disturbances. The researchers compared the CHRONOS estimates to ground truth data from a high-precision motion capture system and demonstrated the system's ability to handle various maneuvers, such as turning, acceleration, and deceleration.
Critical Analysis
The researchers acknowledge several limitations and areas for further research in their paper. For example, the optimization-based approach used in CHRONOS can be computationally intensive, which may limit its real-time performance, especially for larger robot systems. Additionally, the paper does not address the robustness of the system to sensor failures or the integration of the CHRONOS system with higher-level control or planning algorithms.
Another potential concern is the reliance on external sensors, such as the motion capture system and high-precision GPS. While these sensors provide accurate ground truth data for validation, they may not be practical or available in many real-world scenarios. It would be valuable to explore the performance of the CHRONOS system using only the onboard sensors, which may be more representative of a practical deployment.
Despite these limitations, the CHRONOS system represents a promising approach to leveraging low-cost sensors and optimization-based techniques for state estimation and system identification of mobile robots. The researchers' work contributes to the ongoing advancements in radar odometry and tightly coupled sensor fusion for robotics applications, which could lead to more affordable and accessible solutions for a wide range of robotic systems.
Conclusion
This research paper presents the CHRONOS system, which demonstrates the feasibility of using low-cost sensors and optimization-based techniques for accurate state estimation and system identification of a miniature car-like robot. The integrated sensor setup and optimization-based modeling approach enable the CHRONOS system to track the robot's state and parameters with high precision, even in the presence of sensor noise and disturbances.
The researchers' work contributes to the ongoing efforts in the robotics community to develop robust and cost-effective state estimation solutions for a wide range of mobile robotic platforms, from small, car-like robots to larger, legged robots. The insights and techniques presented in this paper could have broader implications for the design and deployment of affordable, high-performance robotic systems in various applications, from research and education to commercial and industrial settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE
Jiarong Kang, Yi Wang, Xiaobin Xiong
0
0
In this paper, we present a fast and decentralized state estimation framework for the control of legged locomotion. The nonlinear estimation of the floating base states is decentralized to an orientation estimation via Extended Kalman Filter (EKF) and a linear velocity estimation via Moving Horizon Estimation (MHE). The EKF fuses the inertia sensor with vision to estimate the floating base orientation. The MHE uses the estimated orientation with all the sensors within a time window in the past to estimate the linear velocities based on a time-varying linear dynamics formulation of the interested states with state constraints. More importantly, a marginalization method based on the optimization structure of the full information filter (FIF) is proposed to convert the equality-constrained FIF to an equivalent MHE. This decoupling of state estimation promotes the desired balance of computation efficiency, accuracy of estimation, and the inclusion of state constraints. The proposed method is shown to be capable of providing accurate state estimation to several legged robots, including the highly dynamic hopping robot PogoX, the bipedal robot Cassie, and the quadrupedal robot Unitree Go1, with a frequency at 200 Hz and a window interval of 0.1s.
6/3/2024
Safe and Efficient Estimation for Robotics through the Optimal Use of Resources
Frederike Dumbgen
0
0
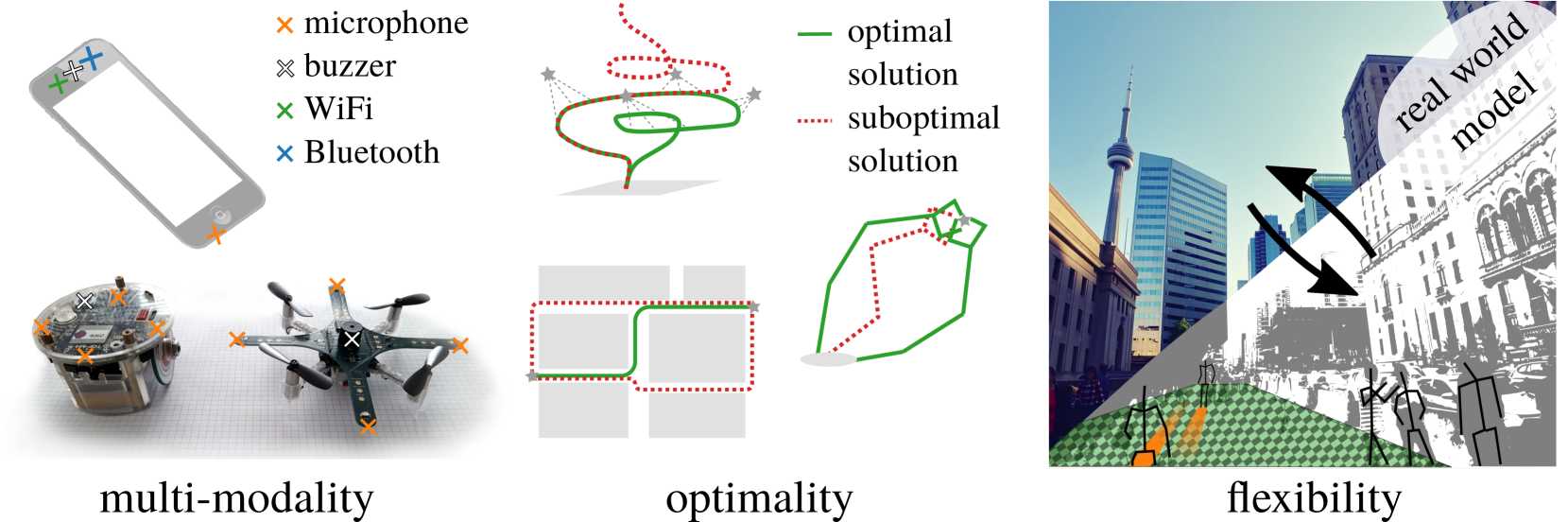
In order to operate in and interact with the physical world, robots need to have estimates of the current and future state of the environment. We thus equip robots with sensors and build models and algorithms that, given some measurements, produce estimates of the current or future states. Environments can be unpredictable and sensors are not perfect. Therefore, it is important to both use all information available, and to do so optimally: making sure that we get the best possible answer from the amount of information we have. However, in prevalent research, uncommon sensors, such as sound or radio-frequency signals, are commonly ignored for state estimation; and the most popular solvers employed to produce state estimates are only of local nature, meaning they may produce suboptimal estimates for the typically non-convex estimation problems. My research aims to use resources more optimally, by building on 1) multi-modality: using ubiquitous RF transceivers and microphones to support state estimation, 2) building certifiably optimal solvers and 3) learning and improving adequate models from data.
5/30/2024

OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Alexander Schperberg, Yusuke Tanaka, Saviz Mowlavi, Feng Xu, Bharathan Balaji, Dennis Hong
0
0
State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
4/30/2024
🛠️
Trajectory Optimization for Adaptive Informative Path Planning with Multimodal Sensing
Joshua Ott, Edward Balaban, Mykel Kochenderfer
0
0
We consider the problem of an autonomous agent equipped with multiple sensors, each with different sensing precision and energy costs. The agent's goal is to explore the environment and gather information subject to its resource constraints in unknown, partially observable environments. The challenge lies in reasoning about the effects of sensing and movement while respecting the agent's resource and dynamic constraints. We formulate the problem as a trajectory optimization problem and solve it using a projection-based trajectory optimization approach where the objective is to reduce the variance of the Gaussian process world belief. Our approach outperforms previous approaches in long horizon trajectories by achieving an overall variance reduction of up to 85% and reducing the root-mean square error in the environment belief by 50%. This approach was developed in support of rover path planning for the NASA VIPER Mission.
4/30/2024