Fast End-to-End Generation of Belief Space Paths for Minimum Sensing Navigation

0

Sign in to get full access
Overview
- This paper presents a fast end-to-end approach for generating belief space paths for minimum sensing navigation.
- The proposed method aims to efficiently plan robot trajectories that minimize the required sensing while reaching a desired goal.
- The authors leverage deep learning techniques to enable real-time path planning in belief space.
Plain English Explanation
The paper focuses on a challenging problem in robotics: how to plan the most efficient path for a robot to reach a goal while minimizing the amount of sensing (e.g., using sensors like cameras or lidar) required along the way. This is important for scenarios where sensors are limited or expensive, or when the robot needs to operate in environments with significant uncertainty.
The key idea is to use a deep learning approach to quickly generate "belief space" paths - paths that not only consider the robot's position, but also the robot's uncertainty about its surroundings. By optimizing for paths that minimize the sensing needed, the robot can reach its goal more efficiently.
The authors demonstrate that their approach can generate these belief space paths in a fast, end-to-end manner, without requiring complex planning algorithms or extensive computation. This could enable real-time path planning for robots operating in dynamic, uncertain environments.
Technical Explanation
The paper presents a deep learning-based approach for fast, end-to-end generation of belief space paths for minimum sensing navigation. The key elements are:
-
Problem Formulation: The authors frame the problem as finding a path that minimizes the expected information gain (sensing) required to reach a goal state, while considering the robot's belief about its surroundings.
-
Neural Network Architecture: They propose a two-stage neural network that takes in the robot's current belief state and goal, and outputs a sequence of belief states that form the optimal path.
-
Training and Deployment: The network is trained on simulated environments using reinforcement learning. At runtime, the trained model can quickly generate belief space paths for new scenarios.
The authors evaluate their approach on various simulated environments and demonstrate that it can produce high-quality paths with significant improvements in computation time compared to traditional planning methods.
Critical Analysis
The paper presents a promising approach for fast belief space planning, but there are a few key limitations and areas for further research:
- The experiments are limited to 2D simulated environments, so it's unclear how well the approach would scale to more complex, real-world 3D environments.
- The authors mention that the training process can be computationally expensive, which may limit the practical applicability of the method.
- There is no discussion of how the approach would handle dynamic environments or unexpected obstacles during execution.
Further research could explore ways to reduce the training burden, extend the method to 3D scenarios, and investigate its performance in more realistic, dynamic environments. Additionally, integrating the belief space planning with other navigation modules (e.g., motion control, obstacle avoidance) could improve the overall robustness and applicability of the system.
Conclusion
This paper introduces a novel deep learning-based approach for fast, end-to-end generation of belief space paths that minimize the required sensing for robot navigation. By optimizing for paths that reduce uncertainty, the method could enable more efficient and robust navigation in environments with significant uncertainty.
While the current implementation has some limitations, the core ideas presented in this work represent an important step towards improving the real-time planning capabilities of autonomous robots operating in complex, dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Fast End-to-End Generation of Belief Space Paths for Minimum Sensing Navigation
Lukas Taus, Vrushabh Zinage, Takashi Tanaka, Richard Tsai
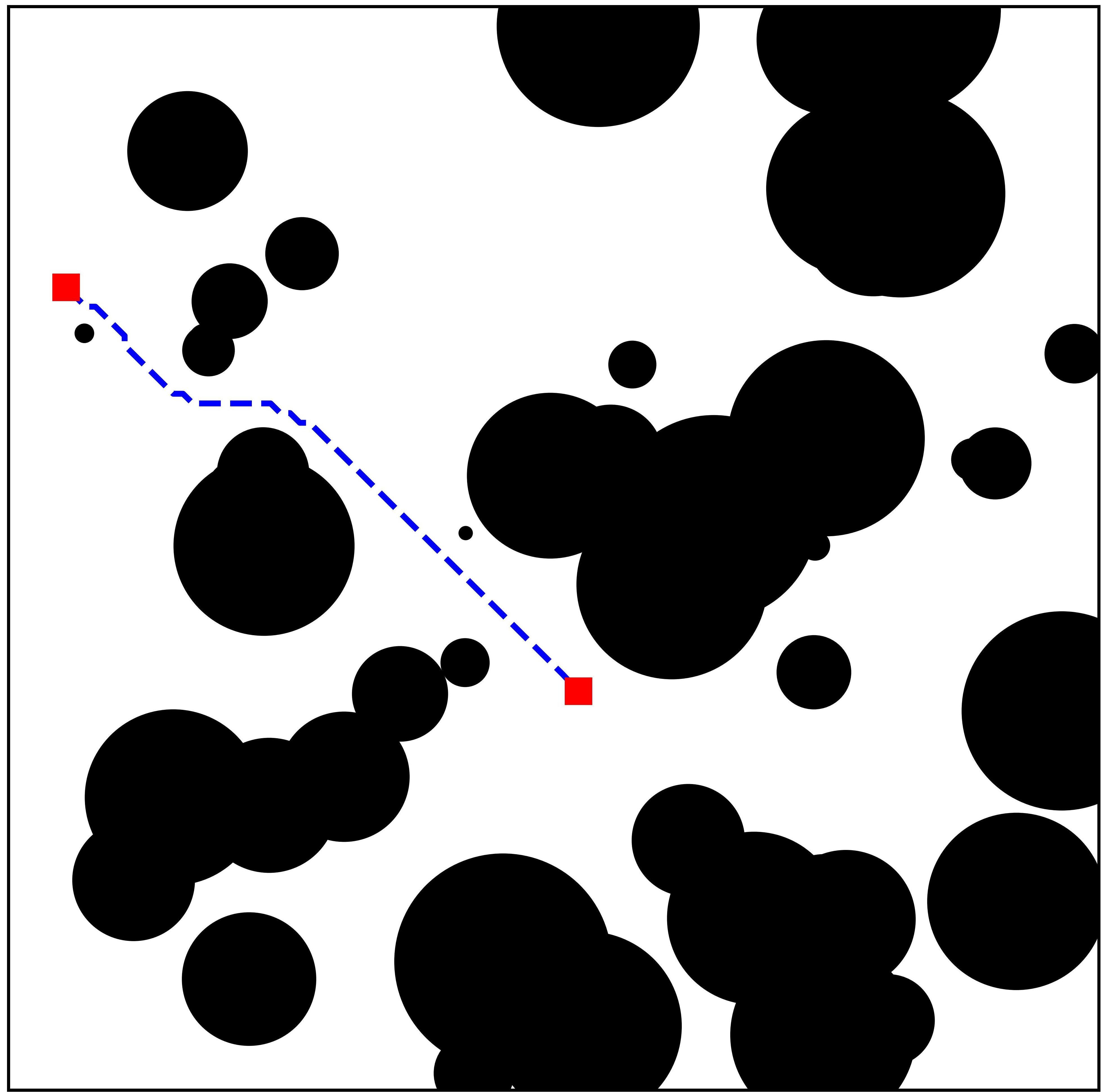
We revisit the problem of motion planning in the Gaussian belief space. Motivated by the fact that most existing sampling-based planners suffer from high computational costs due to the high-dimensional nature of the problem, we propose an approach that leverages a deep learning model to predict optimal path candidates directly from the problem description. Our proposed approach consists of three steps. First, we prepare a training dataset comprising a large number of input-output pairs: the input image encodes the problem to be solved (e.g., start states, goal states, and obstacle locations), whereas the output image encodes the solution (i.e., the ground truth of the shortest path). Any existing planner can be used to generate this training dataset. Next, we leverage the U-Net architecture to learn the dependencies between the input and output data. Finally, a trained U-Net model is applied to a new problem encoded as an input image. From the U-Net's output image, which is interpreted as a distribution of paths,an optimal path candidate is reconstructed. The proposed method significantly reduces computation time compared to the sampling-based baseline algorithm.
Read more9/20/2024
0
PPNet: A Two-Stage Neural Network for End-to-end Path Planning
Qinglong Meng, Chongkun Xia, Xueqian Wang, Songping Mai, Bin Liang
The classical path planners, such as sampling-based path planners, can provide probabilistic completeness guarantees in the sense that the probability that the planner fails to return a solution if one exists, decays to zero as the number of samples approaches infinity. However, finding a near-optimal feasible solution in a given period is challenging in many applications such as the autonomous vehicle. To achieve an end-to-end near-optimal path planner, we first divide the path planning problem into two subproblems, which are path space segmentation and waypoints generation in the given path's space. We further propose a two-stage neural network named Path Planning Network (PPNet) each stage solves one of the subproblems abovementioned. Moreover, we propose a novel efficient data generation method for path planning named EDaGe-PP. EDaGe-PP can generate data with continuous-curvature paths with analytical expression while satisfying the clearance requirement. The results show the total computation time of generating random 2D path planning data is less than 1/33 and the success rate of PPNet trained by the dataset that is generated by EDaGe-PP is about 2 times compared to other methods. We validate PPNet against state-of-the-art path planning methods. The results show that PPNet can find a near-optimal solution in 15.3ms, which is much shorter than the state-of-the-art path planners.
Read more4/24/2024

0
Navigating the Human Maze: Real-Time Robot Pathfinding with Generative Imitation Learning
Martin Moder, Stephen Adhisaputra, Josef Pauli
This paper addresses navigation in crowded environments by integrating goal-conditioned generative models with Sampling-based Model Predictive Control (SMPC). We introduce goal-conditioned autoregressive models to generate crowd behaviors, capturing intricate interactions among individuals. The model processes potential robot trajectory samples and predicts the reactions of surrounding individuals, enabling proactive robotic navigation in complex scenarios. Extensive experiments show that this algorithm enables real-time navigation, significantly reducing collision rates and path lengths, and outperforming selected baseline methods. The practical effectiveness of this algorithm is validated on an actual robotic platform, demonstrating its capability in dynamic settings.
Read more8/9/2024

0
TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Daeun Song, Jing Liang, Xuesu Xiao, Dinesh Manocha
We present a multi-modal trajectory generation and selection algorithm for real-world mapless outdoor navigation in challenging scenarios with unstructured off-road features like buildings, grass, and curbs. Our goal is to compute suitable trajectories that (1) satisfy the environment-specific traversability constraints and (2) generate human-like paths while navigating in crosswalks, sidewalks, etc. Our formulation uses a Conditional Variational Autoencoder (CVAE) generative model enhanced with traversability constraints to generate multiple candidate trajectories for global navigation. We use VLMs and a visual prompting approach with their zero-shot ability of semantic understanding and logical reasoning to choose the best trajectory given the contextual information about the task. We evaluate our methods in various outdoor scenes with wheeled robots and compare the performance with other global navigation algorithms. In practice, we observe at least 3.35% improvement in traversability and 20.61% improvement in terms of human-like navigation in generated trajectories in challenging outdoor navigation scenarios.
Read more8/9/2024