PPNet: A Two-Stage Neural Network for End-to-end Path Planning

0
Sign in to get full access
Overview
- Presents a novel neural network architecture called PPNet for end-to-end near-optimal path planning
- Introduces an efficient data generation method called EDaGe-PP to train the PPNet model
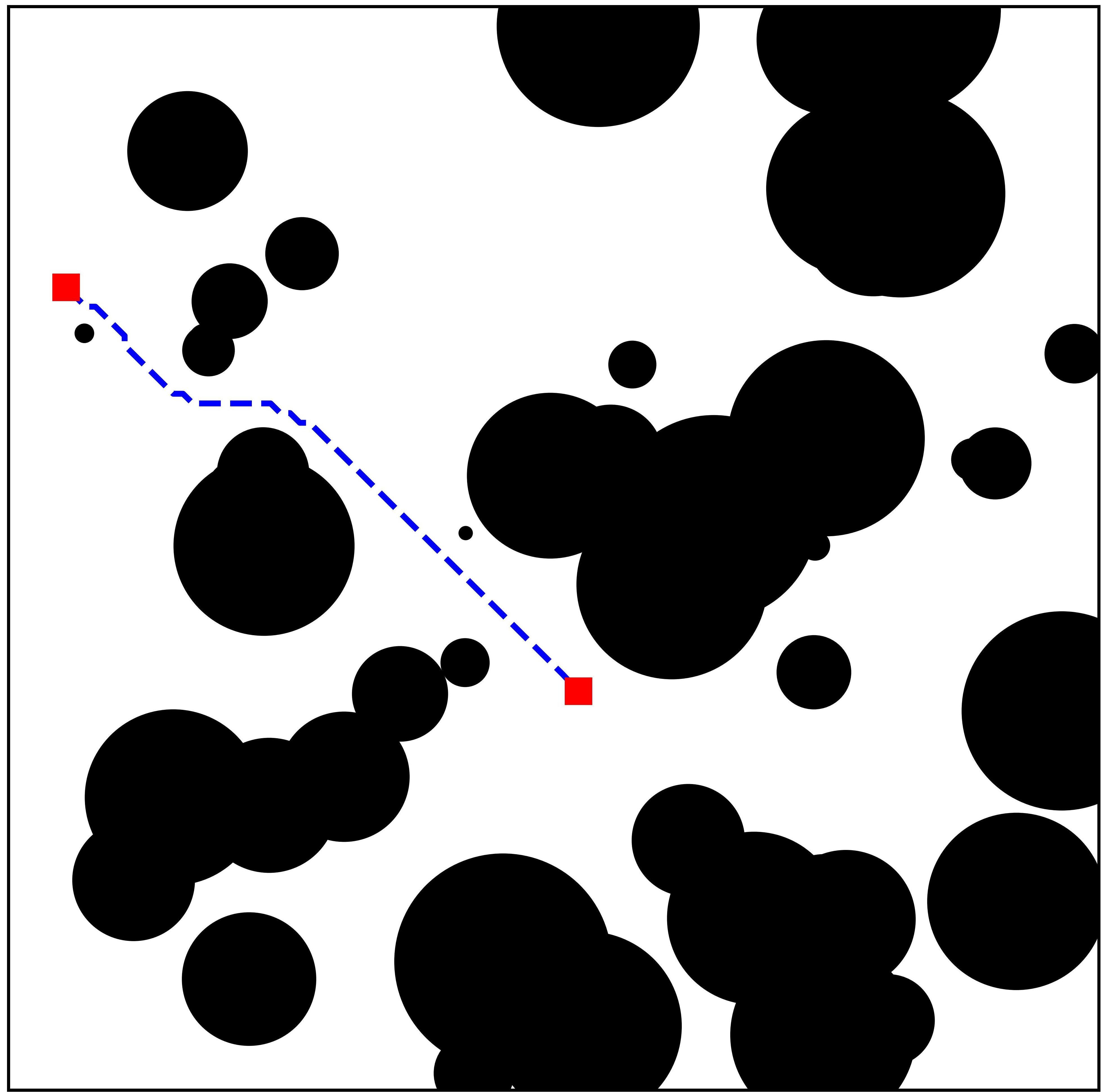
- Demonstrates the ability of PPNet to produce near-optimal paths in complex environments with obstacles
Plain English Explanation
The paper introduces a new deep learning model called PPNet that can plan near-optimal paths in complex environments with obstacles. Traditional path planning methods often rely on manually-designed algorithms, which can be time-consuming and inefficient. In contrast, PPNet is an end-to-end neural network that can learn to plan near-optimal paths directly from data.
To train PPNet, the researchers developed a novel data generation method called EDaGe-PP, which can efficiently produce high-quality training data. EDaGe-PP generates diverse environments with obstacles and computes near-optimal paths using a traditional path planning algorithm. This data is then used to train the PPNet model to learn the underlying patterns and generalize to new environments.
The key advantage of PPNet is its ability to produce near-optimal paths in real-time, without the need for computationally expensive planning algorithms. This makes it well-suited for applications where fast and efficient path planning is required, such as robotics, autonomous vehicles, and drone navigation.
Technical Explanation
The paper presents a novel neural network architecture called PPNet that can perform end-to-end near-optimal path planning. The core of the PPNet model is a convolutional neural network that takes an environment map as input and outputs a set of waypoints that define a near-optimal path.
To train the PPNet model, the researchers developed a data generation method called EDaGe-PP. EDaGe-PP generates diverse environments with obstacles and computes near-optimal paths using a traditional path planning algorithm, such as A* or Dijkstra's algorithm. The resulting data is then used to train the PPNet model, allowing it to learn the underlying patterns and generalize to new environments.
The PPNet architecture consists of several convolutional and pooling layers, followed by fully connected layers that output the final path waypoints. The researchers experimented with different network configurations and found that a deeper network with more layers generally performed better, but at the cost of increased computational complexity.
The paper also presents extensive experiments evaluating the performance of PPNet on various benchmark environments. The results show that PPNet can consistently produce near-optimal paths in complex environments, while being significantly faster than traditional path planning algorithms.
Critical Analysis
The paper presents a promising approach to end-to-end path planning, but there are a few caveats and limitations worth noting:
-
The performance of PPNet is heavily dependent on the quality of the training data generated by EDaGe-PP. If the data generation process fails to capture important aspects of the real-world environments, the model may not generalize well.
-
The paper only evaluates PPNet on 2D environments with static obstacles. It's unclear how well the model would perform in more complex, 3D environments with dynamic obstacles, such as those encountered in real-world robotics and autonomous vehicle applications.
-
The paper does not provide a detailed analysis of the computational complexity and runtime performance of PPNet compared to traditional path planning algorithms. This information would be crucial for understanding the practical benefits and limitations of the proposed approach.
-
The paper does not address the issue of safety and reliability, which are critical concerns in many real-world path planning applications. Further research is needed to ensure that PPNet can produce safe and reliable paths in all situations.
Despite these limitations, the PPNet architecture and the EDaGe-PP data generation method represent an interesting and promising approach to end-to-end path planning. The paper's findings suggest that deep learning-based path planning models can be a viable alternative to traditional algorithms in certain applications.
Conclusion
The paper presents a novel neural network architecture called PPNet for end-to-end near-optimal path planning. By combining PPNet with an efficient data generation method called EDaGe-PP, the researchers have demonstrated the ability to produce high-quality paths in complex environments with obstacles.
The key advantage of PPNet is its ability to perform path planning in real-time, without the need for computationally expensive algorithms. This makes it a promising approach for applications where fast and efficient path planning is required, such as robotics, autonomous vehicles, and drone navigation.
While the paper has some limitations and caveats, the PPNet architecture and the EDaGe-PP data generation method represent an important step forward in the field of deep learning-based path planning. Further research and development in this area could lead to significant advancements in the ability of autonomous systems to navigate complex environments safely and efficiently.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PPNet: A Two-Stage Neural Network for End-to-end Path Planning
Qinglong Meng, Chongkun Xia, Xueqian Wang, Songping Mai, Bin Liang
The classical path planners, such as sampling-based path planners, can provide probabilistic completeness guarantees in the sense that the probability that the planner fails to return a solution if one exists, decays to zero as the number of samples approaches infinity. However, finding a near-optimal feasible solution in a given period is challenging in many applications such as the autonomous vehicle. To achieve an end-to-end near-optimal path planner, we first divide the path planning problem into two subproblems, which are path space segmentation and waypoints generation in the given path's space. We further propose a two-stage neural network named Path Planning Network (PPNet) each stage solves one of the subproblems abovementioned. Moreover, we propose a novel efficient data generation method for path planning named EDaGe-PP. EDaGe-PP can generate data with continuous-curvature paths with analytical expression while satisfying the clearance requirement. The results show the total computation time of generating random 2D path planning data is less than 1/33 and the success rate of PPNet trained by the dataset that is generated by EDaGe-PP is about 2 times compared to other methods. We validate PPNet against state-of-the-art path planning methods. The results show that PPNet can find a near-optimal solution in 15.3ms, which is much shorter than the state-of-the-art path planners.
Read more4/24/2024
📈
0
NNPP: A Learning-Based Heuristic Model for Accelerating Optimal Path Planning on Uneven Terrain
Yiming Ji, Yang Liu, Guanghu Xie, Boyu Ma, Zongwu Xie, Baoshi Cao
Intelligent autonomous path planning is essential for enhancing the exploration efficiency of mobile robots operating in uneven terrains like planetary surfaces and off-road environments.In this paper, we propose the NNPP model for computing the heuristic region, enabling foundation algorithms like Astar to find the optimal path solely within this reduced search space, effectively decreasing the search time. The NNPP model learns semantic information about start and goal locations, as well as map representations, from numerous pre-annotated optimal path demonstrations, and produces a probabilistic distribution over each pixel representing the likelihood of it belonging to an optimal path on the map. More specifically, the paper computes the traversal cost for each grid cell from the slope, roughness and elevation difference obtained from the digital elevation model. Subsequently, the start and goal locations are encoded using a Gaussian distribution and different location encoding parameters are analyzed for their effect on model performance. After training, the NNPP model is able to textcolor{revision}{accelerate} path planning on novel maps.
Read more6/21/2024

0
Fast End-to-End Generation of Belief Space Paths for Minimum Sensing Navigation
Lukas Taus, Vrushabh Zinage, Takashi Tanaka, Richard Tsai
We revisit the problem of motion planning in the Gaussian belief space. Motivated by the fact that most existing sampling-based planners suffer from high computational costs due to the high-dimensional nature of the problem, we propose an approach that leverages a deep learning model to predict optimal path candidates directly from the problem description. Our proposed approach consists of three steps. First, we prepare a training dataset comprising a large number of input-output pairs: the input image encodes the problem to be solved (e.g., start states, goal states, and obstacle locations), whereas the output image encodes the solution (i.e., the ground truth of the shortest path). Any existing planner can be used to generate this training dataset. Next, we leverage the U-Net architecture to learn the dependencies between the input and output data. Finally, a trained U-Net model is applied to a new problem encoded as an input image. From the U-Net's output image, which is interpreted as a distribution of paths,an optimal path candidate is reconstructed. The proposed method significantly reduces computation time compared to the sampling-based baseline algorithm.
Read more9/20/2024

0
Neural MP: A Generalist Neural Motion Planner
Murtaza Dalal, Jiahui Yang, Russell Mendonca, Youssef Khaky, Ruslan Salakhutdinov, Deepak Pathak
The current paradigm for motion planning generates solutions from scratch for every new problem, which consumes significant amounts of time and computational resources. For complex, cluttered scenes, motion planning approaches can often take minutes to produce a solution, while humans are able to accurately and safely reach any goal in seconds by leveraging their prior experience. We seek to do the same by applying data-driven learning at scale to the problem of motion planning. Our approach builds a large number of complex scenes in simulation, collects expert data from a motion planner, then distills it into a reactive generalist policy. We then combine this with lightweight optimization to obtain a safe path for real world deployment. We perform a thorough evaluation of our method on 64 motion planning tasks across four diverse environments with randomized poses, scenes and obstacles, in the real world, demonstrating an improvement of 23%, 17% and 79% motion planning success rate over state of the art sampling, optimization and learning based planning methods. Video results available at mihdalal.github.io/neuralmotionplanner
Read more9/10/2024