Feasibility Consistent Representation Learning for Safe Reinforcement Learning

0
Sign in to get full access
Overview
- This paper proposes a method for learning representations that are consistent with the feasibility of actions, which can improve the safety of reinforcement learning agents.
- The key idea is to learn a representation that captures the constraints on the agent's actions, allowing it to avoid unsafe or infeasible actions during training and deployment.
- The authors demonstrate the effectiveness of their approach on several simulated environments, showing that it can lead to more reliable and robust reinforcement learning agents.
Plain English Explanation
Reinforcement learning is a powerful technique for training AI agents to complete complex tasks, but it can be challenging to ensure the agents behave safely and reliably. One common issue is that the agents may learn to take actions that are technically possible but inadvisable or even dangerous in the real world.
To address this, the researchers in this paper developed a method to help the agent learn a representation of the world that captures the constraints on its actions. This means the agent doesn't just learn which actions are possible, but also which ones are feasible or safe to take in a given situation.
By learning this "feasibility-consistent" representation, the agent can avoid taking actions that it knows are unsafe or infeasible, even if they are technically possible. The authors show that this approach leads to more reliable and robust reinforcement learning agents across a variety of simulated environments.
The key insight is that by explicitly modeling the constraints on the agent's actions, you can guide the learning process to find representations that better reflect the realities of the agent's operating environment. This helps the agent make safer and more reliable decisions, which is crucial for real-world applications of reinforcement learning.
Technical Explanation
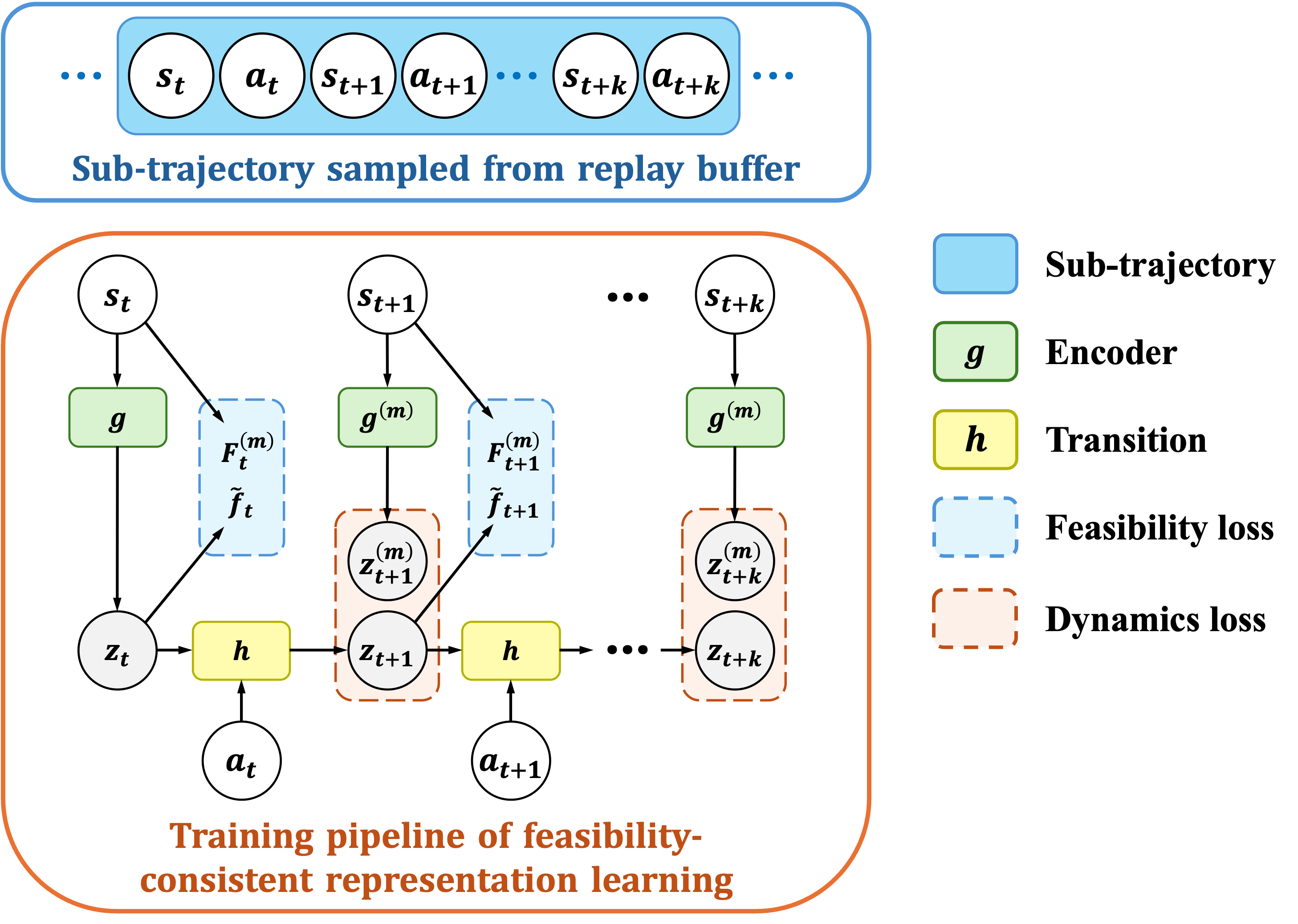
The authors propose a method called Feasibility-Consistent Representation Learning (FCRL) to address the challenge of safe reinforcement learning. The core idea is to learn a representation of the agent's observations that is consistent with the feasibility of different actions.
Specifically, FCRL introduces an auxiliary task during representation learning where the agent must predict whether a randomly sampled action is feasible or not, given the current observation. By optimizing the representation to support this "feasibility prediction" task, the authors hypothesize that the learned representation will better capture the constraints and safety considerations relevant to the agent's decision-making.
The authors evaluate FCRL across several simulated environments, including classic control tasks and a safety-critical autonomous driving scenario. They find that agents trained with FCRL are able to more reliably avoid infeasible or unsafe actions compared to standard representation learning approaches.
The authors also analyze the representations learned by FCRL, showing that they indeed capture relevant constraints and safety considerations in a way that standard methods do not. This allows the FCRL agents to make more reliable decisions, improving their overall performance and safety.
Critical Analysis
The authors provide a thorough empirical evaluation of their FCRL method, demonstrating its effectiveness across multiple benchmark tasks. However, the paper does not deeply explore the limitations or potential drawbacks of the approach.
One open question is how well FCRL would scale to more complex, real-world environments with highly nuanced safety considerations. The simulated tasks used in the evaluation, while informative, may not fully capture the challenges of deploying reinforcement learning in safety-critical, high-stakes domains.
Additionally, the paper does not discuss how the FCRL approach would interact with other techniques for improving the safety of reinforcement learning, such as constraint-based methods or counterfactual reasoning. Integrating FCRL with these complementary approaches could potentially lead to even more robust and reliable reinforcement learning agents.
Further research is also needed to understand the inductive biases and limitations of the feasibility prediction task used in FCRL. It's possible that this auxiliary task may not capture all relevant safety considerations, or that it could introduce unintended biases into the learned representation.
Overall, the FCRL method represents an interesting and promising approach to safe reinforcement learning, but more work is needed to fully understand its strengths, weaknesses, and practical applicability.
Conclusion
This paper introduces a novel method called Feasibility-Consistent Representation Learning (FCRL) that aims to improve the safety and reliability of reinforcement learning agents. The key idea is to learn a representation of the agent's observations that captures the constraints and feasibility of different actions, allowing the agent to avoid unsafe or infeasible decisions.
The authors demonstrate the effectiveness of FCRL across several simulated environments, showing that it can lead to more reliable and robust reinforcement learning agents compared to standard representation learning approaches. This work represents an important step towards developing safe and reliable AI systems that can be deployed in the real world.
While further research is needed to fully understand the limitations and potential of the FCRL method, this paper provides a valuable contribution to the field of safe reinforcement learning. By explicitly modeling the constraints on an agent's actions, the authors have shown that it is possible to guide the learning process towards representations that better reflect the realities of the agent's operating environment, ultimately leading to more trustworthy and dependable AI systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Feasibility Consistent Representation Learning for Safe Reinforcement Learning
Zhepeng Cen, Yihang Yao, Zuxin Liu, Ding Zhao
In the field of safe reinforcement learning (RL), finding a balance between satisfying safety constraints and optimizing reward performance presents a significant challenge. A key obstacle in this endeavor is the estimation of safety constraints, which is typically more difficult than estimating a reward metric due to the sparse nature of the constraint signals. To address this issue, we introduce a novel framework named Feasibility Consistent Safe Reinforcement Learning (FCSRL). This framework combines representation learning with feasibility-oriented objectives to identify and extract safety-related information from the raw state for safe RL. Leveraging self-supervised learning techniques and a more learnable safety metric, our approach enhances the policy learning and constraint estimation. Empirical evaluations across a range of vector-state and image-based tasks demonstrate that our method is capable of learning a better safety-aware embedding and achieving superior performance than previous representation learning baselines.
Read more6/14/2024
0
Safe Reinforcement Learning with Learned Non-Markovian Safety Constraints
Siow Meng Low, Akshat Kumar
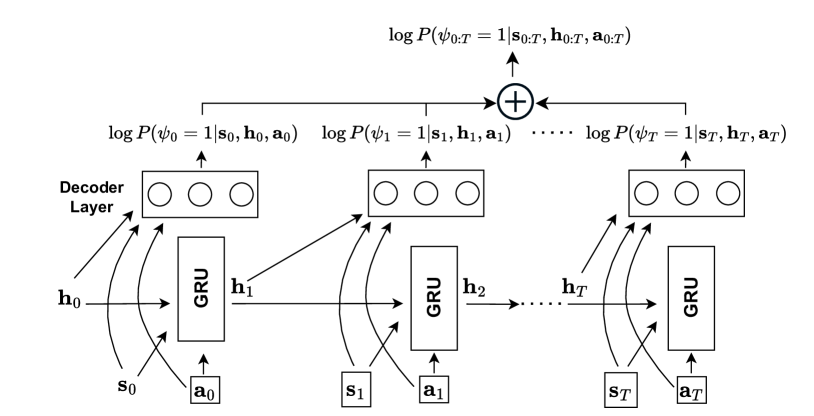
In safe Reinforcement Learning (RL), safety cost is typically defined as a function dependent on the immediate state and actions. In practice, safety constraints can often be non-Markovian due to the insufficient fidelity of state representation, and safety cost may not be known. We therefore address a general setting where safety labels (e.g., safe or unsafe) are associated with state-action trajectories. Our key contributions are: first, we design a safety model that specifically performs credit assignment to assess contributions of partial state-action trajectories on safety. This safety model is trained using a labeled safety dataset. Second, using RL-as-inference strategy we derive an effective algorithm for optimizing a safe policy using the learned safety model. Finally, we devise a method to dynamically adapt the tradeoff coefficient between reward maximization and safety compliance. We rewrite the constrained optimization problem into its dual problem and derive a gradient-based method to dynamically adjust the tradeoff coefficient during training. Our empirical results demonstrate that this approach is highly scalable and able to satisfy sophisticated non-Markovian safety constraints.
Read more5/7/2024
🏅
0
A Survey of Constraint Formulations in Safe Reinforcement Learning
Akifumi Wachi, Xun Shen, Yanan Sui
Safety is critical when applying reinforcement learning (RL) to real-world problems. As a result, safe RL has emerged as a fundamental and powerful paradigm for optimizing an agent's policy while incorporating notions of safety. A prevalent safe RL approach is based on a constrained criterion, which seeks to maximize the expected cumulative reward subject to specific safety constraints. Despite recent effort to enhance safety in RL, a systematic understanding of the field remains difficult. This challenge stems from the diversity of constraint representations and little exploration of their interrelations. To bridge this knowledge gap, we present a comprehensive review of representative constraint formulations, along with a curated selection of algorithms designed specifically for each formulation. In addition, we elucidate the theoretical underpinnings that reveal the mathematical mutual relations among common problem formulations. We conclude with a discussion of the current state and future directions of safe reinforcement learning research.
Read more5/9/2024
0
Safe and Balanced: A Framework for Constrained Multi-Objective Reinforcement Learning
Shangding Gu, Bilgehan Sel, Yuhao Ding, Lu Wang, Qingwei Lin, Alois Knoll, Ming Jin
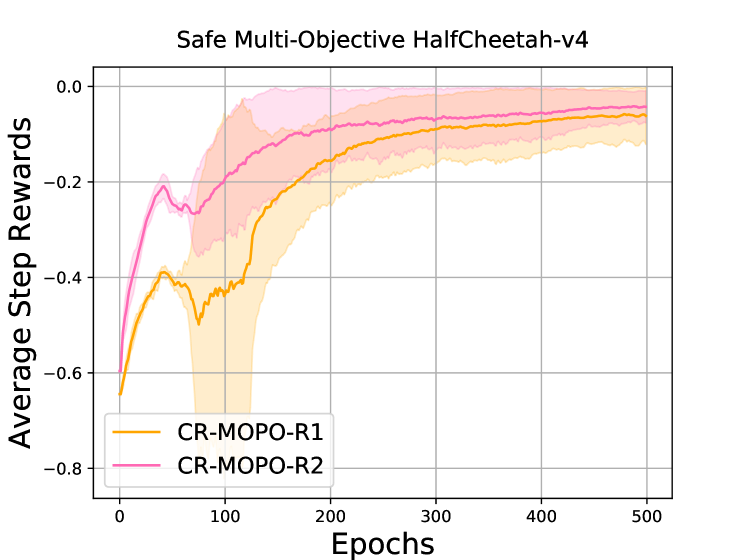
In numerous reinforcement learning (RL) problems involving safety-critical systems, a key challenge lies in balancing multiple objectives while simultaneously meeting all stringent safety constraints. To tackle this issue, we propose a primal-based framework that orchestrates policy optimization between multi-objective learning and constraint adherence. Our method employs a novel natural policy gradient manipulation method to optimize multiple RL objectives and overcome conflicting gradients between different tasks, since the simple weighted average gradient direction may not be beneficial for specific tasks' performance due to misaligned gradients of different task objectives. When there is a violation of a hard constraint, our algorithm steps in to rectify the policy to minimize this violation. We establish theoretical convergence and constraint violation guarantees in a tabular setting. Empirically, our proposed method also outperforms prior state-of-the-art methods on challenging safe multi-objective reinforcement learning tasks.
Read more5/28/2024