Finding Dino: A plug-and-play framework for unsupervised detection of out-of-distribution objects using prototypes

0

Sign in to get full access
Overview
- This paper presents "Finding Dino", a framework for unsupervised detection of out-of-distribution (OOD) objects using prototype learning.
- The framework aims to identify objects that are different from the training data, without requiring labeled OOD examples.
- It uses a plug-and-play approach that can be integrated with various vision models.
Plain English Explanation
The paper introduces a new system called "Finding Dino" that can automatically detect objects in images that are different from the ones it was trained on. This is useful for identifying unexpected or anomalous objects, like a dinosaur in a scene, without needing to explicitly label those unusual objects during training.
The key idea is to learn "prototypes" - representative examples of the normal objects the system is expecting to see. Then, when presented with a new image, the system can compare the objects in that image to the prototypes and flag anything that doesn't match closely enough as being out-of-distribution. This allows the system to identify anomalies without requiring labeled examples of the unusual objects.
The "plug-and-play" aspect means this prototype-based approach can be integrated with different computer vision models, rather than being tied to a specific architecture. This makes the framework flexible and broadly applicable.
Technical Explanation
The "Finding Dino" framework uses a two-stage approach. First, it learns a set of prototypes that represent the normal, in-distribution objects seen during training. This is done in an unsupervised manner, without needing labels for the out-of-distribution objects.
The prototypes are learned by clustering the feature representations of the training objects. Each cluster center becomes a prototype, acting as a representative example of a particular class of normal objects.
In the second stage, the framework uses these prototypes to detect anomalous objects in new images. For each object proposal in an image, it computes the distance between the object's features and each prototype. If the distance to the nearest prototype is above a learned threshold, the object is flagged as out-of-distribution.
This prototype-based anomaly detection can be integrated with a variety of vision models, providing a flexible, plug-and-play approach to OOD object detection.
Critical Analysis
The paper demonstrates the effectiveness of the "Finding Dino" framework on several benchmark datasets, showing its ability to accurately detect out-of-distribution objects. However, the authors acknowledge that the framework assumes the training data covers the majority of object classes that will be encountered, and may struggle with highly diverse or long-tailed distributions.
Additionally, the unsupervised prototype learning approach relies on the clustering algorithm producing meaningful representations of the normal object classes. In cases where the feature representations are not well-separated, the prototypes may not accurately capture the diversity of in-distribution objects, leading to increased false positive detections.
Further research could explore ways to improve the robustness and generalization of the prototype learning process, as well as investigate alternative anomaly detection strategies beyond simply thresholding the distance to the nearest prototype.
Conclusion
The "Finding Dino" framework presents a promising approach for unsupervised out-of-distribution object detection. By learning a set of prototypical in-distribution object representations, the system can effectively flag anomalous objects without requiring prior knowledge of the unusual classes. The plug-and-play design allows the framework to be easily integrated with various vision models, making it a flexible and practical solution for real-world applications.
While the current implementation has some limitations, the core ideas behind "Finding Dino" showcase the potential of prototype-based learning for robust anomaly detection. As the field of out-of-distribution object recognition continues to evolve, this work contributes valuable insights and a novel framework for addressing this important challenge.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Finding Dino: A plug-and-play framework for unsupervised detection of out-of-distribution objects using prototypes
Poulami Sinhamahapatra, Franziska Schwaiger, Shirsha Bose, Huiyu Wang, Karsten Roscher, Stephan Guennemann
Detecting and localising unknown or Out-of-distribution (OOD) objects in any scene can be a challenging task in vision. Particularly, in safety-critical cases involving autonomous systems like automated vehicles or trains. Supervised anomaly segmentation or open-world object detection models depend on training on exhaustively annotated datasets for every domain and still struggle in distinguishing between background and OOD objects. In this work, we present a plug-and-play generalised framework - PRototype-based zero-shot OOD detection Without Labels (PROWL). It is an inference-based method that does not require training on the domain dataset and relies on extracting relevant features from self-supervised pre-trained models. PROWL can be easily adapted to detect OOD objects in any operational design domain by specifying a list of known classes from this domain. PROWL, as an unsupervised method, outperforms other supervised methods trained without auxiliary OOD data on the RoadAnomaly and RoadObstacle datasets provided in SegmentMeIfYouCan (SMIYC) benchmark. We also demonstrate its suitability for other domains such as rail and maritime scenes.
Read more4/12/2024

0
Towards Open-World Object-based Anomaly Detection via Self-Supervised Outlier Synthesis
Brian K. S. Isaac-Medina, Yona Falinie A. Gaus, Neelanjan Bhowmik, Toby P. Breckon
Object detection is a pivotal task in computer vision that has received significant attention in previous years. Nonetheless, the capability of a detector to localise objects out of the training distribution remains unexplored. Whilst recent approaches in object-level out-of-distribution (OoD) detection heavily rely on class labels, such approaches contradict truly open-world scenarios where the class distribution is often unknown. In this context, anomaly detection focuses on detecting unseen instances rather than classifying detections as OoD. This work aims to bridge this gap by leveraging an open-world object detector and an OoD detector via virtual outlier synthesis. This is achieved by using the detector backbone features to first learn object pseudo-classes via self-supervision. These pseudo-classes serve as the basis for class-conditional virtual outlier sampling of anomalous features that are classified by an OoD head. Our approach empowers our overall object detector architecture to learn anomaly-aware feature representations without relying on class labels, hence enabling truly open-world object anomaly detection. Empirical validation of our approach demonstrates its effectiveness across diverse datasets encompassing various imaging modalities (visible, infrared, and X-ray). Moreover, our method establishes state-of-the-art performance on object-level anomaly detection, achieving an average recall score improvement of over 5.4% for natural images and 23.5% for a security X-ray dataset compared to the current approaches. In addition, our method detects anomalies in datasets where current approaches fail. Code available at https://github.com/KostadinovShalon/oln-ssos.
Read more7/23/2024

0
Proto-OOD: Enhancing OOD Object Detection with Prototype Feature Similarity
Junkun Chen, Jilin Mei, Liang Chen, Fangzhou Zhao, Yu Hu
The limited training samples for object detectors commonly result in low accuracy out-of-distribution (OOD) object detection. We have observed that feature vectors of the same class tend to cluster tightly in feature space, whereas those of different classes are more scattered. This insight motivates us to leverage feature similarity for OOD detection. Drawing on the concept of prototypes prevalent in few-shot learning, we introduce a novel network architecture, Proto-OOD, designed for this purpose. Proto-OOD enhances prototype representativeness through contrastive loss and identifies OOD data by assessing the similarity between input features and prototypes. It employs a negative embedding generator to create negative embedding, which are then used to train the similarity module. Proto-OOD achieves significantly lower FPR95 in MS-COCO dataset and higher mAP for Pascal VOC dataset, when utilizing Pascal VOC as ID dataset and MS-COCO as OOD dataset. Additionally, we identify limitations in existing evaluation metrics and propose an enhanced evaluation protocol.
Read more9/10/2024
0
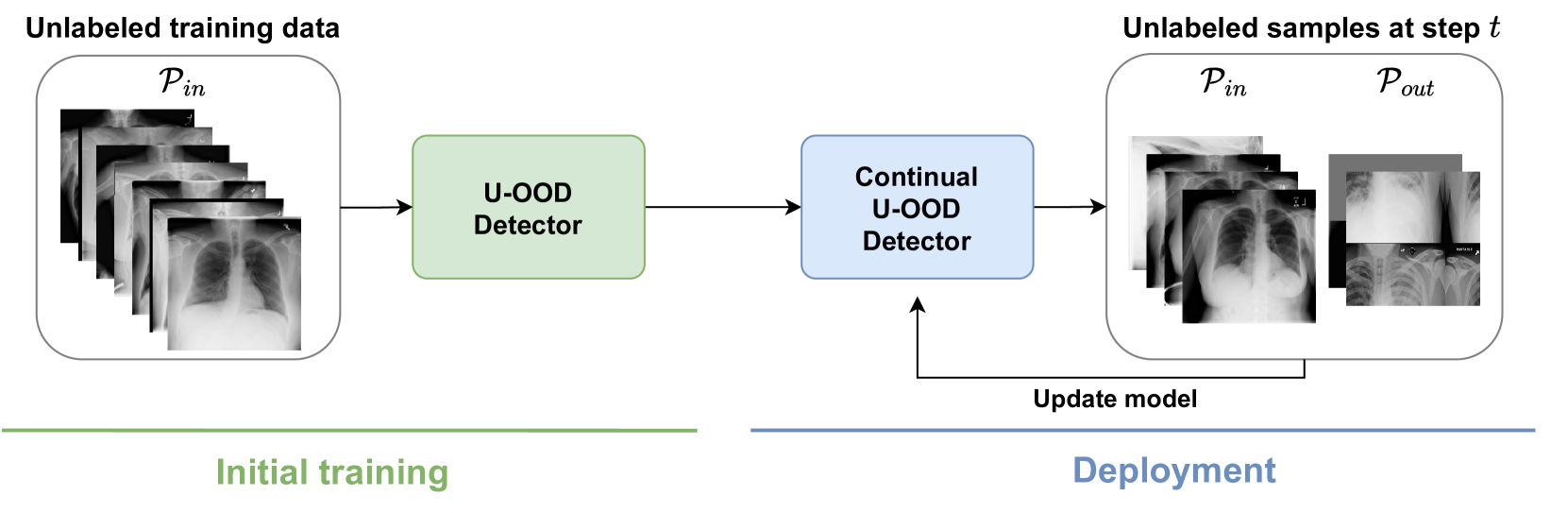
Continual Unsupervised Out-of-Distribution Detection
Lars Doorenbos, Raphael Sznitman, Pablo M'arquez-Neila
Deep learning models excel when the data distribution during training aligns with testing data. Yet, their performance diminishes when faced with out-of-distribution (OOD) samples, leading to great interest in the field of OOD detection. Current approaches typically assume that OOD samples originate from an unconcentrated distribution complementary to the training distribution. While this assumption is appropriate in the traditional unsupervised OOD (U-OOD) setting, it proves inadequate when considering the place of deployment of the underlying deep learning model. To better reflect this real-world scenario, we introduce the novel setting of continual U-OOD detection. To tackle this new setting, we propose a method that starts from a U-OOD detector, which is agnostic to the OOD distribution, and slowly updates during deployment to account for the actual OOD distribution. Our method uses a new U-OOD scoring function that combines the Mahalanobis distance with a nearest-neighbor approach. Furthermore, we design a confidence-scaled few-shot OOD detector that outperforms previous methods. We show our method greatly improves upon strong baselines from related fields.
Read more6/5/2024