A finite-sample generalization bound for stable LPV systems
2405.10054
0
0

Abstract
One of the main theoretical challenges in learning dynamical systems from data is providing upper bounds on the generalization error, that is, the difference between the expected prediction error and the empirical prediction error measured on some finite sample. In machine learning, a popular class of such bounds are the so-called Probably Approximately Correct (PAC) bounds. In this paper, we derive a PAC bound for stable continuous-time linear parameter-varying (LPV) systems. Our bound depends on the H2 norm of the chosen class of the LPV systems, but does not depend on the time interval for which the signals are considered.
Create account to get full access
Overview
- This research paper presents a finite-sample generalization bound for stable Linear Parameter-Varying (LPV) systems.
- LPV systems are a type of dynamic system where the system parameters vary with an external time-varying parameter, known as the scheduling parameter.
- The authors derive a generalization bound that quantifies the difference between the true and empirical risk of an LPV system, providing a guarantee on the system's performance.
- This bound is useful for understanding the sample complexity of learning LPV systems and can help with designing robust control strategies.
Plain English Explanation
In this paper, the researchers looked at a specific type of dynamic system called a Linear Parameter-Varying (LPV) system. LPV systems are different from regular linear systems because their parameters can change over time depending on an external factor, called the scheduling parameter.
The researchers wanted to understand how well an LPV system can be learned from a finite number of samples, or observations. They derived a mathematical bound that tells us how different the system's true performance is from the performance we estimate based on the samples we've seen. This bound gives us a guarantee on how well the system will perform, even if we haven't seen every possible situation.
Understanding this type of bound is important because it can help us design better control systems for LPV systems. If we know the bound, we can make sure the system will perform well even in situations we haven't encountered before. This is especially useful for safety-critical applications, where we want to be confident the system will behave as expected.
The key ideas in this paper are the mathematical techniques used to derive the generalization bound and the insight that such a bound can be useful for designing robust control strategies for LPV systems. The results provide a way to quantify the sample complexity of learning LPV systems, which is an important step towards understanding generalization in the interpolation regime.
Technical Explanation
The authors consider a class of stable LPV systems, where the system parameters vary linearly with a scheduling parameter. They derive a finite-sample generalization bound that quantifies the difference between the true risk (the system's actual performance) and the empirical risk (the performance estimated from the samples).
The key technical contributions are:
- Defining a suitable notion of complexity for the class of LPV systems, based on the system's impulse response and the variation in the scheduling parameter.
- Bounding the Rademacher complexity of the class of LPV systems, which serves as a measure of the system's complexity.
- Applying concentration inequalities to derive a high-probability bound on the generalization error.
The generalization bound obtained by the authors depends on the number of samples, the system's complexity, and the system's stability properties. This bound can be used to understand the sample complexity of learning LPV systems and to design robust control strategies that account for the system's uncertainty.
Critical Analysis
The paper provides a rigorous mathematical analysis of the generalization properties of stable LPV systems, which is a valuable contribution to the literature. However, there are a few potential limitations and areas for further research:
- The analysis assumes the system is linear in the scheduling parameter, which may not always be the case in practice. Extending the results to more general classes of LPV systems would be an interesting direction.
- The bound depends on the system's impulse response and the variation in the scheduling parameter, which may be difficult to estimate in some real-world scenarios. Exploring data-driven methods to bound these quantities could make the results more practical.
- The paper focuses on the generalization performance of LPV systems, but does not address the problem of learning the system parameters from data. Combining this generalization analysis with system identification techniques could lead to a more comprehensive framework for learning LPV systems.
Overall, the paper presents a solid theoretical foundation for understanding the sample complexity of LPV systems and provides a useful tool for designing robust control strategies. Further research to address the limitations mentioned could enhance the applicability of the results in real-world settings.
Conclusion
This research paper introduces a finite-sample generalization bound for stable Linear Parameter-Varying (LPV) systems, which quantifies the difference between the true and empirical risk of an LPV system. The derived bound provides a guarantee on the system's performance and can be used to understand the sample complexity of learning LPV systems.
The key contributions of this work include the mathematical techniques used to derive the generalization bound and the insight that such a bound can be useful for designing robust control strategies for LPV systems. The results represent an important step towards understanding generalization in the interpolation regime and can help guide the design of control systems for safety-critical applications involving LPV systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
Uniform Generalization Bounds on Data-Dependent Hypothesis Sets via PAC-Bayesian Theory on Random Sets
Benjamin Dupuis, Paul Viallard, George Deligiannidis, Umut Simsekli
0
0
We propose data-dependent uniform generalization bounds by approaching the problem from a PAC-Bayesian perspective. We first apply the PAC-Bayesian framework on `random sets' in a rigorous way, where the training algorithm is assumed to output a data-dependent hypothesis set after observing the training data. This approach allows us to prove data-dependent bounds, which can be applicable in numerous contexts. To highlight the power of our approach, we consider two main applications. First, we propose a PAC-Bayesian formulation of the recently developed fractal-dimension-based generalization bounds. The derived results are shown to be tighter and they unify the existing results around one simple proof technique. Second, we prove uniform bounds over the trajectories of continuous Langevin dynamics and stochastic gradient Langevin dynamics. These results provide novel information about the generalization properties of noisy algorithms.
4/29/2024
PAC-Chernoff Bounds: Understanding Generalization in the Interpolation Regime
Andr'es R. Masegosa, Luis A. Ortega
0
0
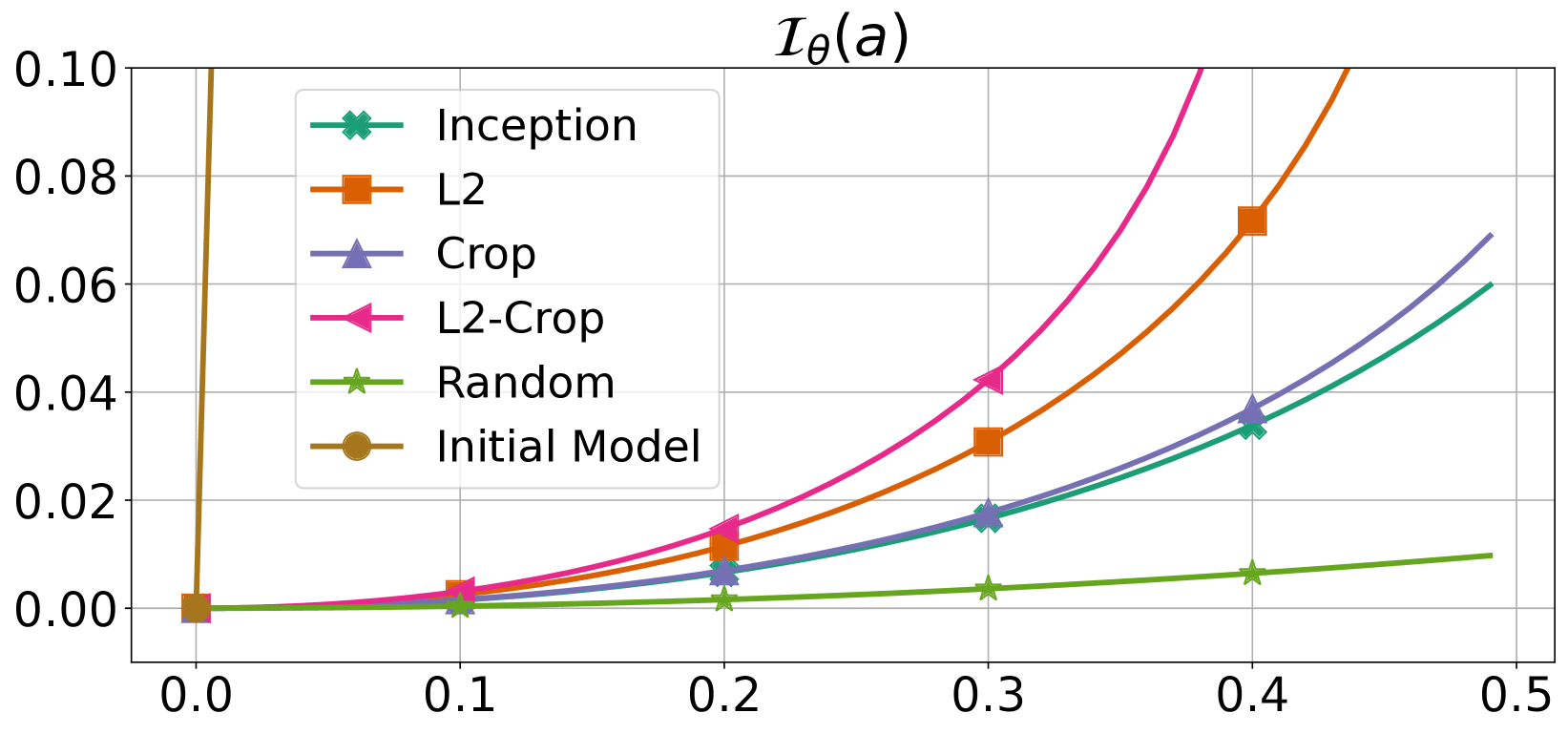
This paper introduces a distribution-dependent PAC-Chernoff bound that exhibits perfect tightness for interpolators, even within over-parameterized model classes. This bound, which relies on basic principles of Large Deviation Theory, defines a natural measure of the smoothness of a model, characterized by simple real-valued functions. Building upon this bound and the new concept of smoothness, we present an unified theoretical framework revealing why certain interpolators show an exceptional generalization, while others falter. We theoretically show how a wide spectrum of modern learning methodologies, encompassing techniques such as $ell_2$-norm, distance-from-initialization and input-gradient regularization, in combination with data augmentation, invariant architectures, and over-parameterization, collectively guide the optimizer toward smoother interpolators, which, according to our theoretical framework, are the ones exhibiting superior generalization performance. This study shows that distribution-dependent bounds serve as a powerful tool to understand the complex dynamics behind the generalization capabilities of over-parameterized interpolators.
4/30/2024
🌿
Estimation Sample Complexity of a Class of Nonlinear Continuous-time Systems
Simon Kuang, Xinfan Lin
0
0
We present a method of parameter estimation for large class of nonlinear systems, namely those in which the state consists of output derivatives and the flow is linear in the parameter. The method, which solves for the unknown parameter by directly inverting the dynamics using regularized linear regression, is based on new design and analysis ideas for differentiation filtering and regularized least squares. Combined in series, they yield a novel finite-sample bound on mean absolute error of estimation.
4/24/2024
🎲
Generalization bounds for mixing processes via delayed online-to-PAC conversions
Baptiste Abeles, Eugenio Clerico, Gergely Neu
0
0
We study the generalization error of statistical learning algorithms in a non-i.i.d. setting, where the training data is sampled from a stationary mixing process. We develop an analytic framework for this scenario based on a reduction to online learning with delayed feedback. In particular, we show that the existence of an online learning algorithm with bounded regret (against a fixed statistical learning algorithm in a specially constructed game of online learning with delayed feedback) implies low generalization error of said statistical learning method even if the data sequence is sampled from a mixing time series. The rates demonstrate a trade-off between the amount of delay in the online learning game and the degree of dependence between consecutive data points, with near-optimal rates recovered in a number of well-studied settings when the delay is tuned appropriately as a function of the mixing time of the process.
6/19/2024