FlatFusion: Delving into Details of Sparse Transformer-based Camera-LiDAR Fusion for Autonomous Driving

0

Sign in to get full access
Overview
- The paper presents FlatFusion, a sparse Transformer-based camera-LiDAR fusion approach for autonomous driving.
- It explores the intricacies of fusing sparse LiDAR data with dense camera information to enable accurate 3D object detection and semantic segmentation.
- The proposed method aims to bridge the gap between the two sensor modalities, leveraging their complementary strengths.
Plain English Explanation
FlatFusion is a new method that combines information from two important sensors used in self-driving cars: cameras and LiDAR. Cameras capture detailed visual information, while LiDAR provides precise 3D measurements. By bringing these two data sources together, FlatFusion can create a more complete understanding of the environment around the vehicle.
The key innovation in FlatFusion is its use of a Transformer-based architecture. Transformers are a type of neural network that can effectively capture complex relationships between different parts of the input data. In the context of sensor fusion, Transformers allow FlatFusion to seamlessly integrate the sparse LiDAR points with the dense camera imagery, extracting the most useful information from each.
This fusion of camera and LiDAR data enables FlatFusion to perform two crucial tasks for autonomous driving: 3D object detection (identifying and locating vehicles, pedestrians, etc.) and semantic segmentation (classifying every pixel in the scene into meaningful categories like road, building, etc.). By excelling at these tasks, FlatFusion can help self-driving cars better understand and navigate their surroundings.
Technical Explanation
The core of FlatFusion is a Transformer-based fusion module that takes in sparse LiDAR points and dense camera features and produces a unified representation. This module consists of several key components:
- LiDAR Encoder: This sub-network processes the raw LiDAR points, extracting relevant features and encoding them into a compact representation.
- Camera Encoder: This sub-network operates on the dense camera features, also producing a compact encoding.
- Fusion Transformer: The Transformer layer fuses the LiDAR and camera encodings, learning how to effectively combine the complementary information from the two sensors.
The fused representation is then used for both 3D object detection and semantic segmentation tasks. For detection, FlatFusion employs a detection head that outputs bounding boxes and associated class probabilities. For segmentation, a segmentation head classifies each pixel in the scene.
The authors evaluate FlatFusion on several benchmark datasets for autonomous driving, demonstrating state-of-the-art performance on both 3D object detection and semantic segmentation. The results highlight the effectiveness of the Transformer-based fusion approach in bridging the gap between sparse LiDAR and dense camera data.
Critical Analysis
The paper provides a thorough technical description of the FlatFusion architecture and its key components. The authors have clearly put significant effort into designing and evaluating the fusion approach.
One potential limitation is the reliance on the Transformer architecture, which, while powerful, can be computationally expensive. The authors do not explicitly address the scalability and real-time performance of FlatFusion, which would be crucial for practical deployment in autonomous vehicles.
Additionally, the paper does not delve into the interpretability of the Transformer-based fusion process. It would be valuable to understand how the model is making decisions and what specific cues it is leveraging from the camera and LiDAR data.
Further research could explore ways to make the fusion process more efficient and transparent, potentially by incorporating additional inductive biases or using alternative fusion strategies. Investigating the generalization capabilities of FlatFusion across diverse driving environments and sensor configurations would also be a valuable direction.
Conclusion
The FlatFusion paper presents a novel Transformer-based approach for fusing sparse LiDAR data with dense camera information, enabling accurate 3D object detection and semantic segmentation for autonomous driving. The authors have demonstrated the effectiveness of their method on benchmark datasets, showcasing its potential to enhance the environmental understanding of self-driving cars.
While the technical details are well-explained, further work is needed to address the scalability and interpretability of the fusion process. Nonetheless, FlatFusion represents an important step forward in bridging the gap between complementary sensor modalities, paving the way for more robust and reliable autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FlatFusion: Delving into Details of Sparse Transformer-based Camera-LiDAR Fusion for Autonomous Driving
Yutao Zhu, Xiaosong Jia, Xinyu Yang, Junchi Yan
The integration of data from diverse sensor modalities (e.g., camera and LiDAR) constitutes a prevalent methodology within the ambit of autonomous driving scenarios. Recent advancements in efficient point cloud transformers have underscored the efficacy of integrating information in sparse formats. When it comes to fusion, since image patches are dense in pixel space with ambiguous depth, it necessitates additional design considerations for effective fusion. In this paper, we conduct a comprehensive exploration of design choices for Transformer-based sparse cameraLiDAR fusion. This investigation encompasses strategies for image-to-3D and LiDAR-to-2D mapping, attention neighbor grouping, single modal tokenizer, and micro-structure of Transformer. By amalgamating the most effective principles uncovered through our investigation, we introduce FlatFusion, a carefully designed framework for sparse camera-LiDAR fusion. Notably, FlatFusion significantly outperforms state-of-the-art sparse Transformer-based methods, including UniTR, CMT, and SparseFusion, achieving 73.7 NDS on the nuScenes validation set with 10.1 FPS with PyTorch.
Read more8/14/2024
0
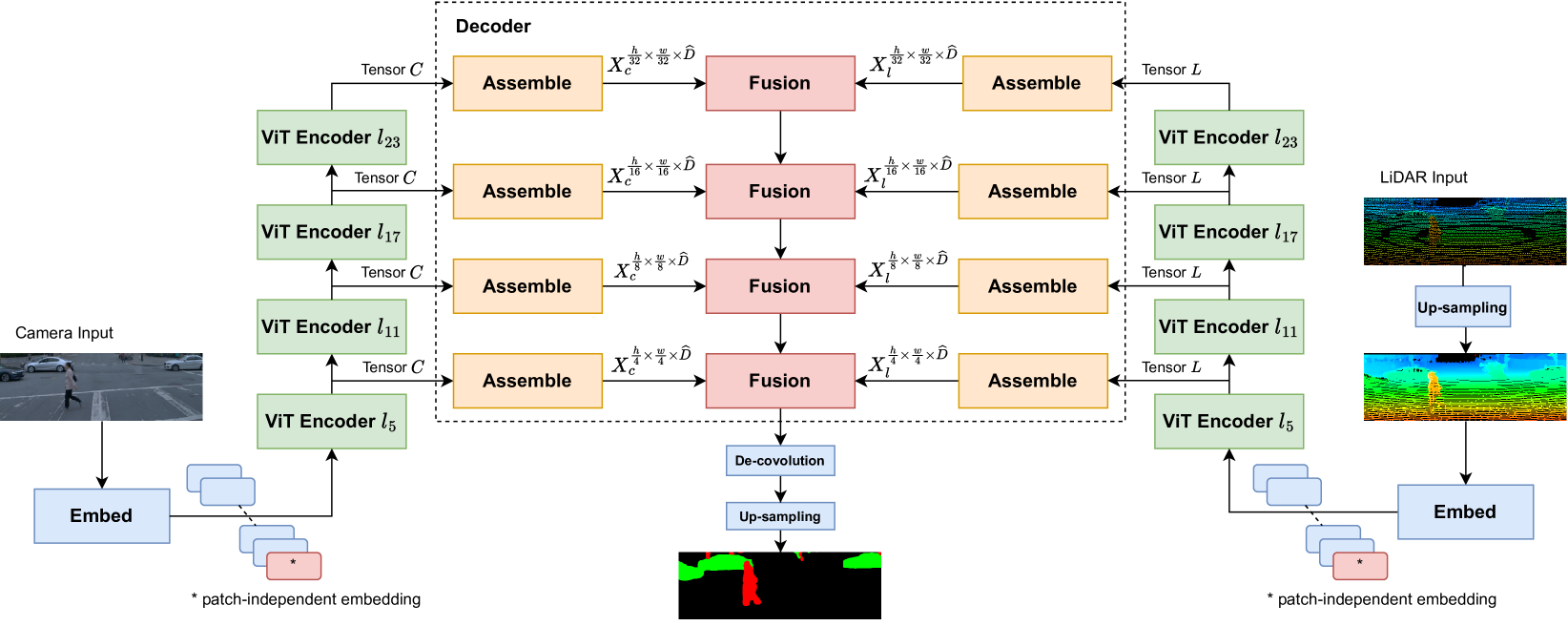
CLFT: Camera-LiDAR Fusion Transformer for Semantic Segmentation in Autonomous Driving
Junyi Gu, Mauro Bellone, Tom'av{s} Pivov{n}ka, Raivo Sell
Critical research about camera-and-LiDAR-based semantic object segmentation for autonomous driving significantly benefited from the recent development of deep learning. Specifically, the vision transformer is the novel ground-breaker that successfully brought the multi-head-attention mechanism to computer vision applications. Therefore, we propose a vision-transformer-based network to carry out camera-LiDAR fusion for semantic segmentation applied to autonomous driving. Our proposal uses the novel progressive-assemble strategy of vision transformers on a double-direction network and then integrates the results in a cross-fusion strategy over the transformer decoder layers. Unlike other works in the literature, our camera-LiDAR fusion transformers have been evaluated in challenging conditions like rain and low illumination, showing robust performance. The paper reports the segmentation results over the vehicle and human classes in different modalities: camera-only, LiDAR-only, and camera-LiDAR fusion. We perform coherent controlled benchmark experiments of CLFT against other networks that are also designed for semantic segmentation. The experiments aim to evaluate the performance of CLFT independently from two perspectives: multimodal sensor fusion and backbone architectures. The quantitative assessments show our CLFT networks yield an improvement of up to 10% for challenging dark-wet conditions when comparing with Fully-Convolutional-Neural-Network-based (FCN) camera-LiDAR fusion neural network. Contrasting to the network with transformer backbone but using single modality input, the all-around improvement is 5-10%.
Read more9/10/2024
🔎
0
Fully Sparse Fusion for 3D Object Detection
Yingyan Li, Lue Fan, Yang Liu, Zehao Huang, Yuntao Chen, Naiyan Wang, Zhaoxiang Zhang
Currently prevalent multimodal 3D detection methods are built upon LiDAR-based detectors that usually use dense Bird's-Eye-View (BEV) feature maps. However, the cost of such BEV feature maps is quadratic to the detection range, making it not suitable for long-range detection. Fully sparse architecture is gaining attention as they are highly efficient in long-range perception. In this paper, we study how to effectively leverage image modality in the emerging fully sparse architecture. Particularly, utilizing instance queries, our framework integrates the well-studied 2D instance segmentation into the LiDAR side, which is parallel to the 3D instance segmentation part in the fully sparse detector. This design achieves a uniform query-based fusion framework in both the 2D and 3D sides while maintaining the fully sparse characteristic. Extensive experiments showcase state-of-the-art results on the widely used nuScenes dataset and the long-range Argoverse 2 dataset. Notably, the inference speed of the proposed method under the long-range LiDAR perception setting is 2.7 $times$ faster than that of other state-of-the-art multimodal 3D detection methods. Code will be released at url{https://github.com/BraveGroup/FullySparseFusion}.
Read more4/30/2024

0
Lift-Attend-Splat: Bird's-eye-view camera-lidar fusion using transformers
James Gunn, Zygmunt Lenyk, Anuj Sharma, Andrea Donati, Alexandru Buburuzan, John Redford, Romain Mueller
Combining complementary sensor modalities is crucial to providing robust perception for safety-critical robotics applications such as autonomous driving (AD). Recent state-of-the-art camera-lidar fusion methods for AD rely on monocular depth estimation which is a notoriously difficult task compared to using depth information from the lidar directly. Here, we find that this approach does not leverage depth as expected and show that naively improving depth estimation does not lead to improvements in object detection performance. Strikingly, we also find that removing depth estimation altogether does not degrade object detection performance substantially, suggesting that relying on monocular depth could be an unnecessary architectural bottleneck during camera-lidar fusion. In this work, we introduce a novel fusion method that bypasses monocular depth estimation altogether and instead selects and fuses camera and lidar features in a bird's-eye-view grid using a simple attention mechanism. We show that our model can modulate its use of camera features based on the availability of lidar features and that it yields better 3D object detection on the nuScenes dataset than baselines relying on monocular depth estimation.
Read more5/22/2024