A flexible framework for accurate LiDAR odometry, map manipulation, and localization

0

Sign in to get full access
Overview
- Presents a flexible framework for accurate LiDAR odometry, map manipulation, and localization
- Designed to be robust and versatile, supporting a wide range of applications and environments
- Leverages the strengths of different sensors and algorithms to deliver high-performance results
Plain English Explanation
The paper describes a comprehensive framework that can accurately track the movement of a LiDAR sensor (LiDAR odometry), build detailed maps of its surroundings (map manipulation), and determine the sensor's location within those maps (localization). This framework is designed to be flexible and versatile, meaning it can work well in a variety of different settings and applications, from underground mines to office buildings.
The key to the framework's performance is its ability to effectively combine data from different sensors, such as LiDAR and inertial measurement units (IMUs), and leverage a range of algorithms to extract the most accurate and reliable information. This allows the system to adapt to different environments and overcome the limitations of any single sensor or algorithm.
By providing a comprehensive and flexible solution for LiDAR-based spatial awareness, this framework has the potential to enable a wide range of applications, from autonomous navigation and mapping to augmented reality and beyond.
Technical Explanation
The paper presents a flexible framework for accurate LiDAR odometry, map manipulation, and localization. The framework is designed to be robust and versatile, supporting a wide range of applications and environments by leveraging the strengths of different sensors and algorithms.
At the core of the framework is a LiDAR odometry module that tracks the movement of the LiDAR sensor over time, using techniques such as Iterative Closest Point (ICP) and constraints from other sensors like IMUs. This allows the system to accurately estimate the sensor's trajectory and orientation.
The framework also includes a map manipulation module that can build detailed 3D maps of the environment using the LiDAR data. These maps can be dynamically updated and refined as new information is acquired, enabling the system to adapt to changes in the environment.
Finally, the framework provides a localization module that can determine the sensor's precise location within the mapped environment. This is achieved by registering the current LiDAR scans against the existing map, leveraging techniques like Consistent Lightweight Incremental Mapping (CLOI-Mapper).
The authors demonstrate the framework's performance and versatility through extensive experiments in diverse environments, including underground mines, construction sites, and office buildings. The results show that the framework can deliver accurate and robust odometry, mapping, and localization, outperforming state-of-the-art approaches.
Critical Analysis
The paper presents a comprehensive and well-designed framework that addresses the key challenges of LiDAR-based spatial awareness. The authors have carefully considered the limitations of individual sensors and algorithms, and have developed a flexible system that can adapt to different environments and applications.
One potential limitation of the framework is its reliance on precise sensor calibration and initialization. While the authors have addressed this to some extent, it may still be a concern in real-world deployments where sensor configurations can change over time or vary across different platforms.
Additionally, the framework's performance may be sensitive to the quality and availability of the LiDAR data, as well as any environmental factors that could affect its reliability, such as lighting conditions or dynamic obstacles. Further research may be needed to explore the framework's robustness in more challenging scenarios.
Overall, the paper presents a compelling and innovative approach to LiDAR-based spatial awareness, with the potential to enable a wide range of applications. By encouraging readers to think critically about the research and its implications, the authors have made a valuable contribution to the field.
Conclusion
The flexible framework described in this paper represents a significant step forward in the field of LiDAR-based odometry, mapping, and localization. By leveraging the strengths of various sensors and algorithms, the framework is able to deliver accurate and robust spatial awareness in a wide range of environments and applications.
The framework's versatility and adaptability make it a promising solution for a variety of use cases, from autonomous navigation and mapping to augmented reality and beyond. As the authors have demonstrated, the framework can effectively handle the challenges posed by different environments, from underground mines to office buildings, suggesting its potential for widespread adoption and impact.
Moving forward, further research and development may be needed to address the framework's sensitivity to sensor quality and environmental factors, as well as to explore its integration with other technologies, such as visual and inertial sensors, for even more comprehensive spatial understanding. Nevertheless, the ideas and approaches presented in this paper represent an important contribution to the ongoing efforts to unlock the full potential of LiDAR-based spatial awareness.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A flexible framework for accurate LiDAR odometry, map manipulation, and localization
Jos'e Luis Blanco-Claraco
LiDAR-based SLAM is a core technology for autonomous vehicles and robots. Despite the intense research activity in this field, each proposed system uses a particular sensor post-processing pipeline and a single map representation format. The present work aims at introducing a revolutionary point of view for 3D LiDAR SLAM and localization: (1) using view-based maps as the fundamental representation of maps (simple-maps), which can then be used to generate arbitrary metric maps optimized for particular tasks; and (2) by introducing a new framework in which mapping pipelines can be defined without coding, defining the connections of a network of reusable blocks much like deep-learning networks are designed by connecting layers of standardized elements. Moreover, the idea of including the current linear and angular velocity vectors as variables to be optimized within the ICP loop is also introduced, leading to superior robustness against aggressive motion profiles without an IMU. The presented open-source ecosystem, released to ROS 2, includes tools and prebuilt pipelines covering all the way from data acquisition to map editing and visualization, real-time localization, loop-closure detection, or map georeferencing from consumer-grade GNSS receivers. Extensive experimental validation reveals that the proposal compares well to, or improves, former state-of-the-art (SOTA) LiDAR odometry systems, while also successfully mapping some hard sequences where others diverge. A proposed self-adaptive configuration has been used, without parameter changes, for all 3D LiDAR datasets with sensors between 16 and 128 rings, extensively tested on 83 sequences over more than 250~km of automotive, hand-held, airborne, and quadruped LiDAR datasets, both indoors and outdoors. The open-sourced implementation is available online at https://github.com/MOLAorg/mola
Read more7/31/2024

0
From Underground Mines to Offices: A Versatile and Robust Framework for Range-Inertial SLAM
Lorenzo Montano-Oliv'an, Julio A. Placed, Luis Montano, Mar'ia T. L'azaro
Simultaneous Localization and Mapping (SLAM) is an essential component of autonomous robotic applications and self-driving vehicles, enabling them to understand and operate in their environment. Many SLAM systems have been proposed in the last decade, but they are often complex to adapt to different settings or sensor setups. In this work, we present LiDAR Graph-SLAM (LG-SLAM), a versatile range-inertial SLAM framework that can be adapted to different types of sensors and environments, from underground mines to offices with minimal parameter tuning. Our system integrates range, inertial and GNSS measurements into a graph-based optimization framework. We also use a refined submap management approach and a robust loop closure method that effectively accounts for uncertainty in the identification and validation of putative loop closures, ensuring global consistency and robustness. Enabled by a parallelized architecture and GPU integration, our system achieves pose estimation at LiDAR frame rate, along with online loop closing and graph optimization. We validate our system in diverse environments using public datasets and real-world data, consistently achieving an average error below 20 cm and outperforming other state-of-the-art algorithms.
Read more7/23/2024

0
2DLIW-SLAM:2D LiDAR-Inertial-Wheel Odometry with Real-Time Loop Closure
Bin Zhang, Zexin Peng, Bi Zeng, Junjie Lu
Due to budgetary constraints, indoor navigation typically employs 2D LiDAR rather than 3D LiDAR. However, the utilization of 2D LiDAR in Simultaneous Localization And Mapping (SLAM) frequently encounters challenges related to motion degeneracy, particularly in geometrically similar environments. To address this problem, this paper proposes a robust, accurate, and multi-sensor-fused 2D LiDAR SLAM system specifically designed for indoor mobile robots. To commence, the original LiDAR data undergoes meticulous processing through point and line extraction. Leveraging the distinctive characteristics of indoor environments, line-line constraints are established to complement other sensor data effectively, thereby augmenting the overall robustness and precision of the system. Concurrently, a tightly-coupled front-end is created, integrating data from the 2D LiDAR, IMU, and wheel odometry, thus enabling real-time state estimation. Building upon this solid foundation, a novel global feature point matching-based loop closure detection algorithm is proposed. This algorithm proves highly effective in mitigating front-end accumulated errors and ultimately constructs a globally consistent map. The experimental results indicate that our system fully meets real-time requirements. When compared to Cartographer, our system not only exhibits lower trajectory errors but also demonstrates stronger robustness, particularly in degeneracy problem.
Read more4/24/2024
0
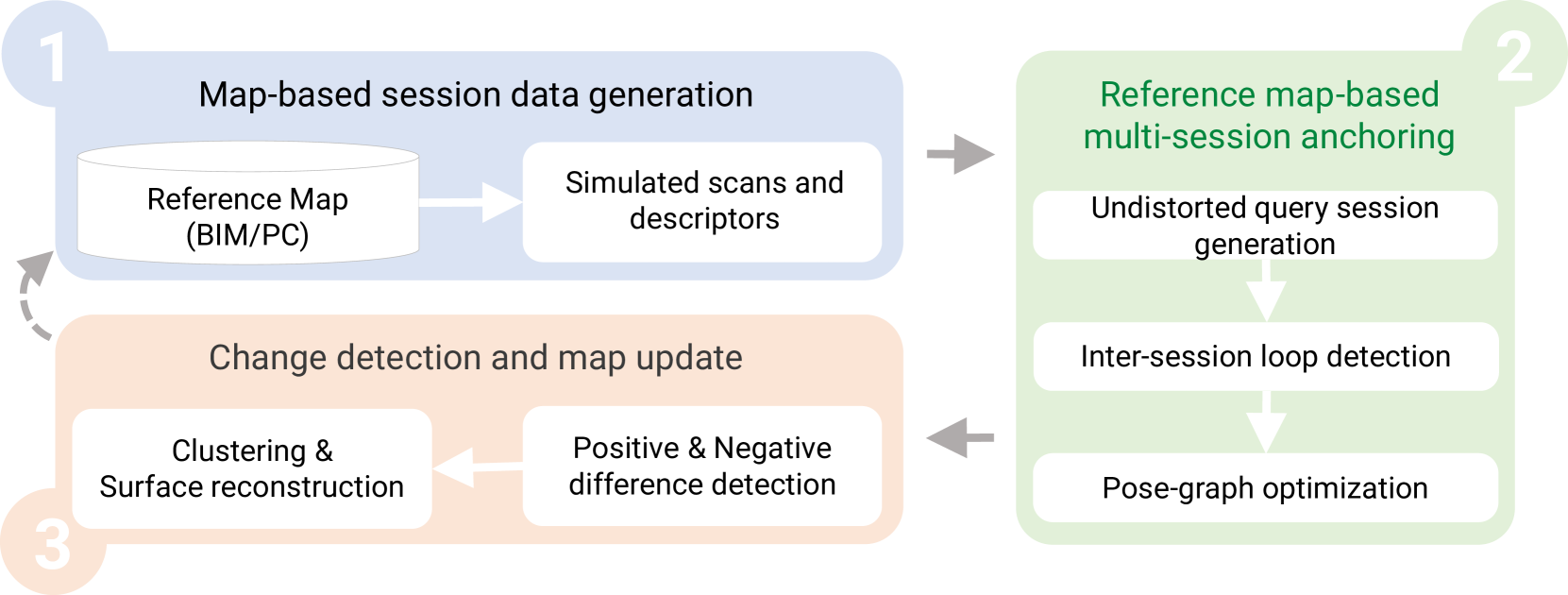
SLAM2REF: Advancing Long-Term Mapping with 3D LiDAR and Reference Map Integration for Precise 6-DoF Trajectory Estimation and Map Extension
Miguel Arturo Vega Torres, Alexander Braun, Andr'e Borrmann
This paper presents a pioneering solution to the task of integrating mobile 3D LiDAR and inertial measurement unit (IMU) data with existing building information models or point clouds, which is crucial for achieving precise long-term localization and mapping in indoor, GPS-denied environments. Our proposed framework, SLAM2REF, introduces a novel approach for automatic alignment and map extension utilizing reference 3D maps. The methodology is supported by a sophisticated multi-session anchoring technique, which integrates novel descriptors and registration methodologies. Real-world experiments reveal the framework's remarkable robustness and accuracy, surpassing current state-of-the-art methods. Our open-source framework's significance lies in its contribution to resilient map data management, enhancing processes across diverse sectors such as construction site monitoring, emergency response, disaster management, and others, where fast-updated digital 3D maps contribute to better decision-making and productivity. Moreover, it offers advancements in localization and mapping research. Link to the repository: https://github.com/MigVega/SLAM2REF, Data: https://doi.org/10.14459/2024mp1743877.
Read more8/29/2024