SLAM2REF: Advancing Long-Term Mapping with 3D LiDAR and Reference Map Integration for Precise 6-DoF Trajectory Estimation and Map Extension

0
Sign in to get full access
Overview
- SLAM2REF is a system for long-term 3D mapping that integrates 3D LiDAR data with reference maps to improve 6-DoF trajectory estimation and map extension.
- It addresses challenges of long-term mapping, such as sensor drift and changing environments, by combining real-time sensor data with pre-existing reference maps.
- The system can precisely localize the robot in the environment and extend the map over multiple sessions, making it suitable for applications like autonomous navigation.
Plain English Explanation
SLAM2REF is a system that helps robots build detailed 3D maps of their surroundings over long periods of time. One of the challenges with long-term mapping is that the robot's sensors can become less accurate over time, causing the map to drift or become out of sync with the real world.
SLAM2REF solves this by not only using the robot's own sensor data, but also integrating it with pre-existing "reference" maps. These reference maps provide additional information that helps the robot stay precisely localized within the environment, even as things change over time.
By combining real-time sensor data with the reference maps, SLAM2REF can create highly accurate 6-degree-of-freedom (6-DoF) trajectories of the robot's movements. It can also extend the map over multiple mapping sessions, allowing the robot to build up a comprehensive 3D model of its surroundings.
This makes SLAM2REF well-suited for applications like autonomous navigation, where the robot needs to be able to precisely localize itself and understand its environment in order to safely navigate. The combination of real-time sensor data and reference maps gives the robot a robust and reliable way to maintain an accurate map over long periods of time.
Technical Explanation
SLAM2REF is a SLAM (Simultaneous Localization and Mapping) system that leverages 3D LiDAR sensors and reference maps to improve long-term 6-DoF trajectory estimation and map extension.
The key components of the SLAM2REF system are:
-
LiDAR-based SLAM: SLAM2REF uses a LiDAR sensor to build a real-time 3D map of the environment. This provides detailed spatial information that can be used for localization and mapping.
-
Reference Map Integration: In addition to the real-time LiDAR data, SLAM2REF integrates pre-existing reference maps of the environment. These reference maps provide additional geometric and semantic information that helps constrain the robot's trajectory and improve localization accuracy.
-
Precise 6-DoF Trajectory Estimation: By fusing the LiDAR data with the reference maps, SLAM2REF can estimate the robot's 6-degree-of-freedom (6-DoF) pose with high precision. This includes the robot's position and orientation in 3D space.
-
Map Extension: SLAM2REF can extend the 3D map over multiple mapping sessions, allowing the robot to build up a comprehensive representation of its surroundings. This is enabled by the robust localization provided by the reference map integration.
The researchers evaluated SLAM2REF on several real-world datasets, demonstrating its ability to outperform traditional SLAM approaches in terms of trajectory estimation accuracy and map consistency over long-term operations.
Critical Analysis
The SLAM2REF paper makes a compelling case for the benefits of integrating 3D LiDAR data with reference maps for long-term mapping and localization. However, the paper does not address some potential limitations or areas for further research:
-
Dependency on Reference Maps: SLAM2REF's performance is heavily dependent on the availability and quality of the reference maps. In environments where such maps are not readily available, the system's effectiveness may be reduced.
-
Computational Complexity: Integrating the reference maps with the real-time LiDAR data may increase the computational load on the robot's systems, potentially limiting its deployment in resource-constrained scenarios.
-
Dynamic Environments: The paper does not extensively discuss how SLAM2REF handles changes in the environment over time, such as the addition or removal of objects. Further research may be needed to ensure the system's robustness in dynamic settings.
-
Scalability: While the paper demonstrates SLAM2REF's performance on several datasets, it is unclear how the system would scale to larger or more complex environments. Evaluating its performance in diverse real-world scenarios would be beneficial.
Despite these potential limitations, SLAM2REF represents an important step forward in the field of long-term 3D mapping and localization, offering a promising approach to address the challenges of sensor drift and changing environments.
Conclusion
The SLAM2REF system presents a novel approach to long-term 3D mapping by integrating 3D LiDAR data with pre-existing reference maps. This integration allows for precise 6-DoF trajectory estimation and map extension, making SLAM2REF a valuable tool for applications such as autonomous navigation.
While the paper highlights the system's strengths, it also suggests areas for further research and development, such as reducing reliance on reference maps, improving computational efficiency, and handling dynamic environments. Overall, SLAM2REF represents a significant advancement in the field of long-term 3D mapping and serves as a solid foundation for future work in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SLAM2REF: Advancing Long-Term Mapping with 3D LiDAR and Reference Map Integration for Precise 6-DoF Trajectory Estimation and Map Extension
Miguel Arturo Vega Torres, Alexander Braun, Andr'e Borrmann
This paper presents a pioneering solution to the task of integrating mobile 3D LiDAR and inertial measurement unit (IMU) data with existing building information models or point clouds, which is crucial for achieving precise long-term localization and mapping in indoor, GPS-denied environments. Our proposed framework, SLAM2REF, introduces a novel approach for automatic alignment and map extension utilizing reference 3D maps. The methodology is supported by a sophisticated multi-session anchoring technique, which integrates novel descriptors and registration methodologies. Real-world experiments reveal the framework's remarkable robustness and accuracy, surpassing current state-of-the-art methods. Our open-source framework's significance lies in its contribution to resilient map data management, enhancing processes across diverse sectors such as construction site monitoring, emergency response, disaster management, and others, where fast-updated digital 3D maps contribute to better decision-making and productivity. Moreover, it offers advancements in localization and mapping research. Link to the repository: https://github.com/MigVega/SLAM2REF, Data: https://doi.org/10.14459/2024mp1743877.
Read more8/29/2024
👁️
0
BIM-SLAM: Integrating BIM Models in Multi-session SLAM for Lifelong Mapping using 3D LiDAR
Miguel Arturo Vega Torres, Alexander Braun, Andr'e Borrmann
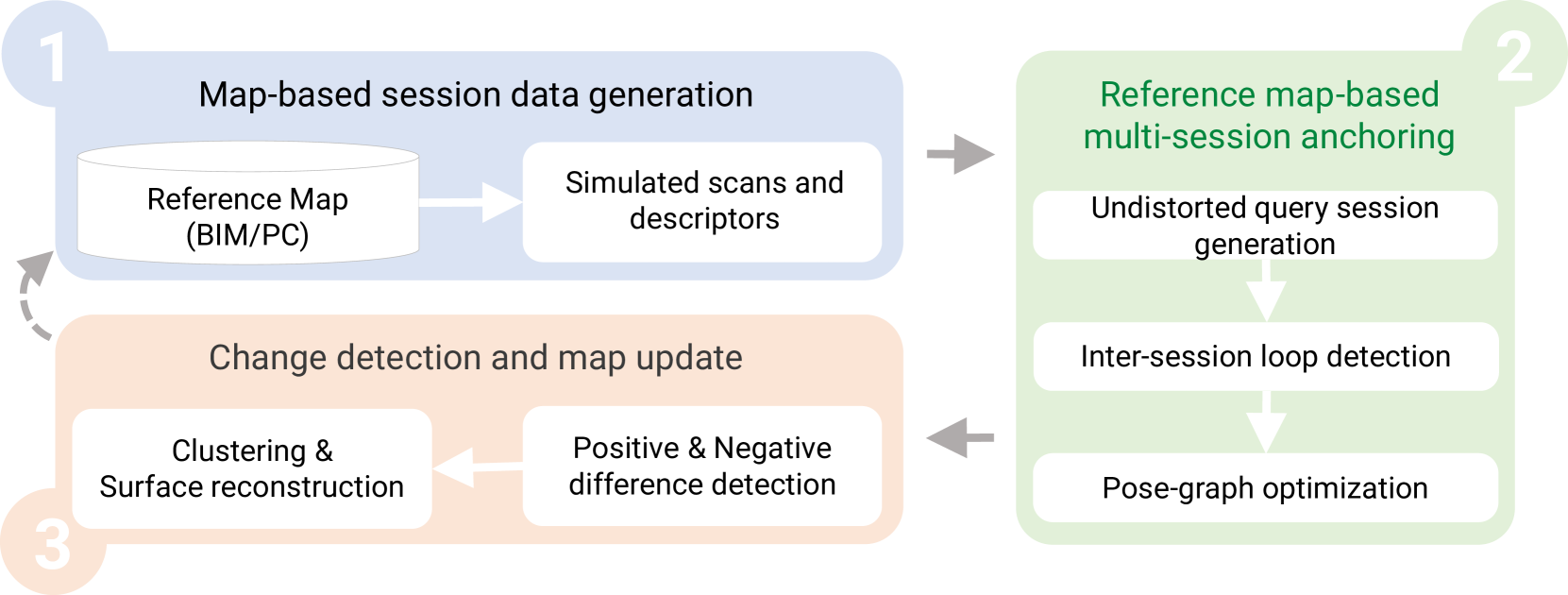
While 3D LiDAR sensor technology is becoming more advanced and cheaper every day, the growth of digitalization in the AEC industry contributes to the fact that 3D building information models (BIM models) are now available for a large part of the built environment. These two facts open the question of how 3D models can support 3D LiDAR long-term SLAM in indoor, GPS-denied environments. This paper proposes a methodology that leverages BIM models to create an updated map of indoor environments with sequential LiDAR measurements. Session data (pose graph-based map and descriptors) are initially generated from BIM models. Then, real-world data is aligned with the session data from the model using multi-session anchoring while minimizing the drift on the real-world data. Finally, the new elements not present in the BIM model are identified, grouped, and reconstructed in a surface representation, allowing a better visualization next to the BIM model. The framework enables the creation of a coherent map aligned with the BIM model that does not require prior knowledge of the initial pose of the robot, and it does not need to be inside the map.
Read more8/29/2024

0
A flexible framework for accurate LiDAR odometry, map manipulation, and localization
Jos'e Luis Blanco-Claraco
LiDAR-based SLAM is a core technology for autonomous vehicles and robots. Despite the intense research activity in this field, each proposed system uses a particular sensor post-processing pipeline and a single map representation format. The present work aims at introducing a revolutionary point of view for 3D LiDAR SLAM and localization: (1) using view-based maps as the fundamental representation of maps (simple-maps), which can then be used to generate arbitrary metric maps optimized for particular tasks; and (2) by introducing a new framework in which mapping pipelines can be defined without coding, defining the connections of a network of reusable blocks much like deep-learning networks are designed by connecting layers of standardized elements. Moreover, the idea of including the current linear and angular velocity vectors as variables to be optimized within the ICP loop is also introduced, leading to superior robustness against aggressive motion profiles without an IMU. The presented open-source ecosystem, released to ROS 2, includes tools and prebuilt pipelines covering all the way from data acquisition to map editing and visualization, real-time localization, loop-closure detection, or map georeferencing from consumer-grade GNSS receivers. Extensive experimental validation reveals that the proposal compares well to, or improves, former state-of-the-art (SOTA) LiDAR odometry systems, while also successfully mapping some hard sequences where others diverge. A proposed self-adaptive configuration has been used, without parameter changes, for all 3D LiDAR datasets with sensors between 16 and 128 rings, extensively tested on 83 sequences over more than 250~km of automotive, hand-held, airborne, and quadruped LiDAR datasets, both indoors and outdoors. The open-sourced implementation is available online at https://github.com/MOLAorg/mola
Read more7/31/2024

0
From Underground Mines to Offices: A Versatile and Robust Framework for Range-Inertial SLAM
Lorenzo Montano-Oliv'an, Julio A. Placed, Luis Montano, Mar'ia T. L'azaro
Simultaneous Localization and Mapping (SLAM) is an essential component of autonomous robotic applications and self-driving vehicles, enabling them to understand and operate in their environment. Many SLAM systems have been proposed in the last decade, but they are often complex to adapt to different settings or sensor setups. In this work, we present LiDAR Graph-SLAM (LG-SLAM), a versatile range-inertial SLAM framework that can be adapted to different types of sensors and environments, from underground mines to offices with minimal parameter tuning. Our system integrates range, inertial and GNSS measurements into a graph-based optimization framework. We also use a refined submap management approach and a robust loop closure method that effectively accounts for uncertainty in the identification and validation of putative loop closures, ensuring global consistency and robustness. Enabled by a parallelized architecture and GPU integration, our system achieves pose estimation at LiDAR frame rate, along with online loop closing and graph optimization. We validate our system in diverse environments using public datasets and real-world data, consistently achieving an average error below 20 cm and outperforming other state-of-the-art algorithms.
Read more7/23/2024