Flow-Inspired Lightweight Multi-Robot Real-Time Scheduling Planner

0
Sign in to get full access
Overview
- This paper presents a lightweight, real-time scheduling planner for multi-robot systems inspired by flow dynamics.
- The planner aims to coordinate the movements of multiple robots in dynamic environments while considering real-time constraints.
- The approach is designed to be computationally efficient, making it suitable for deployment on resource-constrained platforms.
Plain English Explanation
The paper describes a new way to coordinate the movements of multiple robots working together in a dynamic environment. The key idea is to take inspiration from the way fluids flow and use that to plan the robots' paths in a lightweight, efficient manner that can run in real-time.
Imagine a group of robots working together to move objects around a warehouse. They need to avoid collisions with each other and with obstacles, while also completing their tasks as quickly as possible. The approach proposed in this paper tries to mimic how water or air would flow through the same environment, using that "flow" to guide the robots' movements.
By basing the planning on fluid dynamics principles, the researchers were able to create a system that is computationally efficient and can make decisions quickly, even on robots with limited processing power. This is important because in many real-world scenarios, the robots need to react and adapt to changes in their environment in real-time.
The paper shows through experiments that this flow-inspired approach can effectively coordinate multi-robot systems, allowing the robots to navigate safely and efficiently, even in complex, dynamic environments. The simplicity and speed of the planner make it a promising technique for enabling agile, responsive multi-robot applications.
Technical Explanation
The key technical contribution of this paper is the development of a lightweight, real-time scheduling planner for multi-robot systems that is inspired by the principles of fluid dynamics. The planner uses a flow-based approach to coordinate the movements of multiple robots operating in dynamic environments while considering real-time constraints.
The architecture of the planner consists of several components, including a flow field generator that computes a fluid-like flow field to guide the robots' trajectories, and a real-time task scheduler that assigns tasks to the robots and plans their paths. The planning algorithm leverages the flow field to efficiently compute collision-free trajectories for each robot.
The experimental evaluation demonstrates the effectiveness of the flow-inspired planner in coordinating multi-robot systems in both simulated and real-world environments. The results show that the planner can achieve low computational complexity and high task completion rates compared to other state-of-the-art approaches.
Critical Analysis
The paper presents a novel and promising approach to multi-robot coordination, but it also acknowledges several limitations and areas for future research. For example, the current implementation assumes a known and static environment, which may not always be the case in real-world scenarios. Additionally, the planner's performance may degrade as the number of robots or the complexity of the environment increases.
While the flow-inspired approach demonstrates impressive computational efficiency, it would be valuable to further explore the theoretical underpinnings of this technique and its optimality properties compared to other multi-robot planning algorithms. Additionally, the authors note the need for more extensive testing and validation of the planner's performance in real-world scenarios with dynamic obstacles and uncertainties.
Conclusion
This paper presents a novel, flow-inspired approach to real-time scheduling and planning for multi-robot systems that is computationally efficient and effective in coordinating robot movements in dynamic environments. The lightweight design and real-time capabilities of the planner make it a promising technique for enabling agile, responsive multi-robot applications in a variety of domains, from warehouse automation to search and rescue operations.
While the paper identifies several limitations that warrant further research, the flow-inspired multi-robot planner represents an important step forward in the field of multi-robot coordination, offering a scalable and adaptive solution for managing the complexity of real-world multi-agent systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Flow-Inspired Lightweight Multi-Robot Real-Time Scheduling Planner
Han Liu, Yu Jin, Tianjiang Hu, Kai Huang
Collision avoidance and trajectory planning are crucial in multi-robot systems, particularly in environments with numerous obstacles. Although extensive research has been conducted in this field, the challenge of rapid traversal through such environments has not been fully addressed. This paper addresses this problem by proposing a novel real-time scheduling scheme designed to optimize the passage of multi-robot systems through complex, obstacle-rich maps. Inspired from network flow optimization, our scheme decomposes the environment into a network structure, enabling the efficient allocation of robots to paths based on real-time congestion data. The proposed scheduling planner operates on top of existing collision avoidance algorithms, focusing on minimizing traversal time by balancing robot detours and waiting times. Our simulation results demonstrate the efficiency of the proposed scheme. Additionally, we validated its effectiveness through real world flight tests using ten quadrotors. This work contributes a lightweight, effective scheduling planner capable of meeting the real-time demands of multi-robot systems in obstacle-rich environments.
Read more9/12/2024
💬
0
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Bask{i}n c{S}enbac{s}lar, Gaurav S. Sukhatme
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision avoidance as well as static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
Read more5/21/2024

0
Hierarchical Large Scale Multirobot Path (Re)Planning
Lishuo Pan, Kevin Hsu, Nora Ayanian
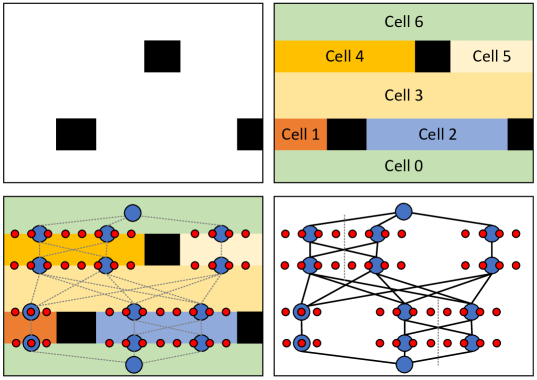
We consider a large-scale multi-robot path planning problem in a cluttered environment. Our approach achieves real-time replanning by dividing the workspace into cells and utilizing a hierarchical planner. Specifically, we propose novel multi-commodity flow-based high-level planners that route robots through cells with reduced congestion, along with an anytime low-level planner that computes collision-free paths for robots within each cell in parallel. A highlight of our method is a significant improvement in computation time. Specifically, we show empirical results of a 500-times speedup in computation time compared to the baseline multi-agent pathfinding approach on the environments we study. We account for the robot's embodiment and support non-stop execution with continuous replanning. We demonstrate the real-time performance of our algorithm with up to 142 robots in simulation, and a representative 32 physical Crazyflie nano-quadrotor experiment.
Read more9/25/2024

0
Efficient optimization-based trajectory planning
Jiayu Fan, Nikolce Murgovski, Jun Liang
This research addresses the increasing demand for advanced navigation systems capable of operating within confined surroundings. A significant challenge in this field is developing an efficient planning framework that can generalize across various types of collision avoidance missions. Utilizing numerical optimal control techniques, this study proposes a unified optimization-based planning framework to meet these demands. We focus on handling two collision avoidance problems, i.e., the object not colliding with obstacles and not colliding with boundaries of the constrained region. The object or obstacle is denoted as a union of convex polytopes and ellipsoids, and the constrained region is denoted as an intersection of such convex sets. Using these representations, collision avoidance can be approached by formulating explicit constraints that separate two convex sets, or ensure that a convex set is contained in another convex set, referred to as separating constraints and containing constraints, respectively. We propose to use the hyperplane separation theorem to formulate differentiable separating constraints, and utilize the S-procedure and geometrical methods to formulate smooth containing constraints. We state that compared to the state of the art, the proposed formulations allow a considerable reduction in nonlinear program size and geometry-based initialization in auxiliary variables used to formulate collision avoidance constraints. Finally, the efficacy of the proposed unified planning framework is evaluated in two contexts, autonomous parking in tractor-trailer vehicles and overtaking on curved lanes. The results in both cases exhibit an improved computational performance compared to existing methods.
Read more7/9/2024