Formalization of Operational Domain and Operational Design Domain for Automated Vehicles

0

Sign in to get full access
Overview
- The paper presents a formalization of the operational domain (OD) and operational design domain (ODD) for automated vehicles.
- OD and ODD are key concepts in ensuring the safe and reliable operation of self-driving cars.
- The paper aims to provide a rigorous mathematical framework for defining and describing these critical domains.
Plain English Explanation
The paper focuses on two important concepts for automated vehicles: the operational domain (OD) and the operational design domain (ODD).
The operational domain refers to the full range of situations and environments an automated vehicle might encounter during normal operation. This includes things like different road types, weather conditions, traffic patterns, and so on.
The operational design domain is a more specific subset of the operational domain. It describes the particular conditions under which an automated vehicle is designed to function safely and reliably. For example, an automated vehicle might be designed to operate only on well-marked highways in good weather.
The paper provides a rigorous mathematical framework for precisely defining and describing these two key concepts. This formalizes our understanding of the capabilities and limitations of self-driving cars, which is essential for ensuring their safe deployment on public roads.
Technical Explanation
The paper begins by defining the operational domain (OD) as the complete set of all possible situations an automated vehicle might encounter during normal operation. This includes factors like road types, weather conditions, traffic patterns, and more.
Next, the authors introduce the concept of the operational design domain (ODD), which is a subset of the OD. The ODD represents the specific conditions for which the automated vehicle is designed and validated to operate safely.
The paper then presents a formal mathematical model for defining and describing both the OD and ODD. This involves the use of set theory, topology, and other advanced concepts to precisely characterize the relevant domains.
The authors also discuss how this formal framework can be used to validate the performance of automated vehicles across their ODD, as well as to identify the boundaries of the ODD where the vehicle's capabilities may be exceeded.
Critical Analysis
The paper provides a rigorous and thoughtful approach to defining the key concepts of OD and ODD for automated vehicles. The mathematical formalization is a valuable contribution, as it helps to establish a more precise and standardized way of thinking about these critical domains.
However, the paper does not address some potential limitations or challenges. For example, it does not discuss how the OD and ODD may evolve over time as automated vehicle technology and the driving environment continue to change. Additionally, the authors do not explore how this formal framework might be applied in practice by automated vehicle developers and regulators.
Further research could investigate ways to make the OD and ODD models more dynamic and adaptable, as well as explore the practical implications and applications of this formalization in real-world settings.
Conclusion
This paper presents a formal mathematical framework for defining the operational domain (OD) and operational design domain (ODD) for automated vehicles. These concepts are crucial for ensuring the safe and reliable operation of self-driving cars on public roads.
The authors' rigorous approach to modeling these domains provides a valuable foundation for further research and development in this area. By precisely characterizing the capabilities and limitations of automated vehicles, this work can help accelerate the safe deployment of this transformative technology.
Overall, the paper makes an important contribution to the ongoing efforts to realize the promise of autonomous driving while prioritizing safety and responsible innovation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Formalization of Operational Domain and Operational Design Domain for Automated Vehicles
Ali Shakeri
Specifying an Operational Design Domain (ODD) is crucial for safeguarding automated vehicle systems against conditions that exceed their capabilities. Yet, prior definitions of ODD have relied on ambiguous and unclear terms, resulting in numerous misunderstandings and misconceptions. This paper introduces a formal approach to clearly define the Operational Domain (OD) and ODD for automated vehicles. Furthermore, the absence of essential terms, such as the OD, has resulted in the creation of numerous terms that have made things more complicated and confusing. This level of complexity is unacceptable when it comes to developing safety-critical systems, where any uncertainty can lead to significant risks. This study addresses these deficiencies by providing a precise mathematical model of OD and clarifying its relationship with other terms. Also, by formalizing these terms, this work establishes a foundation for developing further concepts such as ODD specification and ODD monitoring, which are explained in this paper.
Read more8/28/2024
0
A new Taxonomy for Automated Driving: Structuring Applications based on their Operational Design Domain, Level of Automation and Automation Readiness
Johannes Betz, Melina Lutwitzi, Steven Peters
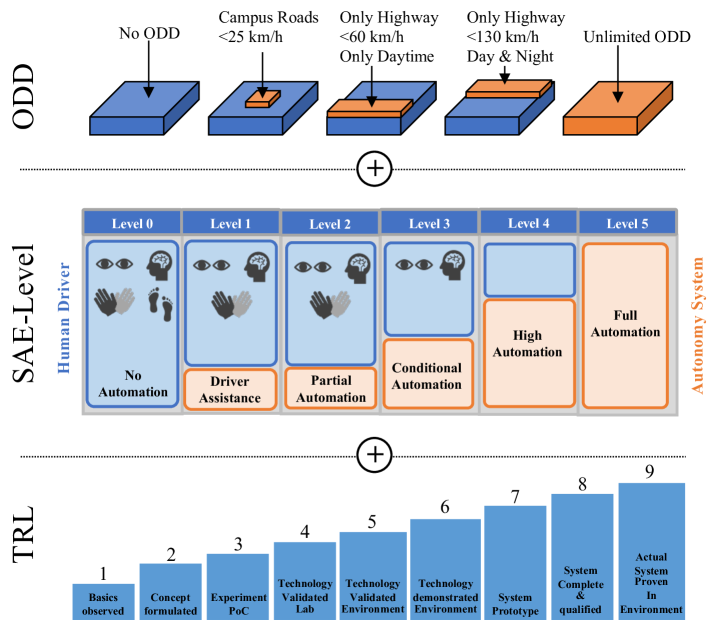
The aim of this paper is to investigate the relationship between operational design domains (ODD), automated driving SAE Levels, and Technology Readiness Level (TRL). The first highly automated vehicles, like robotaxis, are in commercial use, and the first vehicles with highway pilot systems have been delivered to private customers. It has emerged as a crucial issue that these automated driving systems differ significantly in their ODD and in their technical maturity. Consequently, any approach to compare these systems is difficult and requires a deep dive into defined ODDs, specifications, and technologies used. Therefore, this paper challenges current state-of-the-art taxonomies and develops a new and integrated taxonomy that can structure automated vehicle systems more efficiently. We use the well-known SAE Levels 0-5 as the level of responsibility, and link and describe the ODD at an intermediate level of abstraction. Finally, a new maturity model is explicitly proposed to improve the comparability of automated vehicles and driving functions. This method is then used to analyze today's existing automated vehicle applications, which are structured into the new taxonomy and rated by the new maturity levels. Our results indicate that this new taxonomy and maturity level model will help to differentiate automated vehicle systems in discussions more clearly and to discover white fields more systematically and upfront, e.g. for research but also for regulatory purposes.
Read more4/29/2024
✨
0
How to design a dataset compliant with an ML-based system ODD?
Cyril Cappi, No'emie Cohen, M'elanie Ducoffe, Christophe Gabreau, Laurent Gardes, Adrien Gauffriau, Jean-Brice Ginestet, Franck Mamalet, Vincent Mussot, Claire Pagetti, David Vigouroux
This paper focuses on a Vision-based Landing task and presents the design and the validation of a dataset that would comply with the Operational Design Domain (ODD) of a Machine-Learning (ML) system. Relying on emerging certification standards, we describe the process for establishing ODDs at both the system and image levels. In the process, we present the translation of high-level system constraints into actionable image-level properties, allowing for the definition of verifiable Data Quality Requirements (DQRs). To illustrate this approach, we use the Landing Approach Runway Detection (LARD) dataset which combines synthetic imagery and real footage, and we focus on the steps required to verify the DQRs. The replicable framework presented in this paper addresses the challenges of designing a dataset compliant with the stringent needs of ML-based systems certification in safety-critical applications.
Read more6/21/2024

0
ODD: Omni Differential Drive for Simultaneous Reconfiguration and Omnidirectional Mobility of Wheeled Robots
Ziqi Zhao, Peijia Xie, Max Q. -H. Meng
Wheeled robots are highly efficient in human living environments. However, conventional wheeled designs, with their limited degrees of freedom and constraints in robot configuration, struggle to simultaneously achieve stability, passability, and agility due to varying footprint needs. This paper proposes a novel robot drive model inspired by human movements, termed as the Omni Differential Drive (ODD). The ODD model innovatively utilizes a lateral differential drive to adjust wheel spacing without adding additional actuators to the existing omnidirectional drive. This approach enables wheeled robots to achieve both simultaneous reconfiguration and omnidirectional mobility. To validate the feasibility of the ODD model, a functional prototype was developed, followed by comprehensive kinematic analyses. Control systems for self-balancing and motion control were designed and implemented. Experimental validations confirmed the feasibility of the ODD mechanism and the effectiveness of the control strategies. The results underline the potential of this innovative drive system to enhance the mobility and adaptability of robotic platforms.
Read more7/16/2024