Software Defined Vehicles for Development of Deterministic Services

0
Sign in to get full access
Overview
- This paper discusses the use of software-defined vehicles (SDVs) for the development of deterministic services in intelligent transportation systems.
- Key topics covered include connected vehicles, vehicular applications, vehicular services, and time-sensitive networks.
- The research aims to enable more reliable and predictable vehicular services through the adoption of SDV principles.
Plain English Explanation
Modern vehicles are becoming increasingly connected and packed with advanced technology. This paper explores how we can use "software-defined vehicle" (SDV) principles to improve the reliability and consistency of the services and applications running in these connected cars.
In an SDV, the vehicle's hardware and software are decoupled, allowing the software to be more easily updated and customized. This allows vehicle manufacturers and app developers to quickly roll out new features and capabilities without having to redesign the entire vehicle.
The key idea is to use SDV techniques to create "deterministic" vehicular services - services that can reliably and predictably deliver the expected performance and functionality every time. This is important for safety-critical applications like autonomous driving, as well as for providing a consistently good user experience.
By adopting SDV principles, the researchers hope to enable more robust and dependable vehicular services that can fully leverage the increasing connectivity and computing power of modern cars. This could lead to improved transportation systems and enhanced user experiences for drivers and passengers alike.
Technical Explanation
The paper proposes a software-defined vehicle (SDV) architecture to enable the development of deterministic vehicular services. In an SDV, the vehicle's hardware and software are decoupled, allowing the software stack to be more easily managed and updated independently.
The key components of the SDV architecture include:
- A virtualized software platform that abstracts the vehicle's hardware
- A service orchestration layer that manages the deployment and configuration of vehicular applications
- Deterministic network capabilities based on time-sensitive networking (TSN) standards
This SDV architecture aims to provide a more reliable and predictable execution environment for vehicular services. By leveraging SDV principles, the researchers expect to:
- Improve the responsiveness and consistency of safety-critical applications
- Enable seamless updates and feature upgrades without disrupting core vehicle functions
- Facilitate the integration of third-party applications and services
The paper also discusses the use of data authorization and validation techniques to ensure the trustworthiness of data sources used by the vehicular services.
Critical Analysis
The paper presents a compelling vision for using software-defined principles to enhance the development of deterministic vehicular services. The proposed SDV architecture addresses several key challenges in modern connected vehicles, such as the need for reliable and updateable software stacks, as well as the integration of safety-critical and user-facing applications.
However, the paper does not delve deeply into the practical challenges of implementing such an SDV system. Questions remain about the feasibility of widespread adoption, the complexity of managing a virtualized vehicle platform, and the integration with existing automotive software ecosystems.
Furthermore, the paper could have explored the potential tradeoffs and limitations of the proposed approach. For example, the reliance on time-sensitive networking standards may limit compatibility with legacy in-vehicle communication protocols, and the data validation mechanisms could introduce additional overhead and latency.
Ultimately, while the core ideas presented are promising, further research and real-world experimentation would be necessary to fully validate the effectiveness and viability of the SDV approach for deterministic vehicular services.
Conclusion
This paper outlines a software-defined vehicle (SDV) architecture as a means to enable more reliable and predictable vehicular services. By decoupling the vehicle's hardware and software, the SDV approach aims to facilitate the development of deterministic applications that can consistently deliver the expected performance and functionality.
The proposed SDV system leverages virtualization, service orchestration, and time-sensitive networking to create a more flexible and adaptable in-vehicle software environment. This could lead to enhanced safety, improved user experiences, and easier integration of third-party applications in connected and autonomous vehicles.
While the core ideas presented are promising, the paper stops short of fully addressing the practical challenges and tradeoffs of implementing such an SDV system at scale. Further research and real-world testing would be necessary to validate the feasibility and effectiveness of this approach in the context of modern intelligent transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Software Defined Vehicles for Development of Deterministic Services
Pedro Veloso Teixeira, Duarte Raposo, Rui Lopes, Susana Sargento
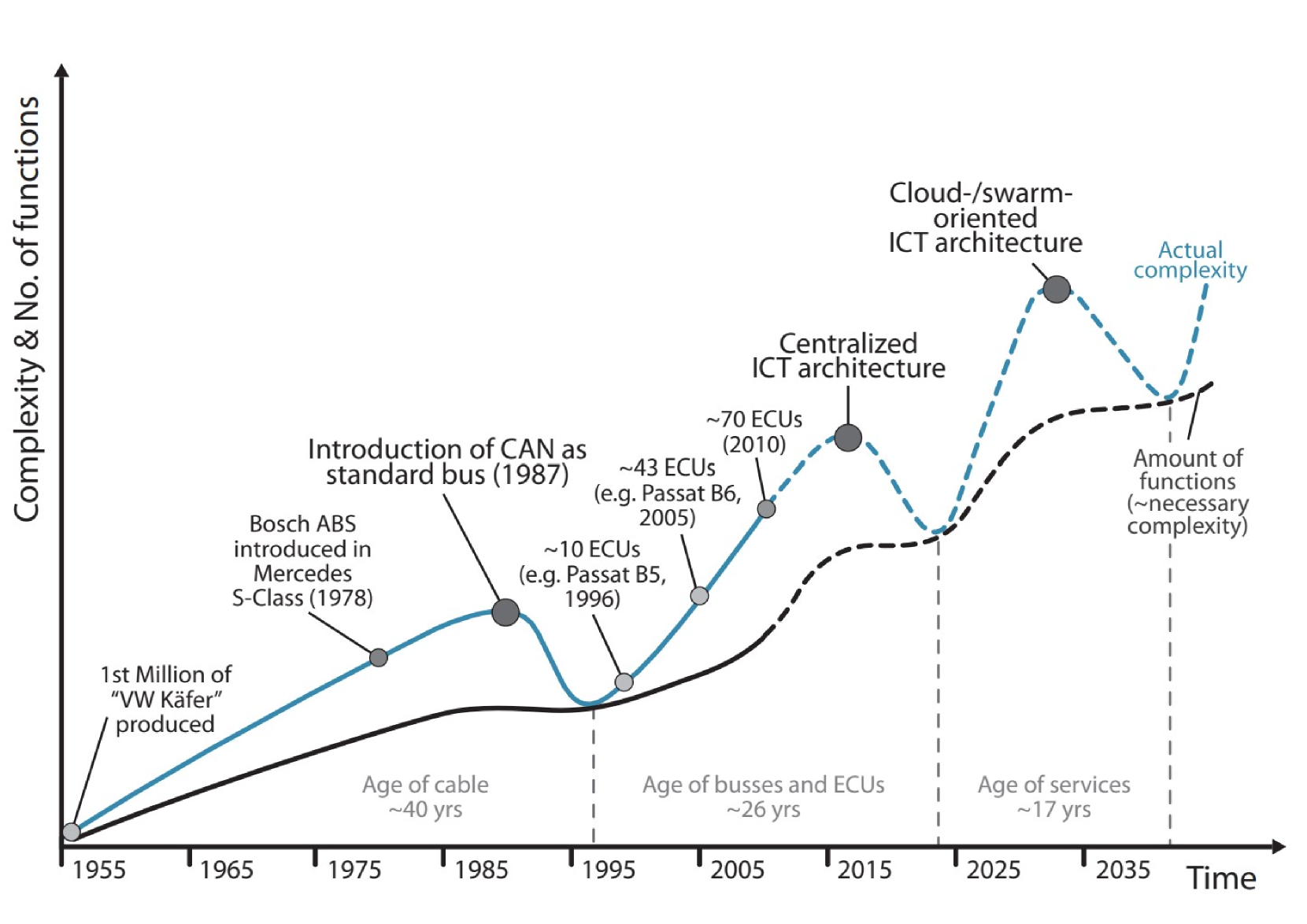
With modern vehicles evolving with more features, services, complex systems, with more sensors, actuators, and processing units, it is essential to think about vehicles not only as means of transportation that may tend towards full autonomy, but also as adaptive objects, that suit themselves to the needs of occupants. Vehicular services can be developed to support these adaptations. However, the increasing complexity of vehicular service development, even with current standardizations and best practices and guidelines, are insufficient to tackle the high complexity of development, with expectations of up to 1 (U.S.) billion lines of code for a fully (level 5) autonomous vehicle. Within this survey, the paradigm of Deterministic Software Defined Vehicles is explored towards increasing the quality and easiness of the development of services for automotive. Towards this, a proposed vision with four pillars is also provided: the deterministic network configurator, the data layer configurator, and the hypervisor configurator and the vehicle abstraction layer, all coordinated by a software orchestrator.
Read more7/25/2024
🌐
0
Enhancing Automotive User Experience with Dynamic Service Orchestration for Software Defined Vehicles
Pierre Laclau (Heudiasyc), St'ephane Bonnet (Heudiasyc), Bertrand Ducourthial (Heudiasyc), Xiaoting Li, Trista Lin
With the increasing demand for dynamic behaviors in automotive use cases, Software Defined Vehicles (SDVs) have emerged as a promising solution by bringing dynamic onboard service management capabilities. While users may request a wide range of services during vehicle operation, background tasks such as cooperative Vehicle-to-Everything (V2X) services can activate on-the-fly in response to real-time road conditions. In this dynamic environment, the efficient allocation of onboard resources becomes a complex challenge, in order to meet mixed-criticality onboard Quality-of-Service (QoS) network requirements while ensuring an optimal user experience. Additionally, the ever-evolving real-time network connectivity and computational availability conditions further complicate the process. In this context, we present a dynamic resource-based onboard service orchestration algorithm that considers real-time in-vehicle and V2X network health, along with onboard resource constraints, to select degraded modes for onboard applications and maximize user experience. To enable dynamic orchestration, we introduce the concept of Automotive eXperience Integrity Level (AXIL) which expresses a runtime priority for non-safety-critical applications. This algorithm produces near-optimal solutions while significantly reducing execution time compared to straightforward methods as demonstrated by simulation results. With this approach, we aim to enable efficient onboard execution for a user experience-focused service orchestration.
Read more7/4/2024
0
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
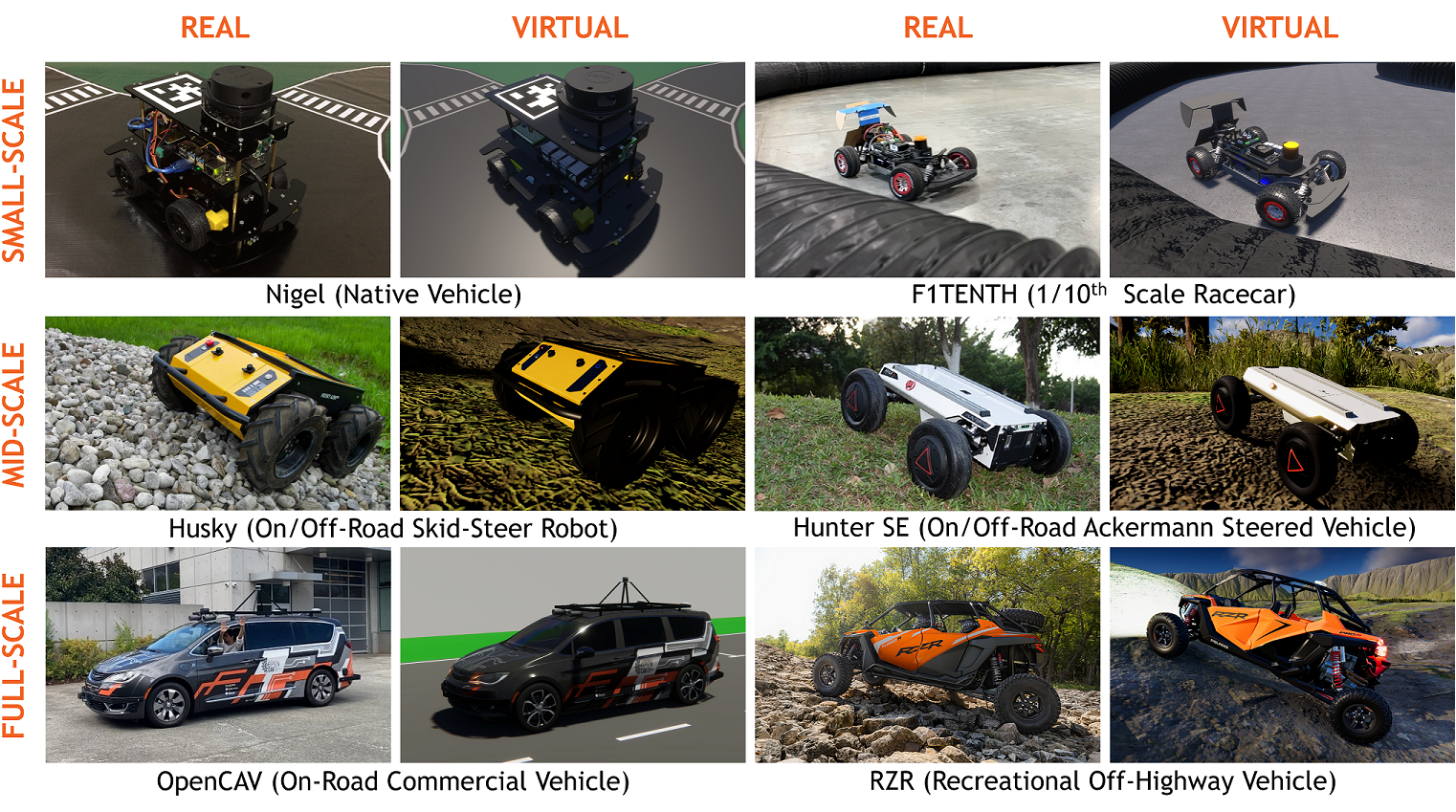
Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
Read more5/8/2024
0
A new Taxonomy for Automated Driving: Structuring Applications based on their Operational Design Domain, Level of Automation and Automation Readiness
Johannes Betz, Melina Lutwitzi, Steven Peters
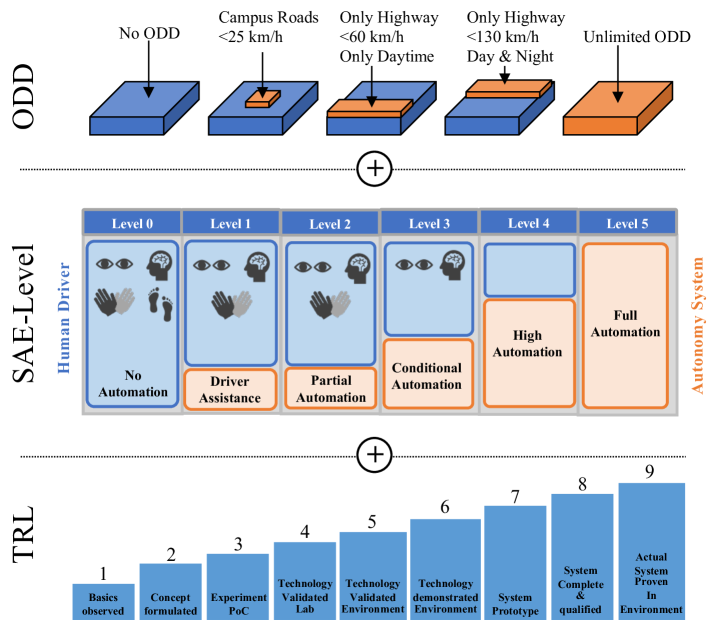
The aim of this paper is to investigate the relationship between operational design domains (ODD), automated driving SAE Levels, and Technology Readiness Level (TRL). The first highly automated vehicles, like robotaxis, are in commercial use, and the first vehicles with highway pilot systems have been delivered to private customers. It has emerged as a crucial issue that these automated driving systems differ significantly in their ODD and in their technical maturity. Consequently, any approach to compare these systems is difficult and requires a deep dive into defined ODDs, specifications, and technologies used. Therefore, this paper challenges current state-of-the-art taxonomies and develops a new and integrated taxonomy that can structure automated vehicle systems more efficiently. We use the well-known SAE Levels 0-5 as the level of responsibility, and link and describe the ODD at an intermediate level of abstraction. Finally, a new maturity model is explicitly proposed to improve the comparability of automated vehicles and driving functions. This method is then used to analyze today's existing automated vehicle applications, which are structured into the new taxonomy and rated by the new maturity levels. Our results indicate that this new taxonomy and maturity level model will help to differentiate automated vehicle systems in discussions more clearly and to discover white fields more systematically and upfront, e.g. for research but also for regulatory purposes.
Read more4/29/2024