A new Taxonomy for Automated Driving: Structuring Applications based on their Operational Design Domain, Level of Automation and Automation Readiness

0
Sign in to get full access
Overview
- Presents a new taxonomy for categorizing automated driving applications
- Classifies applications based on Operational Design Domain, Level of Automation, and Automation Readiness
- Aims to provide a structured approach for understanding and developing automated driving systems
Plain English Explanation
This paper proposes a new way to organize and understand automated driving technologies. The researchers developed a classification system that looks at three key factors:
-
Operational Design Domain (ODD): This refers to the specific environments and conditions an automated system is designed to operate in, such as highways, city streets, or off-road terrain.
-
Level of Automation: This describes how much the human driver is involved, ranging from driver assistance features to fully autonomous driving where the human is not needed.
-
Automation Readiness: This evaluates how mature and capable the automated technology is, from early prototypes to commercially deployed systems.
By considering these three dimensions, the researchers created a taxonomy that can help clearly categorize different automated driving applications. This provides a structured framework for developers, regulators, and the public to better understand the capabilities and limitations of various automated driving systems.
For example, a highway pilot feature that can handle most driving tasks on the highway would have a relatively narrow ODD, a high level of automation, and be quite mature in its automation readiness. In contrast, an early prototype for navigating complex urban environments would have a broader ODD, a lower level of automation, and be less mature in its readiness.
Technical Explanation
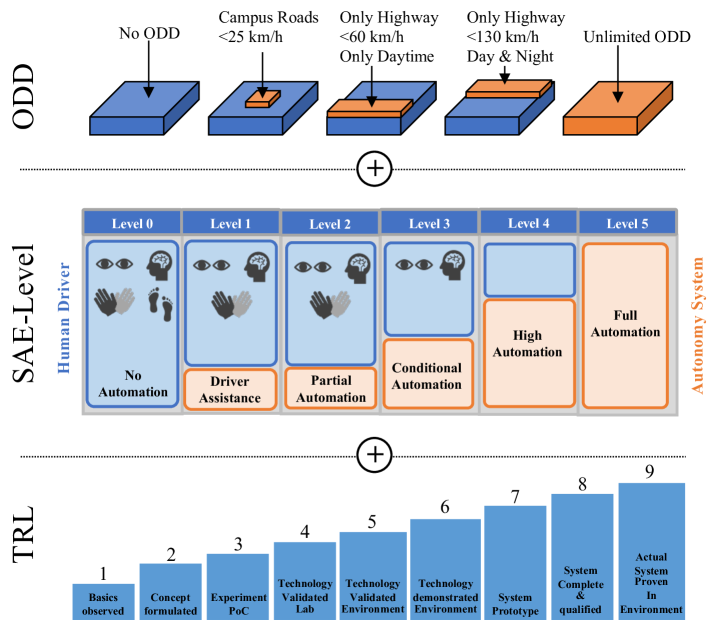
The paper presents a new taxonomy for automated driving applications that classifies them along three key dimensions: Operational Design Domain (ODD), Level of Automation, and Automation Readiness.
The ODD describes the specific environmental and operational conditions an automated system is designed to handle, such as road types, traffic density, weather, and other factors. The Level of Automation ranges from driver assistance features to full autonomy where the human is out of the loop. Automation Readiness evaluates how mature and capable the technology is, from early prototypes to production-ready systems.
By considering these three dimensions, the researchers developed a structured taxonomy that can be used to categorize and understand different automated driving applications. They demonstrate the framework with several example use cases, showing how it provides a common language and approach for developers, regulators, and the public to assess automated driving capabilities and limitations.
Critical Analysis
The taxonomy presented in this paper provides a useful framework for organizing the rapidly evolving field of automated driving. By simultaneously considering the ODD, automation level, and readiness level, it offers a more nuanced and comprehensive way to understand the diverse range of automated driving applications.
However, the paper acknowledges that the boundaries between categories may not always be clear-cut, and that individual systems could exhibit characteristics spanning multiple classifications. Additionally, the taxonomy does not directly address societal or ethical considerations around the deployment of automated vehicles, which will be crucial as the technology matures.
Further research could explore how this taxonomy might evolve to incorporate factors like safety performance, small-scale testing capabilities, and integration with broader transportation systems. As vehicle digital twins and other advanced simulation tools mature, the taxonomy may also need to adapt to address the implications of these new technologies.
Conclusion
This paper presents a comprehensive taxonomy for classifying automated driving applications based on their Operational Design Domain, Level of Automation, and Automation Readiness. By providing a structured framework for understanding the capabilities and limitations of different systems, this taxonomy can help guide the development, regulation, and deployment of automated driving technologies.
As the field of automated vehicles continues to evolve rapidly, this taxonomy offers a valuable tool for stakeholders to navigate the complex landscape and work towards the safe and effective integration of these transformative technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A new Taxonomy for Automated Driving: Structuring Applications based on their Operational Design Domain, Level of Automation and Automation Readiness
Johannes Betz, Melina Lutwitzi, Steven Peters
The aim of this paper is to investigate the relationship between operational design domains (ODD), automated driving SAE Levels, and Technology Readiness Level (TRL). The first highly automated vehicles, like robotaxis, are in commercial use, and the first vehicles with highway pilot systems have been delivered to private customers. It has emerged as a crucial issue that these automated driving systems differ significantly in their ODD and in their technical maturity. Consequently, any approach to compare these systems is difficult and requires a deep dive into defined ODDs, specifications, and technologies used. Therefore, this paper challenges current state-of-the-art taxonomies and develops a new and integrated taxonomy that can structure automated vehicle systems more efficiently. We use the well-known SAE Levels 0-5 as the level of responsibility, and link and describe the ODD at an intermediate level of abstraction. Finally, a new maturity model is explicitly proposed to improve the comparability of automated vehicles and driving functions. This method is then used to analyze today's existing automated vehicle applications, which are structured into the new taxonomy and rated by the new maturity levels. Our results indicate that this new taxonomy and maturity level model will help to differentiate automated vehicle systems in discussions more clearly and to discover white fields more systematically and upfront, e.g. for research but also for regulatory purposes.
Read more4/29/2024

0
Formalization of Operational Domain and Operational Design Domain for Automated Vehicles
Ali Shakeri
Specifying an Operational Design Domain (ODD) is crucial for safeguarding automated vehicle systems against conditions that exceed their capabilities. Yet, prior definitions of ODD have relied on ambiguous and unclear terms, resulting in numerous misunderstandings and misconceptions. This paper introduces a formal approach to clearly define the Operational Domain (OD) and ODD for automated vehicles. Furthermore, the absence of essential terms, such as the OD, has resulted in the creation of numerous terms that have made things more complicated and confusing. This level of complexity is unacceptable when it comes to developing safety-critical systems, where any uncertainty can lead to significant risks. This study addresses these deficiencies by providing a precise mathematical model of OD and clarifying its relationship with other terms. Also, by formalizing these terms, this work establishes a foundation for developing further concepts such as ODD specification and ODD monitoring, which are explained in this paper.
Read more8/28/2024
0
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
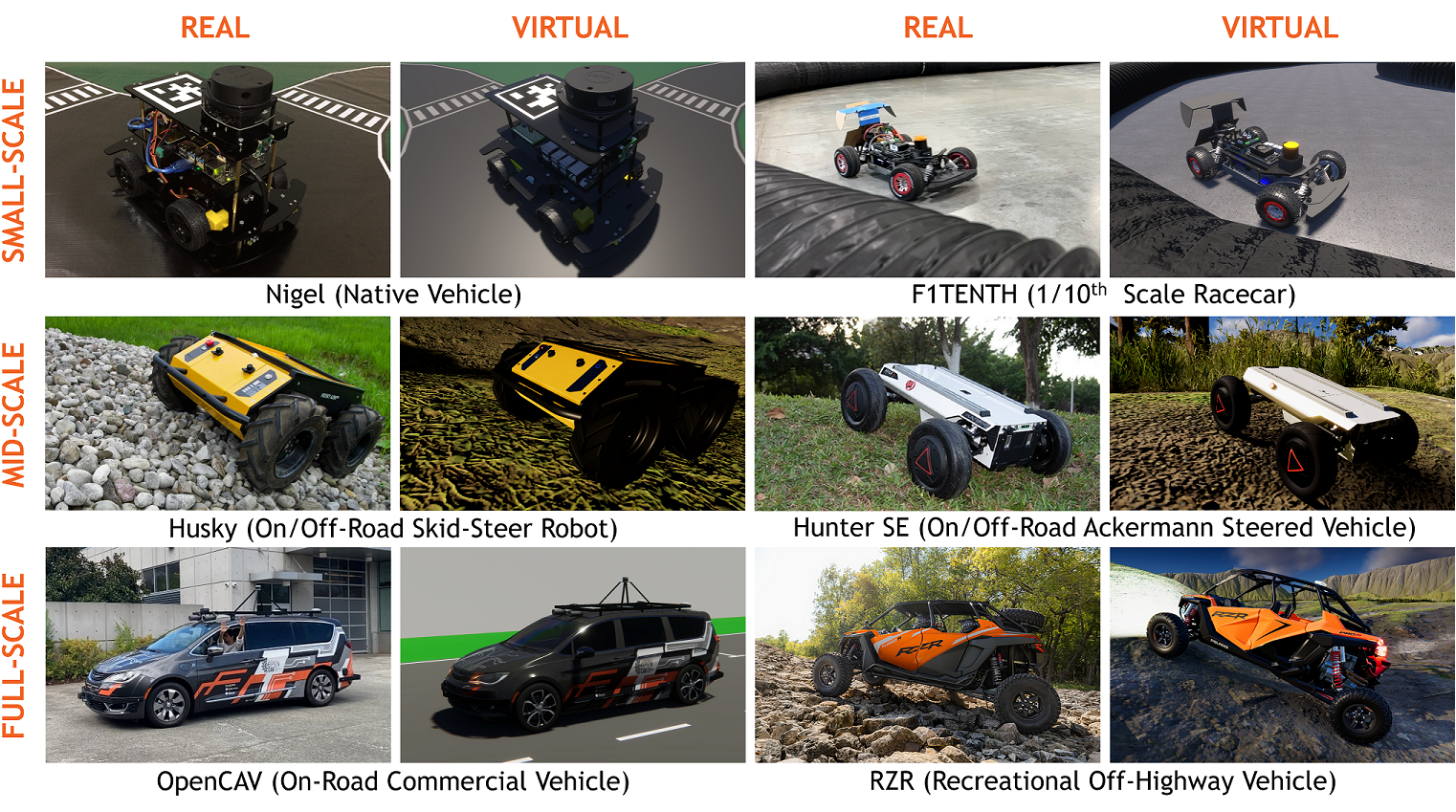
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
Read more5/8/2024
0
Software Defined Vehicles for Development of Deterministic Services
Pedro Veloso Teixeira, Duarte Raposo, Rui Lopes, Susana Sargento
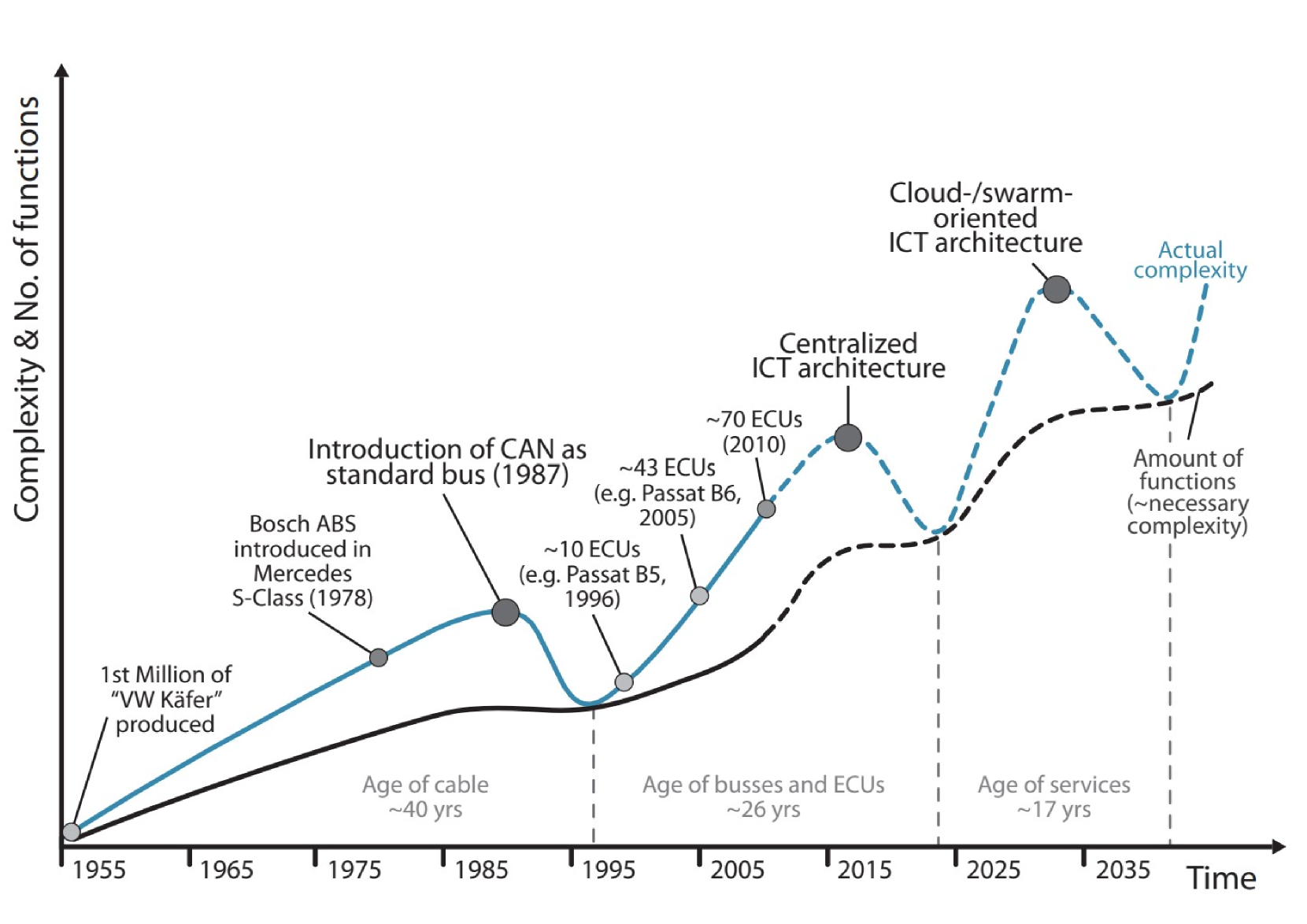
With modern vehicles evolving with more features, services, complex systems, with more sensors, actuators, and processing units, it is essential to think about vehicles not only as means of transportation that may tend towards full autonomy, but also as adaptive objects, that suit themselves to the needs of occupants. Vehicular services can be developed to support these adaptations. However, the increasing complexity of vehicular service development, even with current standardizations and best practices and guidelines, are insufficient to tackle the high complexity of development, with expectations of up to 1 (U.S.) billion lines of code for a fully (level 5) autonomous vehicle. Within this survey, the paradigm of Deterministic Software Defined Vehicles is explored towards increasing the quality and easiness of the development of services for automotive. Towards this, a proposed vision with four pillars is also provided: the deterministic network configurator, the data layer configurator, and the hypervisor configurator and the vehicle abstraction layer, all coordinated by a software orchestrator.
Read more7/25/2024