FRENETIX: A High-Performance and Modular Motion Planning Framework for Autonomous Driving

0
🤔
Sign in to get full access
Overview
- Introduces a modular motion planning framework for autonomous vehicles
- Uses a sampling-based trajectory planning algorithm to tackle challenges in solution space construction and optimization
- Applicable to both real vehicles and simulations, offering a robust solution for complex autonomous navigation
- Employs a multi-objective optimization strategy for efficient navigation in static and highly dynamic environments
- Focuses on optimizing trajectory comfort, safety, and path precision
Plain English Explanation
This research presents a new approach for helping self-driving cars navigate complex environments. The key idea is to use a sampling-based trajectory planning algorithm that can efficiently find good driving paths, even in crowded and dynamic settings.
The algorithm works by quickly generating and evaluating many potential driving trajectories, looking for ones that are comfortable, safe, and accurately follow the desired route. This multi-objective optimization strategy allows the system to make smart tradeoffs between different priorities.
The researchers tested this approach in over 1,700 virtual scenarios, including complex urban environments and highways. They found it could calculate good trajectories very quickly (in about 8 milliseconds), and had a high success rate of 88% in finding viable paths, even in challenging conditions. This suggests the algorithm is robust and reliable.
The team also demonstrated the framework running on real self-driving cars, showing it can be effectively integrated and executed in the real world. This helps ensure the approach meets the stringent requirements of actual autonomous driving scenarios.
By making this work open-source, the researchers are allowing others to build upon and improve the motion planning capabilities for self-driving cars.
Technical Explanation
The researchers developed a modular motion planning framework for autonomous vehicles that uses a sampling-based trajectory planning algorithm. This approach tackles the key challenges of efficiently constructing the solution space and optimizing the trajectories for autonomous navigation.
The algorithm is designed to work with both simulated and real self-driving vehicles, providing a robust solution for complex autonomous driving scenarios. It employs a multi-objective optimization strategy to navigate efficiently in static and highly dynamic environments, focusing on optimizing trajectory comfort, safety, and path precision.
The team evaluated the algorithm's performance across 1,750 virtual urban and highway scenarios. They found it could generate 800 potential trajectories and evaluate their feasibility and cost in just 8 milliseconds, with a high success rate of 88% in finding viable paths. This suggests the sampling and feasibility checking process is highly efficient.
The researchers also integrated and tested the framework on real autonomous vehicles, evaluating the deviations from the controller on a test track. This demonstrated the algorithm's robustness and reliability in meeting the stringent requirements of real-world autonomous driving.
Critical Analysis
The paper provides a thorough evaluation of the motion planning framework, including extensive testing in simulation and on real vehicles. This helps validate the approach and build confidence in its capabilities.
However, the paper does not delve deeply into the specific details of the sampling-based algorithm or the multi-objective optimization strategy. While the high-level descriptions are helpful, more technical information could be valuable for researchers looking to understand or build upon this work.
Additionally, the paper does not address potential limitations or edge cases that the framework may struggle with. For example, it's unclear how the system would perform in highly unusual or unpredictable driving scenarios, or how it might handle sensor failures or other real-world complications.
Further research could explore these areas, as well as investigate ways to improve the framework's speed, robustness, and adaptability to an even wider range of autonomous driving challenges. Collaborating with other teams working on spatial-temporal graph-based planners or Frenet-frame-based approaches could also lead to valuable insights and advancements.
Conclusion
This research presents a promising modular motion planning framework for autonomous vehicles that uses a sampling-based trajectory planning algorithm. The approach demonstrated strong performance in simulation and on real vehicles, suggesting it could be a valuable tool for enhancing the capabilities of self-driving cars.
By making the code and additional modules publicly available, the researchers are enabling others to build upon and further develop these motion planning techniques for autonomous driving. As the field of self-driving technology continues to evolve, innovations like this framework could play an important role in making autonomous vehicles safer, more efficient, and more reliable in complex real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤔
0
FRENETIX: A High-Performance and Modular Motion Planning Framework for Autonomous Driving
Rainer Trauth, Korbinian Moller, Gerald Wuersching, Johannes Betz
Our research introduces a modular motion planning framework for autonomous vehicles using a sampling-based trajectory planning algorithm. This approach effectively tackles the challenges of solution space construction and optimization in path planning. The algorithm is applicable to both real vehicles and simulations, offering a robust solution for complex autonomous navigation. Our method employs a multi-objective optimization strategy for efficient navigation in static and highly dynamic environments, focusing on optimizing trajectory comfort, safety, and path precision. The algorithm is used to analyze the algorithm performance and success rate in 1750 virtual complex urban and highway scenarios. Our results demonstrate fast calculation times (8ms for 800 trajectories), a high success rate in complex scenarios (88%), and easy adaptability with different modules presented. The most noticeable difference exhibited was the fast trajectory sampling, feasibility check, and cost evaluation step across various trajectory counts. We demonstrate the integration and execution of the framework on real vehicles by evaluating deviations from the controller using a test track. This evaluation highlights the algorithm's robustness and reliability, ensuring it meets the stringent requirements of real-world autonomous driving scenarios. The code and the additional modules used in this research are publicly available as open-source software and can be accessed at the following link: https://github.com/TUM-AVS/Frenetix-Motion-Planner.
Read more6/17/2024
0
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
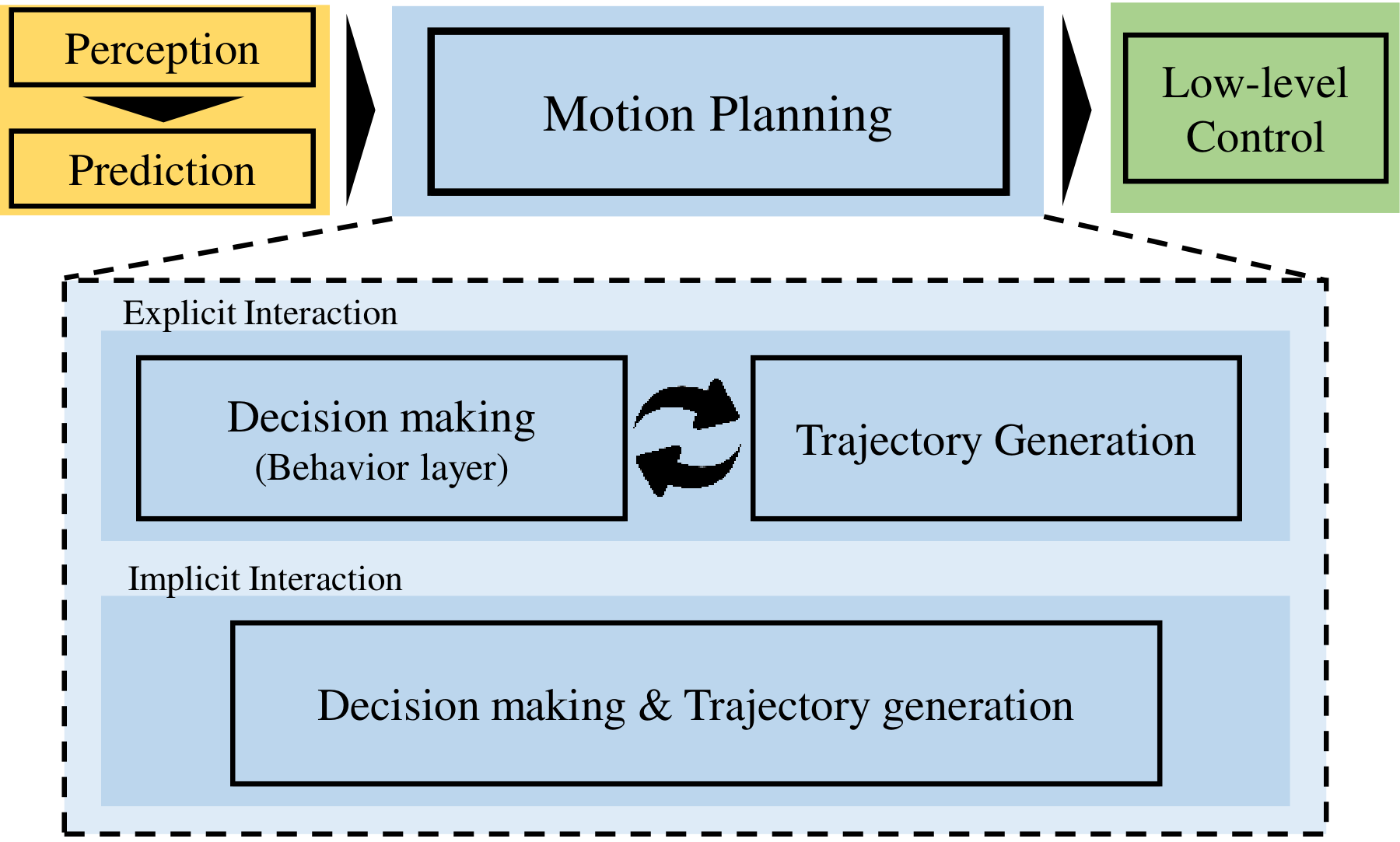
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
Read more6/11/2024

0
Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
Read more6/6/2024
🔮
0
MFTraj: Map-Free, Behavior-Driven Trajectory Prediction for Autonomous Driving
Haicheng Liao, Zhenning Li, Chengyue Wang, Huanming Shen, Bonan Wang, Dongping Liao, Guofa Li, Chengzhong Xu
This paper introduces a trajectory prediction model tailored for autonomous driving, focusing on capturing complex interactions in dynamic traffic scenarios without reliance on high-definition maps. The model, termed MFTraj, harnesses historical trajectory data combined with a novel dynamic geometric graph-based behavior-aware module. At its core, an adaptive structure-aware interactive graph convolutional network captures both positional and behavioral features of road users, preserving spatial-temporal intricacies. Enhanced by a linear attention mechanism, the model achieves computational efficiency and reduced parameter overhead. Evaluations on the Argoverse, NGSIM, HighD, and MoCAD datasets underscore MFTraj's robustness and adaptability, outperforming numerous benchmarks even in data-challenged scenarios without the need for additional information such as HD maps or vectorized maps. Importantly, it maintains competitive performance even in scenarios with substantial missing data, on par with most existing state-of-the-art models. The results and methodology suggest a significant advancement in autonomous driving trajectory prediction, paving the way for safer and more efficient autonomous systems.
Read more5/3/2024