An Online Spatial-Temporal Graph Trajectory Planner for Autonomous Vehicles
2404.12256
0
0
Abstract
The autonomous driving industry is expected to grow by over 20 times in the coming decade and, thus, motivate researchers to delve into it. The primary focus of their research is to ensure safety, comfort, and efficiency. An autonomous vehicle has several modules responsible for one or more of the aforementioned items. Among these modules, the trajectory planner plays a pivotal role in the safety of the vehicle and the comfort of its passengers. The module is also responsible for respecting kinematic constraints and any applicable road constraints. In this paper, a novel online spatial-temporal graph trajectory planner is introduced to generate safe and comfortable trajectories. First, a spatial-temporal graph is constructed using the autonomous vehicle, its surrounding vehicles, and virtual nodes along the road with respect to the vehicle itself. Next, the graph is forwarded into a sequential network to obtain the desired states. To support the planner, a simple behavioral layer is also presented that determines kinematic constraints for the planner. Furthermore, a novel potential function is also proposed to train the network. Finally, the proposed planner is tested on three different complex driving tasks, and the performance is compared with two frequently used methods. The results show that the proposed planner generates safe and feasible trajectories while achieving similar or longer distances in the forward direction and comparable comfort ride.
Create account to get full access
Overview
- This paper introduces an online spatial-temporal graph trajectory planner for autonomous vehicles.
- The planner uses a graph neural network to model the spatial-temporal interactions between the autonomous vehicle and its surrounding environment.
- The goal is to generate safe and efficient trajectories for the autonomous vehicle to navigate through dynamic environments.
Plain English Explanation
The paper describes a new system for planning the movements of self-driving cars. The key idea is to model the relationships between the car and the objects around it, both in space and over time. This allows the system to predict how the environment will change and plan a safe path for the car to follow.
The system uses a special type of machine learning model called a graph neural network to understand these spatial-temporal interactions. This allows it to quickly respond to changes in the environment, rather than relying on pre-planned routes.
The benefit of this approach is that it can help self-driving cars navigate complex, dynamic situations more safely and efficiently. Instead of just following a fixed plan, the car can continuously adjust its trajectory based on what's happening around it in real-time.
Technical Explanation
The key components of the proposed system are:
-
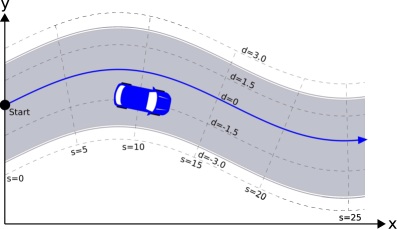
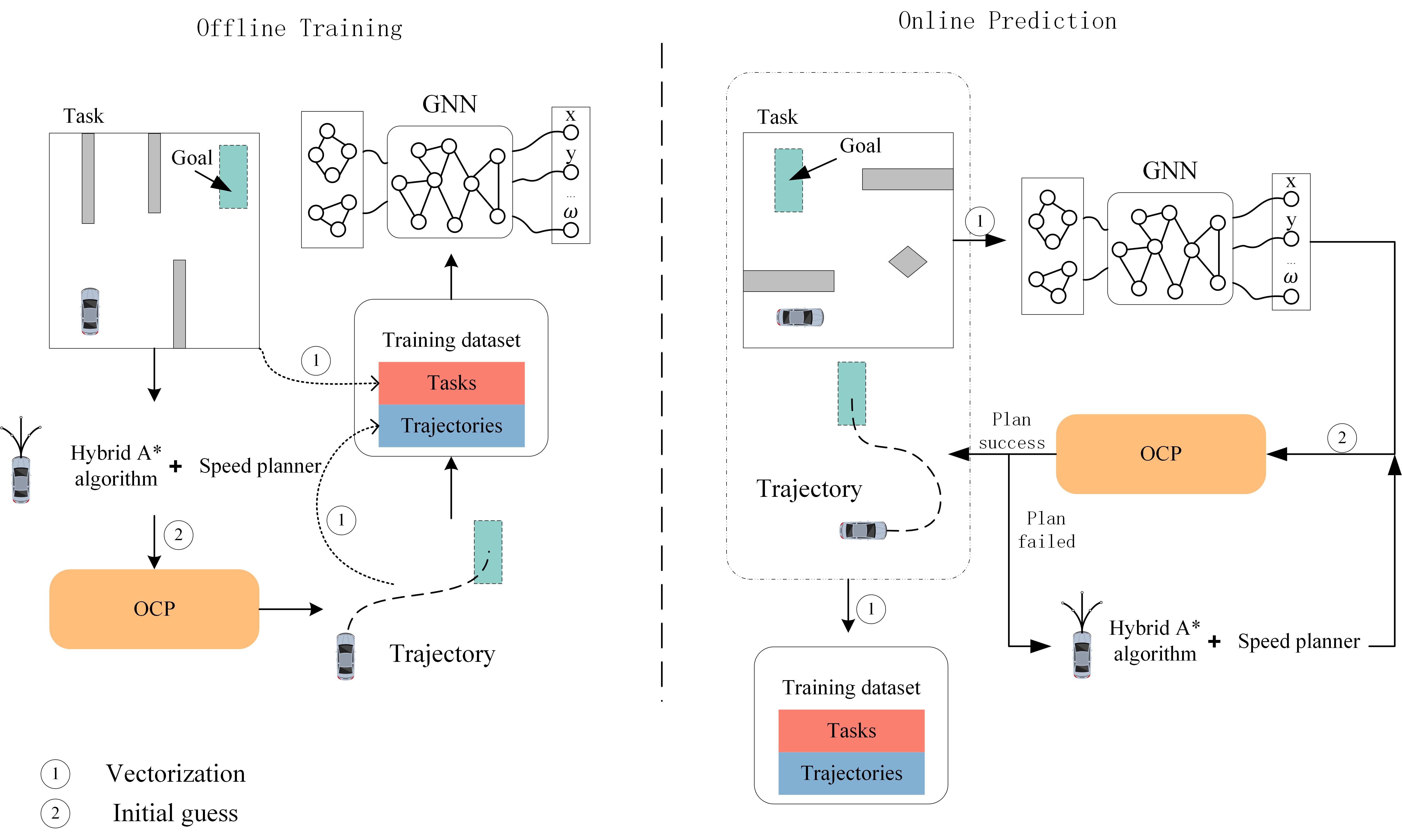
Spatial-Temporal Graph Representation: The authors model the environment around the autonomous vehicle as a graph, where nodes represent objects (e.g. other vehicles, pedestrians) and edges represent spatial-temporal relationships between them. This allows the system to capture both the static layout of the environment and how it changes over time.
-
Graph Neural Network: A graph neural network is used to process the spatial-temporal graph and extract relevant features for trajectory planning. This allows the model to learn complex, context-aware representations of the environment.
-
Online Trajectory Planning: The graph neural network outputs a representation of the optimal trajectory for the autonomous vehicle. This is then used to generate a smooth, collision-free path in real-time as the vehicle navigates through the environment.
The authors evaluate their system in simulation and demonstrate its ability to generate safe and efficient trajectories in dynamic environments, outperforming baseline trajectory planning and motion planning approaches.
Critical Analysis
The authors acknowledge that their system relies on accurate perception of the environment, which can be challenging in the real world. Additionally, the computational complexity of the graph neural network may limit its use in resource-constrained settings, such as autonomous aerial vehicles.
Further research could explore ways to improve the efficiency and robustness of the spatial-temporal graph representation and trajectory planning algorithm, as well as evaluate the system's performance in more diverse and complex environments.
Conclusion
This paper presents a novel approach to trajectory planning for autonomous vehicles that leverages spatial-temporal graphs and graph neural networks. By modeling the dynamic interactions between the vehicle and its surroundings, the system can generate safe and efficient trajectories in real-time. While there are some limitations to address, this work represents an important step forward in developing more advanced and capable autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Trajectory Planning for Autonomous Driving in Unstructured Scenarios Based on Graph Neural Network and Numerical Optimization
Sumin Zhang, Kuo Li, Rui He, Zhiwei Meng, Yupeng Chang, Xiaosong Jin, Ri Bai
0
0
In unstructured environments, obstacles are diverse and lack lane markings, making trajectory planning for intelligent vehicles a challenging task. Traditional trajectory planning methods typically involve multiple stages, including path planning, speed planning, and trajectory optimization. These methods require the manual design of numerous parameters for each stage, resulting in significant workload and computational burden. While end-to-end trajectory planning methods are simple and efficient, they often fail to ensure that the trajectory meets vehicle dynamics and obstacle avoidance constraints in unstructured scenarios. Therefore, this paper proposes a novel trajectory planning method based on Graph Neural Networks (GNN) and numerical optimization. The proposed method consists of two stages: (1) initial trajectory prediction using the GNN, (2) trajectory optimization using numerical optimization. First, the graph neural network processes the environment information and predicts a rough trajectory, replacing traditional path and speed planning. This predicted trajectory serves as the initial solution for the numerical optimization stage, which optimizes the trajectory to ensure compliance with vehicle dynamics and obstacle avoidance constraints. We conducted simulation experiments to validate the feasibility of the proposed algorithm and compared it with other mainstream planning algorithms. The results demonstrate that the proposed method simplifies the trajectory planning process and significantly improves planning efficiency.
6/14/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024
➖
Safe and Personalizable Logical Guidance for Trajectory Planning of Autonomous Driving
Yuejiao Xu, Ruolin Wang, Chengpeng Xu, Jianmin Ji
0
0
Autonomous vehicles necessitate a delicate balance between safety, efficiency, and user preferences in trajectory planning. Existing traditional or learning-based methods face challenges in adequately addressing all these aspects. In response, this paper proposes a novel component termed the Logical Guidance Layer (LGL), designed for seamless integration into autonomous driving trajectory planning frameworks, specifically tailored for highway scenarios. The LGL guides the trajectory planning with a local target area determined through scenario reasoning, scenario evaluation, and guidance area calculation. Integrating the Responsibility-Sensitive Safety (RSS) model, the LGL ensures formal safety guarantees while accommodating various user preferences defined by logical formulae. Experimental validation demonstrates the effectiveness of the LGL in achieving a balance between safety and efficiency, and meeting user preferences in autonomous highway driving scenarios.
5/24/2024
🌐
Characterized Diffusion and Spatial-Temporal Interaction Network for Trajectory Prediction in Autonomous Driving
Haicheng Liao, Xuelin Li, Yongkang Li, Hanlin Kong, Chengyue Wang, Bonan Wang, Yanchen Guan, KaHou Tam, Zhenning Li, Chengzhong Xu
0
0
Trajectory prediction is a cornerstone in autonomous driving (AD), playing a critical role in enabling vehicles to navigate safely and efficiently in dynamic environments. To address this task, this paper presents a novel trajectory prediction model tailored for accuracy in the face of heterogeneous and uncertain traffic scenarios. At the heart of this model lies the Characterized Diffusion Module, an innovative module designed to simulate traffic scenarios with inherent uncertainty. This module enriches the predictive process by infusing it with detailed semantic information, thereby enhancing trajectory prediction accuracy. Complementing this, our Spatio-Temporal (ST) Interaction Module captures the nuanced effects of traffic scenarios on vehicle dynamics across both spatial and temporal dimensions with remarkable effectiveness. Demonstrated through exhaustive evaluations, our model sets a new standard in trajectory prediction, achieving state-of-the-art (SOTA) results on the Next Generation Simulation (NGSIM), Highway Drone (HighD), and Macao Connected Autonomous Driving (MoCAD) datasets across both short and extended temporal spans. This performance underscores the model's unparalleled adaptability and efficacy in navigating complex traffic scenarios, including highways, urban streets, and intersections.
5/6/2024