Path Planning for a Cooperative Navigation Aid Vehicle to Assist Multiple Agents Sequentially

0
Sign in to get full access
Overview
- This paper presents a path planning approach for a Cooperative Navigation Aid (CNA) vehicle to assist multiple agents intermittently.
- The CNA vehicle is designed to navigate and provide navigation assistance to other agents in a shared environment.
- The paper focuses on the path planning problem for the CNA vehicle, considering the motion constraints of the agents and the CNA vehicle.
Plain English Explanation
The paper describes a system where a special vehicle, called a Cooperative Navigation Aid (CNA) vehicle, is designed to help guide and assist other agents (e.g., people or robots) as they move through an environment. The CNA vehicle plans its own path to move around and provide navigation support to the other agents, even if the agents are not always present or move in unpredictable ways.
The key idea is that the CNA vehicle can intelligently plan its movements to intercept and help the other agents at the right times and locations, rather than just following a pre-determined route. This allows the CNA vehicle to be more efficient and effective in providing navigation assistance, even in dynamic and uncertain environments.
The paper formulates the problem of path planning for the CNA vehicle, taking into account the motion constraints of both the CNA vehicle and the agents it is assisting. The goal is to find an optimal path for the CNA vehicle that allows it to provide the most helpful navigation support to the agents while also considering factors like energy efficiency and safety.
Technical Explanation
The paper focuses on the problem of path planning for a Cooperative Navigation Aid (CNA) vehicle that assists multiple agents in a shared environment. The CNA vehicle is designed to navigate and provide navigation support to other agents, such as people or robots, who may be present intermittently and move in unpredictable ways.
The authors formulate the problem of path planning for the CNA vehicle, taking into account the motion constraints of both the CNA vehicle and the assisted agents. The objective is to find an optimal path for the CNA vehicle that allows it to provide the most helpful navigation support to the agents while also considering factors like energy efficiency and safety.
The paper builds on previous work in areas such as motion primitives planning for center-articulated vehicles, efficient optimization-based trajectory planning, and real-world deployment of hierarchical, uncertainty-aware collaborative systems. It also draws inspiration from research on real-time motion planning for autonomous vehicles in dynamic environments and cooperative, informative path planning for traversing Mars.
Critical Analysis
The paper presents a novel approach to path planning for a CNA vehicle that aims to provide effective navigation support to multiple agents in a shared environment. The authors have carefully considered the practical constraints and challenges involved in such a system, such as the intermittent presence and unpredictable motion of the assisted agents.
One potential limitation of the approach is the reliance on accurate predictions of the agents' future movements, which may be difficult to achieve in highly dynamic and uncertain environments. The authors acknowledge this challenge and suggest incorporating more advanced modeling techniques to improve the reliability of the predictions.
Additionally, the paper does not extensively explore the robustness of the proposed algorithm to sensor failures or other types of system disruptions. Further research could investigate the system's ability to gracefully handle unexpected situations and maintain its performance under various failure modes.
Another area for potential improvement is the consideration of more complex agent behaviors, such as communication or coordination between the agents. Incorporating these aspects could lead to more sophisticated navigation strategies and better overall system performance.
Conclusion
This paper presents a novel path planning approach for a Cooperative Navigation Aid (CNA) vehicle that aims to provide effective navigation assistance to multiple agents in a shared environment. The key contribution is the formulation of the path planning problem to account for the intermittent presence and unpredictable motion of the assisted agents, while also considering factors like energy efficiency and safety.
The proposed approach has the potential to enhance the effectiveness of navigation support systems in a wide range of applications, from autonomous transportation to assistive robotics. However, further research is needed to address the limitations mentioned, such as improving the reliability of agent movement predictions and exploring more complex agent behaviors.
Overall, this paper represents an important step forward in the development of cooperative navigation systems that can adaptively support multiple agents in dynamic and uncertain environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Path Planning for a Cooperative Navigation Aid Vehicle to Assist Multiple Agents Sequentially
Artur Wolek
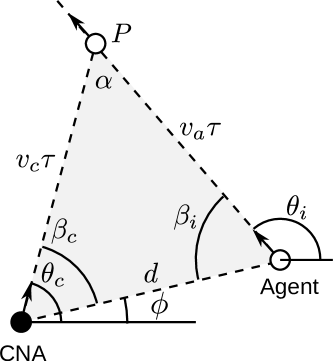
This paper considers planning a path for a single underwater cooperative navigation aid (CNA) vehicle to sequentially aid a set of N agents to minimize average navigation uncertainty. Both the CNA and agents are modeled as constant-velocity vehicles. The agents travel along known nominal trajectories and the CNA plans a path to sequentially intercept them. Navigation aiding is modeled by a scalar discrete time Kalman filter. During path planning, the CNA considers surfacing to reduce its own navigation uncertainty. A greedy planning algorithm is proposed that uses a heuristic to schedule agents to the CNA that is based on the optimal time-to-aid, the overall navigation uncertainty reduction, and the transit time. The approach is compared to an optimal (exhaustive enumeration) algorithm through a Monte Carlo experiment with randomized agent trajectories and initial navigation uncertainty.
Read more7/10/2024
0
New!Fully Distributed Cooperative Multi-agent Underwater Obstacle Avoidance
Kanzhong Yao, Ognjen Marjanovic, Simon Watson
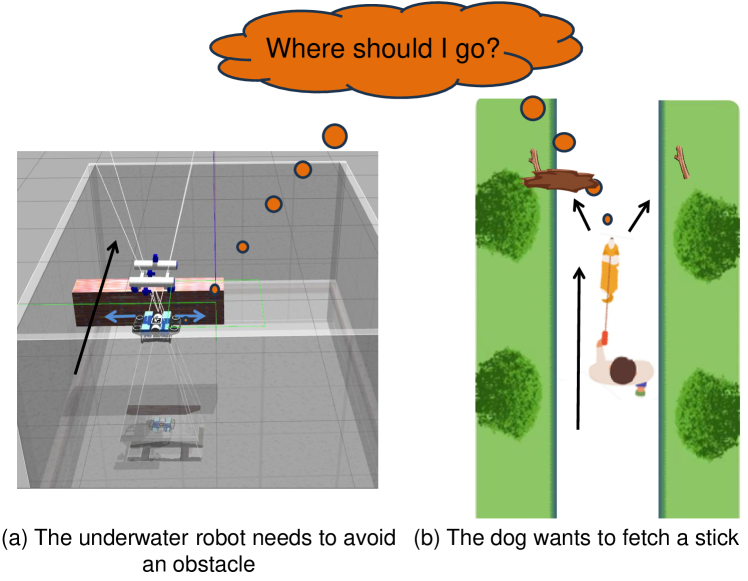
Navigation in cluttered underwater environments is challenging, especially when there are constraints on communication and self-localisation. Part of the fully distributed underwater navigation problem has been resolved by introducing multi-agent robot teams [1], however when the environment becomes cluttered, the problem remains unresolved. In this paper, we first studied the connection between everyday activity of dog walking and the cooperative underwater obstacle avoidance problem. Inspired by this analogy, we propose a novel dog walking paradigm and implement it in a multi-agent underwater system. Simulations were conducted across various scenarios, with performance benchmarked against traditional methods utilising Image-Based Visual Servoing in a multi-agent setup. Results indicate that our dog walking-inspired paradigm significantly enhances cooperative behavior among agents and outperforms the existing approach in navigating through obstacles.
Read more9/18/2024
0
Real-World Deployment of a Hierarchical Uncertainty-Aware Collaborative Multiagent Planning System
Martina Stadler Kurtz, Samuel Prentice, Yasmin Veys, Long Quang, Carlos Nieto-Granda, Michael Novitzky, Ethan Stump, Nicholas Roy
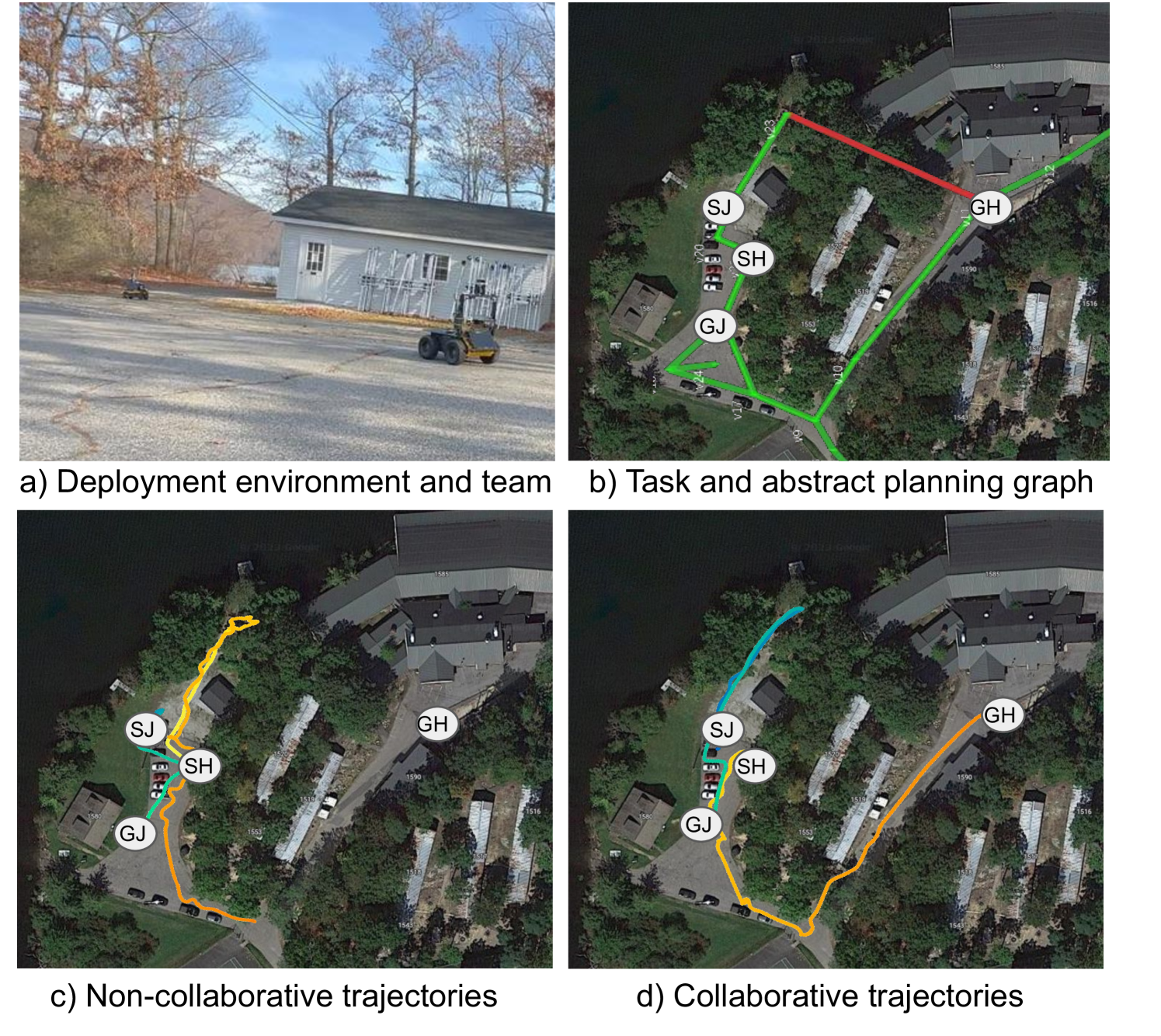
We would like to enable a collaborative multiagent team to navigate at long length scales and under uncertainty in real-world environments. In practice, planning complexity scales with the number of agents in the team, with the length scale of the environment, and with environmental uncertainty. Enabling tractable planning requires developing abstract models that can represent complex, high-quality plans. However, such models often abstract away information needed to generate directly-executable plans for real-world agents in real-world environments, as planning in such detail, especially in the presence of real-world uncertainty, would be computationally intractable. In this paper, we describe the deployment of a planning system that used a hierarchy of planners to execute collaborative multiagent navigation tasks in real-world, unknown environments. By developing a planning system that was robust to failures at every level of the planning hierarchy, we enabled the team to complete collaborative navigation tasks, even in the presence of imperfect planning abstractions and real-world uncertainty. We deployed our approach on a Clearpath Husky-Jackal team navigating in a structured outdoor environment, and demonstrated that the system enabled the agents to successfully execute collaborative plans.
Read more4/29/2024

0
Motion Primitives Planning For Center-Articulated Vehicles
Jiangpeng Hu, Fan Yang, Fang Nan, Marco Hutter
Autonomous navigation across unstructured terrains, including forests and construction areas, faces unique challenges due to intricate obstacles and the element of the unknown. Lacking pre-existing maps, these scenarios necessitate a motion planning approach that combines agility with efficiency. Critically, it must also incorporate the robot's kinematic constraints to navigate more effectively through complex environments. This work introduces a novel planning method for center-articulated vehicles (CAV), leveraging motion primitives within a receding horizon planning framework using onboard sensing. The approach commences with the offline creation of motion primitives, generated through forward simulations that reflect the distinct kinematic model of center-articulated vehicles. These primitives undergo evaluation through a heuristic-based scoring function, facilitating the selection of the most suitable path for real-time navigation. To augment this planning process, we develop a pose-stabilizing controller, tailored to the kinematic specifications of center-articulated vehicles. During experiments, our method demonstrates a $67%$ improvement in SPL (Success Rate weighted by Path Length) performance over existing strategies. Furthermore, its efficacy was validated through real-world experiments conducted with a tree harvester vehicle - SAHA.
Read more5/28/2024