Fusion LiDAR-Inertial-Encoder data for High-Accuracy SLAM

0
Sign in to get full access
Overview
- This paper presents a fusion of LiDAR, inertial, and encoder data for high-accuracy SLAM (Simultaneous Localization and Mapping).
- The proposed approach combines different sensor modalities to improve the robustness and accuracy of SLAM systems, addressing the limitations of individual sensors.
- The fusion of these sensors enables the system to handle a variety of environments and achieve better localization and mapping performance.
Plain English Explanation
The paper describes a way to combine different types of sensors to create a more accurate and reliable SLAM system. SLAM is a technology used in robots and autonomous vehicles to understand their surroundings and figure out where they are.
The key idea is to fuse data from LiDAR, which uses lasers to create a 3D map of the environment, inertial sensors that measure movement, and odometry sensors that track the vehicle's motion. By combining these different sources of information, the system can overcome the limitations of any single sensor and provide a more complete and accurate understanding of the robot's location and the surrounding environment.
This fusion approach allows the SLAM system to work reliably in a wide range of environments, from indoor spaces to outdoor areas with varying terrain and lighting conditions. The improved localization and mapping performance can be valuable for applications like autonomous navigation, augmented reality, and robotic exploration.
Technical Explanation
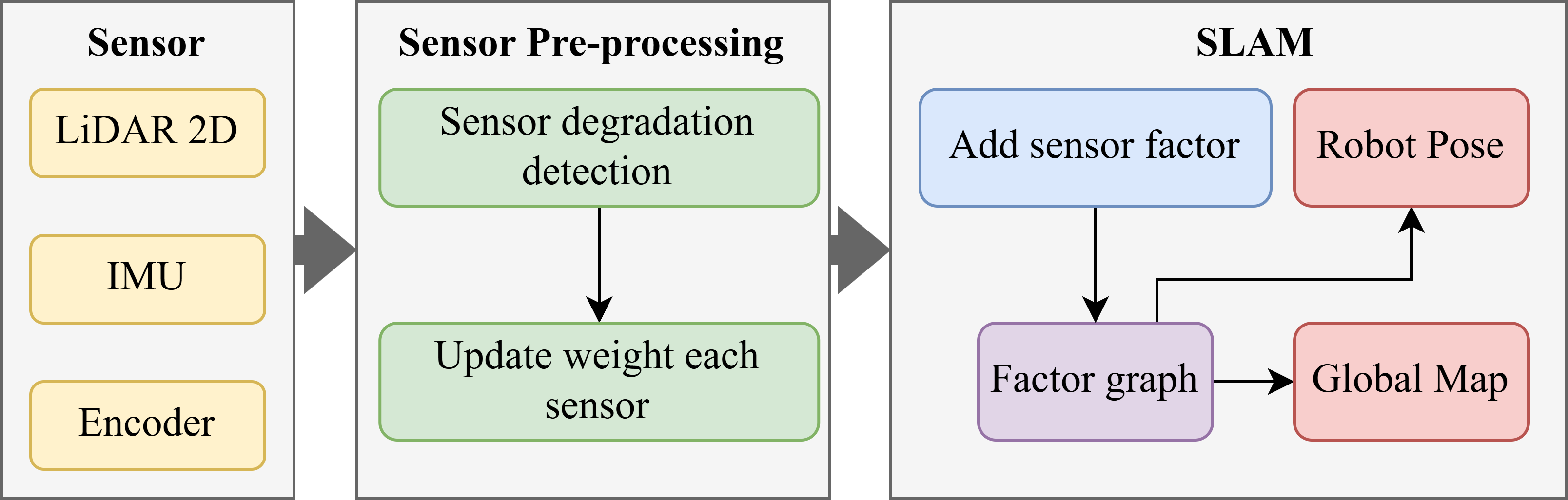
The paper presents a SLAM system that fuses data from LiDAR, inertial measurement units (IMUs), and wheel encoders to achieve high-accuracy localization and mapping. The proposed approach leverages the complementary strengths of these sensor modalities to address the limitations of individual sensors.
The system uses a factor graph formulation to represent the SLAM problem, where different sensor measurements are incorporated as factors. The LiDAR point clouds are used to construct a 3D map of the environment, while the inertial and encoder data provide additional constraints on the robot's motion and pose.
The fusion of these sensor inputs enables the system to handle a variety of environments, including challenging scenarios with limited GPS coverage or featureless areas. The SE(2) constraints derived from the wheel encoders help to improve the overall robustness and accuracy of the SLAM solution.
Experimental results demonstrate the effectiveness of the proposed approach, showing improved localization and mapping performance compared to SLAM systems that rely on a single sensor modality.
Critical Analysis
The paper provides a comprehensive and well-designed approach to fusing LiDAR, inertial, and encoder data for high-accuracy SLAM. However, some potential limitations and areas for further research are worth considering:
- The paper does not explicitly address the computational complexity and real-time performance of the proposed system, which is an important factor for practical deployment in autonomous systems.
- The experiments were conducted in relatively controlled environments, and the authors acknowledge the need for further validation in more challenging, real-world scenarios.
- The fusion of sensor data relies on careful calibration and synchronization, which can be a time-consuming and error-prone process. Techniques to automate or simplify the calibration process could be explored.
- While the fusion of multiple sensors improves overall performance, the individual contributions of each sensor modality and their relative importance in different environments are not well-documented.
Future research could focus on optimizing the computational efficiency of the fusion algorithms, exploring alternative sensor fusion techniques, and conducting more extensive field testing to validate the system's robustness in diverse real-world settings.
Conclusion
This paper presents a promising approach to fusing LiDAR, inertial, and encoder data for high-accuracy SLAM. By combining the strengths of these sensor modalities, the proposed system can achieve robust localization and mapping performance in a wide range of environments, with potential applications in autonomous navigation, augmented reality, and robotic exploration.
The technical and experimental results demonstrate the effectiveness of the fusion-based SLAM approach, paving the way for further advancements in sensor integration and multimodal perception for autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Fusion LiDAR-Inertial-Encoder data for High-Accuracy SLAM
Manh Do Duc, Thanh Nguyen Canh, Minh DoNgoc, Xiem HoangVan
In the realm of robotics, achieving simultaneous localization and mapping (SLAM) is paramount for autonomous navigation, especially in challenging environments like texture-less structures. This paper proposed a factor-graph-based model that tightly integrates IMU and encoder sensors to enhance positioning in such environments. The system operates by meticulously evaluating the data from each sensor. Based on these evaluations, weights are dynamically adjusted to prioritize the more reliable source of information at any given moment. The robot's state is initialized using IMU data, while the encoder aids motion estimation in long corridors. Discrepancies between the two states are used to correct IMU drift. The effectiveness of this method is demonstrably validated through experimentation. Compared to Karto SLAM, a widely used SLAM algorithm, this approach achieves an improvement of 26.98% in rotation angle error and 67.68% reduction in position error. These results convincingly demonstrate the method's superior accuracy and robustness in texture-less environments.
Read more7/18/2024

0
From Underground Mines to Offices: A Versatile and Robust Framework for Range-Inertial SLAM
Lorenzo Montano-Oliv'an, Julio A. Placed, Luis Montano, Mar'ia T. L'azaro
Simultaneous Localization and Mapping (SLAM) is an essential component of autonomous robotic applications and self-driving vehicles, enabling them to understand and operate in their environment. Many SLAM systems have been proposed in the last decade, but they are often complex to adapt to different settings or sensor setups. In this work, we present LiDAR Graph-SLAM (LG-SLAM), a versatile range-inertial SLAM framework that can be adapted to different types of sensors and environments, from underground mines to offices with minimal parameter tuning. Our system integrates range, inertial and GNSS measurements into a graph-based optimization framework. We also use a refined submap management approach and a robust loop closure method that effectively accounts for uncertainty in the identification and validation of putative loop closures, ensuring global consistency and robustness. Enabled by a parallelized architecture and GPU integration, our system achieves pose estimation at LiDAR frame rate, along with online loop closing and graph optimization. We validate our system in diverse environments using public datasets and real-world data, consistently achieving an average error below 20 cm and outperforming other state-of-the-art algorithms.
Read more7/23/2024

0
2DLIW-SLAM:2D LiDAR-Inertial-Wheel Odometry with Real-Time Loop Closure
Bin Zhang, Zexin Peng, Bi Zeng, Junjie Lu
Due to budgetary constraints, indoor navigation typically employs 2D LiDAR rather than 3D LiDAR. However, the utilization of 2D LiDAR in Simultaneous Localization And Mapping (SLAM) frequently encounters challenges related to motion degeneracy, particularly in geometrically similar environments. To address this problem, this paper proposes a robust, accurate, and multi-sensor-fused 2D LiDAR SLAM system specifically designed for indoor mobile robots. To commence, the original LiDAR data undergoes meticulous processing through point and line extraction. Leveraging the distinctive characteristics of indoor environments, line-line constraints are established to complement other sensor data effectively, thereby augmenting the overall robustness and precision of the system. Concurrently, a tightly-coupled front-end is created, integrating data from the 2D LiDAR, IMU, and wheel odometry, thus enabling real-time state estimation. Building upon this solid foundation, a novel global feature point matching-based loop closure detection algorithm is proposed. This algorithm proves highly effective in mitigating front-end accumulated errors and ultimately constructs a globally consistent map. The experimental results indicate that our system fully meets real-time requirements. When compared to Cartographer, our system not only exhibits lower trajectory errors but also demonstrates stronger robustness, particularly in degeneracy problem.
Read more4/24/2024
🌐
0
DVI-SLAM: A Dual Visual Inertial SLAM Network
Xiongfeng Peng, Zhihua Liu, Weiming Li, Ping Tan, SoonYong Cho, Qiang Wang
Recent deep learning based visual simultaneous localization and mapping (SLAM) methods have made significant progress. However, how to make full use of visual information as well as better integrate with inertial measurement unit (IMU) in visual SLAM has potential research value. This paper proposes a novel deep SLAM network with dual visual factors. The basic idea is to integrate both photometric factor and re-projection factor into the end-to-end differentiable structure through multi-factor data association module. We show that the proposed network dynamically learns and adjusts the confidence maps of both visual factors and it can be further extended to include the IMU factors as well. Extensive experiments validate that our proposed method significantly outperforms the state-of-the-art methods on several public datasets, including TartanAir, EuRoC and ETH3D-SLAM. Specifically, when dynamically fusing the three factors together, the absolute trajectory error for both monocular and stereo configurations on EuRoC dataset has reduced by 45.3% and 36.2% respectively.
Read more5/28/2024