Gait Recognition in Large-scale Free Environment via Single LiDAR

0
👁️
Sign in to get full access
Overview
- Human gait recognition is crucial in various real-world applications, such as smart homes, healthcare, and non-intrusive security
- LiDAR technology is promising for gait recognition due to its ability to capture depth information
- This paper presents a novel Hierarchical Multi-representation Feature Interaction Network (HMRNet) for robust gait recognition using a single LiDAR sensor
- The authors also introduce FreeGait, a comprehensive gait dataset from large-scale, unconstrained settings, to facilitate LiDAR-based gait recognition research
Plain English Explanation
Identifying people based on how they walk, also known as gait recognition, is an important technology for various real-world applications. For example, it can be used in smart homes to automatically recognize residents, in healthcare to monitor patient mobility, and in security systems to identify individuals without direct interaction.
LiDAR, a technology that can measure the distance to objects using lasers, has the potential to improve gait recognition. LiDAR can capture depth information, which can provide valuable insights into a person's walking patterns. This paper presents a new deep learning model called the Hierarchical Multi-representation Feature Interaction Network (HMRNet) that uses a single LiDAR sensor to perform robust gait recognition.
To support this research, the authors also introduce a new dataset called FreeGait, which contains a large and diverse collection of gait data captured in unconstrained, real-world settings. This dataset aims to bridge the gap between controlled lab environments and the messy, unpredictable real world, providing a more realistic testbed for gait recognition algorithms.
Technical Explanation
The researchers developed the Hierarchical Multi-representation Feature Interaction Network (HMRNet) to address the challenge of gait recognition using a single LiDAR sensor. HMRNet is designed to extract and integrate multiple representations of gait features, including point cloud and skeleton data, to improve the model's robustness and performance.
The key components of HMRNet include:
- A multi-view feature extraction module that generates distinct representations of the gait data
- A hierarchical feature interaction module that captures the relationships between these different feature representations
- A final classification module that combines the fused features to predict the individual's identity
To evaluate their approach, the researchers tested HMRNet on the existing SUSTech1K dataset, as well as their newly introduced FreeGait dataset. FreeGait contains a much larger and more diverse collection of gait data captured in uncontrolled, real-world environments, unlike previous datasets that were primarily derived from controlled lab settings.
The results show that HMRNet achieves state-of-the-art performance on both the SUSTech1K and FreeGait datasets, demonstrating the effectiveness of their hierarchical feature interaction approach for robust gait recognition using LiDAR.
Critical Analysis
The researchers have made a valuable contribution to the field of gait recognition by introducing a novel deep learning model, HMRNet, and a new large-scale dataset, FreeGait, to support LiDAR-based gait recognition research.
One potential limitation of the study is the reliance on a single LiDAR sensor. While this approach is practical and cost-effective, it may not capture the full richness of gait information that could be obtained from a multi-sensor setup, such as combining LiDAR with cameras or other modalities. Further research could explore the benefits of multimodal sensor fusion for gait recognition.
Additionally, the FreeGait dataset, while a significant improvement over previous datasets, may still not fully represent the diversity and unpredictability of real-world environments. Continued efforts to expand and diversify gait datasets could further enhance the development of robust gait recognition algorithms.
Another area for potential research is the exploration of alternative gait recognition approaches, such as those that can work with highly compressed video data or leverage millimeter-wave radar signals, which may offer additional advantages in terms of privacy, cost, or accessibility.
Conclusion
This paper presents a significant advancement in the field of LiDAR-based gait recognition, with the introduction of the Hierarchical Multi-representation Feature Interaction Network (HMRNet) and the FreeGait dataset. The research demonstrates the potential of LiDAR technology to enable robust gait recognition, with potential applications in smart homes, healthcare, and non-intrusive security systems.
The development of HMRNet and the FreeGait dataset represents an important step forward in bridging the gap between controlled lab environments and the real-world challenges faced by gait recognition systems. As the field continues to evolve, further research and innovation in multimodal sensor fusion, diverse dataset creation, and alternative gait recognition approaches could lead to even more advanced and practical solutions for a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
0
Gait Recognition in Large-scale Free Environment via Single LiDAR
Xiao Han, Yiming Ren, Peishan Cong, Yujing Sun, Jingya Wang, Lan Xu, Yuexin Ma
Human gait recognition is crucial in multimedia, enabling identification through walking patterns without direct interaction, enhancing the integration across various media forms in real-world applications like smart homes, healthcare and non-intrusive security. LiDAR's ability to capture depth makes it pivotal for robotic perception and holds promise for real-world gait recognition. In this paper, based on a single LiDAR, we present the Hierarchical Multi-representation Feature Interaction Network (HMRNet) for robust gait recognition. Prevailing LiDAR-based gait datasets primarily derive from controlled settings with predefined trajectory, remaining a gap with real-world scenarios. To facilitate LiDAR-based gait recognition research, we introduce FreeGait, a comprehensive gait dataset from large-scale, unconstrained settings, enriched with multi-modal and varied 2D/3D data. Notably, our approach achieves state-of-the-art performance on prior dataset (SUSTech1K) and on FreeGait.
Read more10/2/2024
0
Camera-LiDAR Cross-modality Gait Recognition
Wenxuan Guo, Yingping Liang, Zhiyu Pan, Ziheng Xi, Jianjiang Feng, Jie Zhou
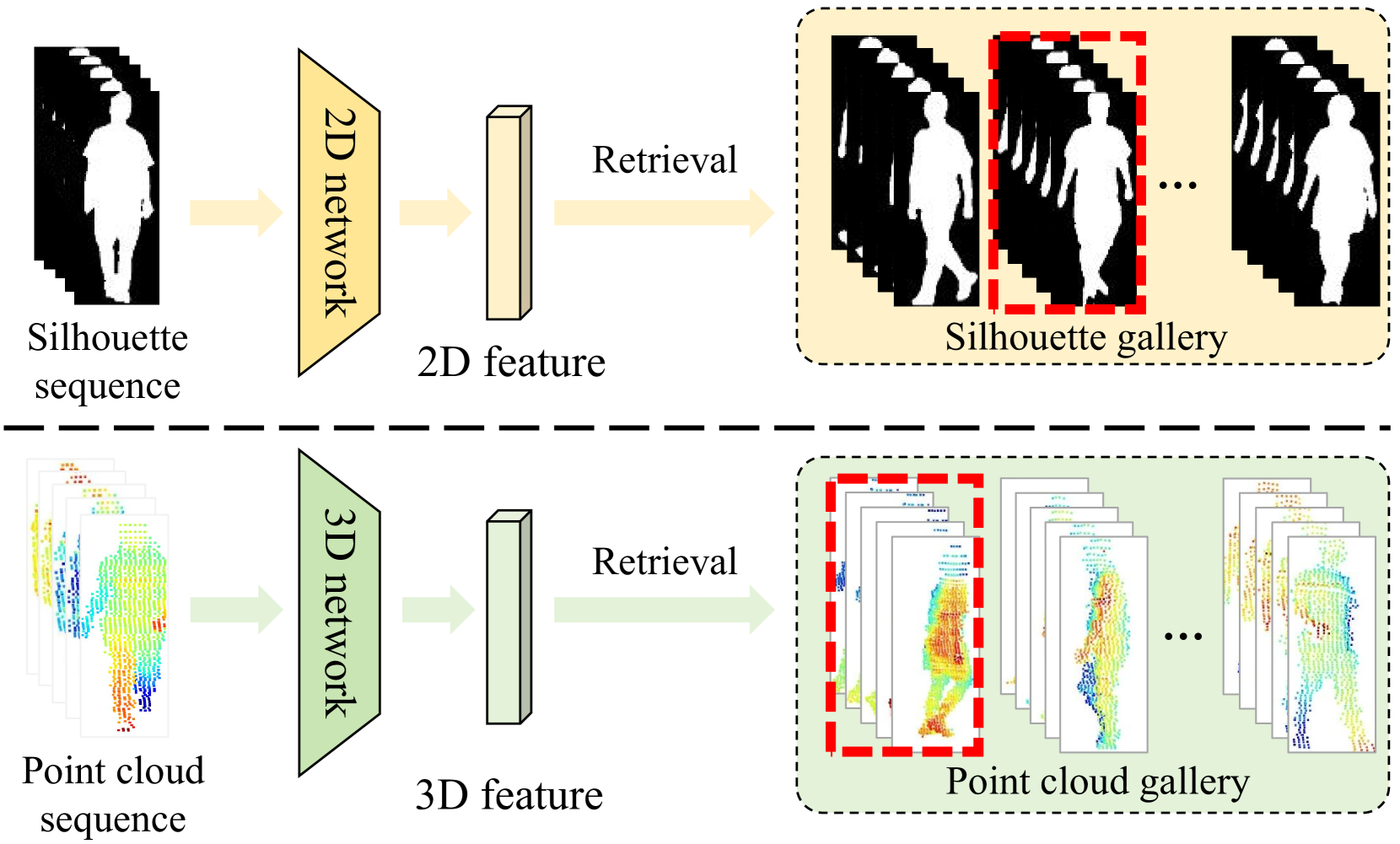
Gait recognition is a crucial biometric identification technique. Camera-based gait recognition has been widely applied in both research and industrial fields. LiDAR-based gait recognition has also begun to evolve most recently, due to the provision of 3D structural information. However, in certain applications, cameras fail to recognize persons, such as in low-light environments and long-distance recognition scenarios, where LiDARs work well. On the other hand, the deployment cost and complexity of LiDAR systems limit its wider application. Therefore, it is essential to consider cross-modality gait recognition between cameras and LiDARs for a broader range of applications. In this work, we propose the first cross-modality gait recognition framework between Camera and LiDAR, namely CL-Gait. It employs a two-stream network for feature embedding of both modalities. This poses a challenging recognition task due to the inherent matching between 3D and 2D data, exhibiting significant modality discrepancy. To align the feature spaces of the two modalities, i.e., camera silhouettes and LiDAR points, we propose a contrastive pre-training strategy to mitigate modality discrepancy. To make up for the absence of paired camera-LiDAR data for pre-training, we also introduce a strategy for generating data on a large scale. This strategy utilizes monocular depth estimated from single RGB images and virtual cameras to generate pseudo point clouds for contrastive pre-training. Extensive experiments show that the cross-modality gait recognition is very challenging but still contains potential and feasibility with our proposed model and pre-training strategy. To the best of our knowledge, this is the first work to address cross-modality gait recognition.
Read more7/8/2024
🤯
0
Cross-Modality Gait Recognition: Bridging LiDAR and Camera Modalities for Human Identification
Rui Wang, Chuanfu Shen, Manuel J. Marin-Jimenez, George Q. Huang, Shiqi Yu
Current gait recognition research mainly focuses on identifying pedestrians captured by the same type of sensor, neglecting the fact that individuals may be captured by different sensors in order to adapt to various environments. A more practical approach should involve cross-modality matching across different sensors. Hence, this paper focuses on investigating the problem of cross-modality gait recognition, with the objective of accurately identifying pedestrians across diverse vision sensors. We present CrossGait inspired by the feature alignment strategy, capable of cross retrieving diverse data modalities. Specifically, we investigate the cross-modality recognition task by initially extracting features within each modality and subsequently aligning these features across modalities. To further enhance the cross-modality performance, we propose a Prototypical Modality-shared Attention Module that learns modality-shared features from two modality-specific features. Additionally, we design a Cross-modality Feature Adapter that transforms the learned modality-specific features into a unified feature space. Extensive experiments conducted on the SUSTech1K dataset demonstrate the effectiveness of CrossGait: (1) it exhibits promising cross-modality ability in retrieving pedestrians across various modalities from different sensors in diverse scenes, and (2) CrossGait not only learns modality-shared features for cross-modality gait recognition but also maintains modality-specific features for single-modality recognition.
Read more4/8/2024

0
LiCAF: LiDAR-Camera Asymmetric Fusion for Gait Recognition
Yunze Deng, Haijun Xiong, Bin Feng
Gait recognition is a biometric technology that identifies individuals by using walking patterns. Due to the significant achievements of multimodal fusion in gait recognition, we consider employing LiDAR-camera fusion to obtain robust gait representations. However, existing methods often overlook intrinsic characteristics of modalities, and lack fine-grained fusion and temporal modeling. In this paper, we introduce a novel modality-sensitive network LiCAF for LiDAR-camera fusion, which employs an asymmetric modeling strategy. Specifically, we propose Asymmetric Cross-modal Channel Attention (ACCA) and Interlaced Cross-modal Temporal Modeling (ICTM) for cross-modal valuable channel information selection and powerful temporal modeling. Our method achieves state-of-the-art performance (93.9% in Rank-1 and 98.8% in Rank-5) on the SUSTech1K dataset, demonstrating its effectiveness.
Read more6/19/2024