Identifying latent state transition in non-linear dynamical systems
2406.03337
0
0
Abstract
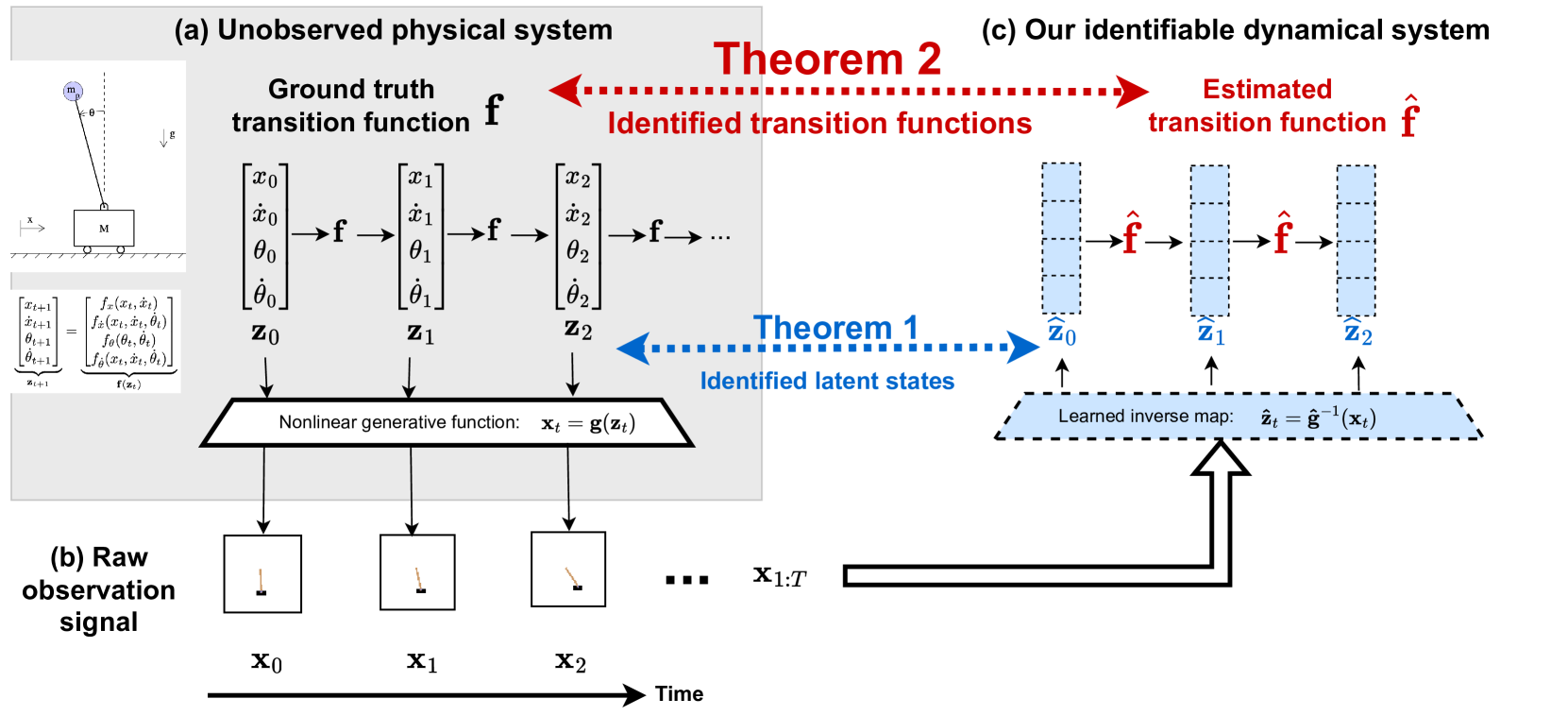
This work aims to improve generalization and interpretability of dynamical systems by recovering the underlying lower-dimensional latent states and their time evolutions. Previous work on disentangled representation learning within the realm of dynamical systems focused on the latent states, possibly with linear transition approximations. As such, they cannot identify nonlinear transition dynamics, and hence fail to reliably predict complex future behavior. Inspired by the advances in nonlinear ICA, we propose a state-space modeling framework in which we can identify not just the latent states but also the unknown transition function that maps the past states to the present. We introduce a practical algorithm based on variational auto-encoders and empirically demonstrate in realistic synthetic settings that we can (i) recover latent state dynamics with high accuracy, (ii) correspondingly achieve high future prediction accuracy, and (iii) adapt fast to new environments.
Create account to get full access
Overview
- This paper explores techniques for identifying latent state transitions in non-linear dynamical systems.
- The researchers investigate the concept of identifiability, which refers to the ability to reliably estimate the underlying state variables from observed data.
- They present methods for learning interpretable representations of complex systems, such as exponential family dynamical systems (XFADS) and Gaussian process learning of nonlinear dynamics.
- The paper also discusses challenges in learning identifiable latent states in nonstationary systems and marrying causal representation learning with dynamical systems science.
Plain English Explanation
This research paper focuses on understanding complex systems that change over time, such as the weather, the stock market, or the human body. The researchers are interested in being able to accurately predict how these systems will behave in the future, but to do this, they need to first understand the underlying "hidden" or "latent" factors that drive the system's behavior.
For example, in the case of the weather, the latent factors might include things like temperature, humidity, and air pressure. If we can measure and track these factors, we can better predict things like rainfall or temperature changes. However, directly measuring all the relevant latent factors is often very difficult or impossible.
The researchers in this paper explore ways to infer the latent factors that are driving a complex system, even when we can't directly observe them. They use sophisticated mathematical and statistical techniques to analyze the observable data about the system and "reverse engineer" the underlying latent states. This allows them to build more accurate models of the system's behavior and make better predictions about its future evolution.
The key challenge is ensuring that the inferred latent states are truly "identifiable" - meaning that they can be reliably estimated from the data and correspond to meaningful aspects of the real-world system. The researchers investigate different approaches to achieving this identifiability, such as using exponential family dynamical systems or Gaussian process learning.
They also examine how to handle cases where the system is "nonstationary" - meaning that the underlying dynamics are changing over time. This adds an additional layer of complexity that the researchers need to address. Finally, they consider how to integrate ideas from causal reasoning and representation learning to develop a more holistic understanding of the system's behavior.
Overall, this research aims to advance our ability to model and predict the behavior of complex, dynamic systems in fields like engineering, biology, and economics. By uncovering the hidden drivers of these systems, the researchers hope to unlock new insights and enable better decision-making.
Technical Explanation
The core challenge addressed in this paper is the problem of identifiability in non-linear dynamical systems. Identifiability refers to the ability to reliably estimate the underlying "latent" state variables of a system from observed data.
The researchers explore techniques for learning interpretable representations of complex, time-varying systems. They investigate the use of exponential family dynamical systems (XFADS) and Gaussian process learning of nonlinear dynamics as approaches to this problem.
A key challenge is dealing with nonstationarity - situations where the underlying dynamics of the system are changing over time. The paper discusses methods for learning identifiable latent states in nonstationary systems and the importance of integrating ideas from causal representation learning with dynamical systems science, as explored in the marrying causal representation learning with dynamical systems science paper.
The researchers present a range of experimental results and case studies to demonstrate the effectiveness of their proposed techniques. They show how these methods can be applied to model and predict the behavior of complex, time-varying systems in fields such as engineering, biology, and economics.
Critical Analysis
The paper makes a compelling case for the importance of identifiability in non-linear dynamical systems and presents several promising technical approaches to address this challenge. However, the researchers acknowledge that there are still significant limitations and open questions in this area.
One key limitation is the difficulty of ensuring identifiability in highly complex, nonstationary systems. While the techniques discussed, such as XFADS and Gaussian process learning, can be effective in certain scenarios, there may be inherent challenges in reliably recovering the underlying latent states in more realistic, noisy, and rapidly evolving systems.
Additionally, the paper does not fully address the potential issues of interpretability and transparency that can arise when dealing with complex, black-box models. While the researchers emphasize the importance of learning "interpretable representations," the practical implementation of this in real-world applications may be challenging.
Further research is also needed to better understand the interplay between causal reasoning, representation learning, and dynamical systems modeling, as highlighted in the marrying causal representation learning with dynamical systems science paper. Integrating these disparate fields is a promising but non-trivial endeavor.
Overall, this paper makes valuable contributions to the field of non-linear dynamical systems modeling, but there remain significant opportunities for further advancement and exploration of the key issues surrounding identifiability, interpretability, and the broader integration of causal reasoning and representation learning into dynamical systems science.
Conclusion
This research paper tackles the important challenge of identifying latent state transitions in complex, non-linear dynamical systems. The researchers investigate techniques for learning interpretable representations of these systems, such as exponential family dynamical systems and Gaussian process learning of nonlinear dynamics.
A key focus is on the concept of identifiability - the ability to reliably estimate the underlying "hidden" state variables that drive the system's behavior. The paper also examines the challenges of dealing with nonstationarity, where the system's dynamics are changing over time, and explores ways to integrate causal reasoning and representation learning into dynamical systems modeling.
While the proposed methods show promise, the researchers acknowledge the inherent difficulties in ensuring identifiability in highly complex, real-world systems. Further research is needed to address issues of interpretability, transparency, and the deeper integration of causal and dynamical systems approaches.
Overall, this work represents an important step forward in our ability to model and predict the behavior of complex, time-varying systems across a range of scientific and engineering domains. As our world becomes increasingly interconnected and dynamic, the ability to reliably uncover the hidden drivers of system behavior will be crucial for unlocking new insights and enabling better decision-making.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏷️
On the Identifiability of Switching Dynamical Systems
Carles Balsells-Rodas, Yixin Wang, Yingzhen Li
0
0
The identifiability of latent variable models has received increasing attention due to its relevance in interpretability and out-of-distribution generalisation. In this work, we study the identifiability of Switching Dynamical Systems, taking an initial step toward extending identifiability analysis to sequential latent variable models. We first prove the identifiability of Markov Switching Models, which commonly serve as the prior distribution for the continuous latent variables in Switching Dynamical Systems. We present identification conditions for first-order Markov dependency structures, whose transition distribution is parametrised via non-linear Gaussians. We then establish the identifiability of the latent variables and non-linear mappings in Switching Dynamical Systems up to affine transformations, by leveraging identifiability analysis techniques from identifiable deep latent variable models. We finally develop estimation algorithms for identifiable Switching Dynamical Systems. Throughout empirical studies, we demonstrate the practicality of identifiable Switching Dynamical Systems for segmenting high-dimensional time series such as videos, and showcase the use of identifiable Markov Switching Models for regime-dependent causal discovery in climate data.
6/5/2024

eXponential FAmily Dynamical Systems (XFADS): Large-scale nonlinear Gaussian state-space modeling
Matthew Dowling, Yuan Zhao, Il Memming Park
0
0
State-space graphical models and the variational autoencoder framework provide a principled apparatus for learning dynamical systems from data. State-of-the-art probabilistic approaches are often able to scale to large problems at the cost of flexibility of the variational posterior or expressivity of the dynamics model. However, those consolidations can be detrimental if the ultimate goal is to learn a generative model capable of explaining the spatiotemporal structure of the data and making accurate forecasts. We introduce a low-rank structured variational autoencoding framework for nonlinear Gaussian state-space graphical models capable of capturing dense covariance structures that are important for learning dynamical systems with predictive capabilities. Our inference algorithm exploits the covariance structures that arise naturally from sample based approximate Gaussian message passing and low-rank amortized posterior updates -- effectively performing approximate variational smoothing with time complexity scaling linearly in the state dimensionality. In comparisons with other deep state-space model architectures our approach consistently demonstrates the ability to learn a more predictive generative model. Furthermore, when applied to neural physiological recordings, our approach is able to learn a dynamical system capable of forecasting population spiking and behavioral correlates from a small portion of single trials.
6/3/2024

When and How: Learning Identifiable Latent States for Nonstationary Time Series Forecasting
Zijian Li, Ruichu Cai, Zhenhui Yang, Haiqin Huang, Guangyi Chen, Yifan Shen, Zhengming Chen, Xiangchen Song, Kun Zhang
0
0
Temporal distribution shifts are ubiquitous in time series data. One of the most popular methods assumes that the temporal distribution shift occurs uniformly to disentangle the stationary and nonstationary dependencies. But this assumption is difficult to meet, as we do not know when the distribution shifts occur. To solve this problem, we propose to learn IDentifiable latEnt stAtes (IDEA) to detect when the distribution shifts occur. Beyond that, we further disentangle the stationary and nonstationary latent states via sufficient observation assumption to learn how the latent states change. Specifically, we formalize the causal process with environment-irrelated stationary and environment-related nonstationary variables. Under mild conditions, we show that latent environments and stationary/nonstationary variables are identifiable. Based on these theories, we devise the IDEA model, which incorporates an autoregressive hidden Markov model to estimate latent environments and modular prior networks to identify latent states. The IDEA model outperforms several latest nonstationary forecasting methods on various benchmark datasets, highlighting its advantages in real-world scenarios.
6/10/2024
📉
PcLast: Discovering Plannable Continuous Latent States
Anurag Koul, Shivakanth Sujit, Shaoru Chen, Ben Evans, Lili Wu, Byron Xu, Rajan Chari, Riashat Islam, Raihan Seraj, Yonathan Efroni, Lekan Molu, Miro Dudik, John Langford, Alex Lamb
0
0
Goal-conditioned planning benefits from learned low-dimensional representations of rich observations. While compact latent representations typically learned from variational autoencoders or inverse dynamics enable goal-conditioned decision making, they ignore state reachability, hampering their performance. In this paper, we learn a representation that associates reachable states together for effective planning and goal-conditioned policy learning. We first learn a latent representation with multi-step inverse dynamics (to remove distracting information), and then transform this representation to associate reachable states together in $ell_2$ space. Our proposals are rigorously tested in various simulation testbeds. Numerical results in reward-based settings show significant improvements in sampling efficiency. Further, in reward-free settings this approach yields layered state abstractions that enable computationally efficient hierarchical planning for reaching ad hoc goals with zero additional samples.
6/12/2024