Gaussian Splatting to Real World Flight Navigation Transfer with Liquid Networks

0

Sign in to get full access
Overview
- The paper proposes a novel approach called "Gaussian Splatting" for real-world flight navigation in robotics.
- It introduces the "Liquid Networks" architecture to enable safe and efficient navigation in complex environments.
- The research builds upon previous work on Gaussian splatting for real-time correctable world modeling and reinforcement learning for generalizable Gaussian splatting.
Plain English Explanation
The paper presents a new way for robots to navigate the real world safely and effectively. It uses a technique called "Gaussian Splatting" to help the robot understand its surroundings in real-time. This allows the robot to quickly adjust its path and avoid obstacles as it moves around.
The researchers also developed a new "Liquid Networks" architecture that enables the robot to make smart decisions about how to navigate. This helps the robot find the safest and most efficient route to its destination, even in complex environments with lots of obstacles.
The work builds on previous research that explored using Gaussian splatting for real-time world modeling and generalizable reinforcement learning to help robots navigate. By combining these techniques, the researchers were able to create a system that can safely guide robots through the real world.
Technical Explanation
The paper introduces a new approach called "Gaussian Splatting" for real-world flight navigation in robotics. Gaussian splatting is a technique for efficiently modeling the robot's surroundings in real-time, which is essential for safe and effective navigation.
The researchers also developed a novel "Liquid Networks" architecture to enable the robot to make intelligent decisions about its navigation. Liquid Networks use a flexible, adaptive structure to allow the robot to quickly adapt its path and avoid obstacles as it moves through complex environments.
Building on previous work on Gaussian splatting for real-time world modeling and reinforcement learning for generalizeable Gaussian splatting, the researchers combined these techniques to create a system that can safely and efficiently guide robots through real-world environments.
Critical Analysis
The paper presents a promising approach for enabling safe and efficient robot navigation in complex, real-world environments. The use of Gaussian splatting and the Liquid Networks architecture appear to be effective at helping robots quickly understand and respond to their surroundings.
However, the research is focused on simulated environments and does not yet demonstrate the performance of the system in physical, real-world settings. Additional validation and testing would be needed to fully assess the capabilities and limitations of the proposed approach.
Furthermore, the paper does not address potential issues around the reliability and robustness of the system, such as how it might handle sensor failures or unexpected environmental changes. Exploring these areas could help identify opportunities for further research and development.
Overall, the work represents an interesting and potentially impactful contribution to the field of robotics navigation. By combining advanced techniques like Gaussian splatting and reinforcement learning, the researchers have developed a system that could have significant implications for real-world flight navigation, lidar-inertial camera fusion, and even learning to fly in seconds.
Conclusion
The Gaussian Splatting to Real World Flight Navigation Transfer with Liquid Networks paper presents a novel approach for enabling safe and efficient robot navigation in complex, real-world environments. By combining techniques like Gaussian splatting and reinforcement learning, the researchers have developed a flexible and adaptive system that can help robots quickly understand and respond to their surroundings.
While the work is still in the simulation stage, the proposed Liquid Networks architecture and Gaussian splatting techniques show promise for addressing key challenges in robotics navigation. Further validation and testing in physical environments could help unlock new applications and opportunities for this research, potentially leading to breakthroughs in areas like autonomous flight, lidar-inertial camera fusion, and rapid robot training.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Gaussian Splatting to Real World Flight Navigation Transfer with Liquid Networks
Alex Quach, Makram Chahine, Alexander Amini, Ramin Hasani, Daniela Rus
Simulators are powerful tools for autonomous robot learning as they offer scalable data generation, flexible design, and optimization of trajectories. However, transferring behavior learned from simulation data into the real world proves to be difficult, usually mitigated with compute-heavy domain randomization methods or further model fine-tuning. We present a method to improve generalization and robustness to distribution shifts in sim-to-real visual quadrotor navigation tasks. To this end, we first build a simulator by integrating Gaussian Splatting with quadrotor flight dynamics, and then, train robust navigation policies using Liquid neural networks. In this way, we obtain a full-stack imitation learning protocol that combines advances in 3D Gaussian splatting radiance field rendering, crafty programming of expert demonstration training data, and the task understanding capabilities of Liquid networks. Through a series of quantitative flight tests, we demonstrate the robust transfer of navigation skills learned in a single simulation scene directly to the real world. We further show the ability to maintain performance beyond the training environment under drastic distribution and physical environment changes. Our learned Liquid policies, trained on single target manoeuvres curated from a photorealistic simulated indoor flight only, generalize to multi-step hikes onboard a real hardware platform outdoors.
Read more6/24/2024
0
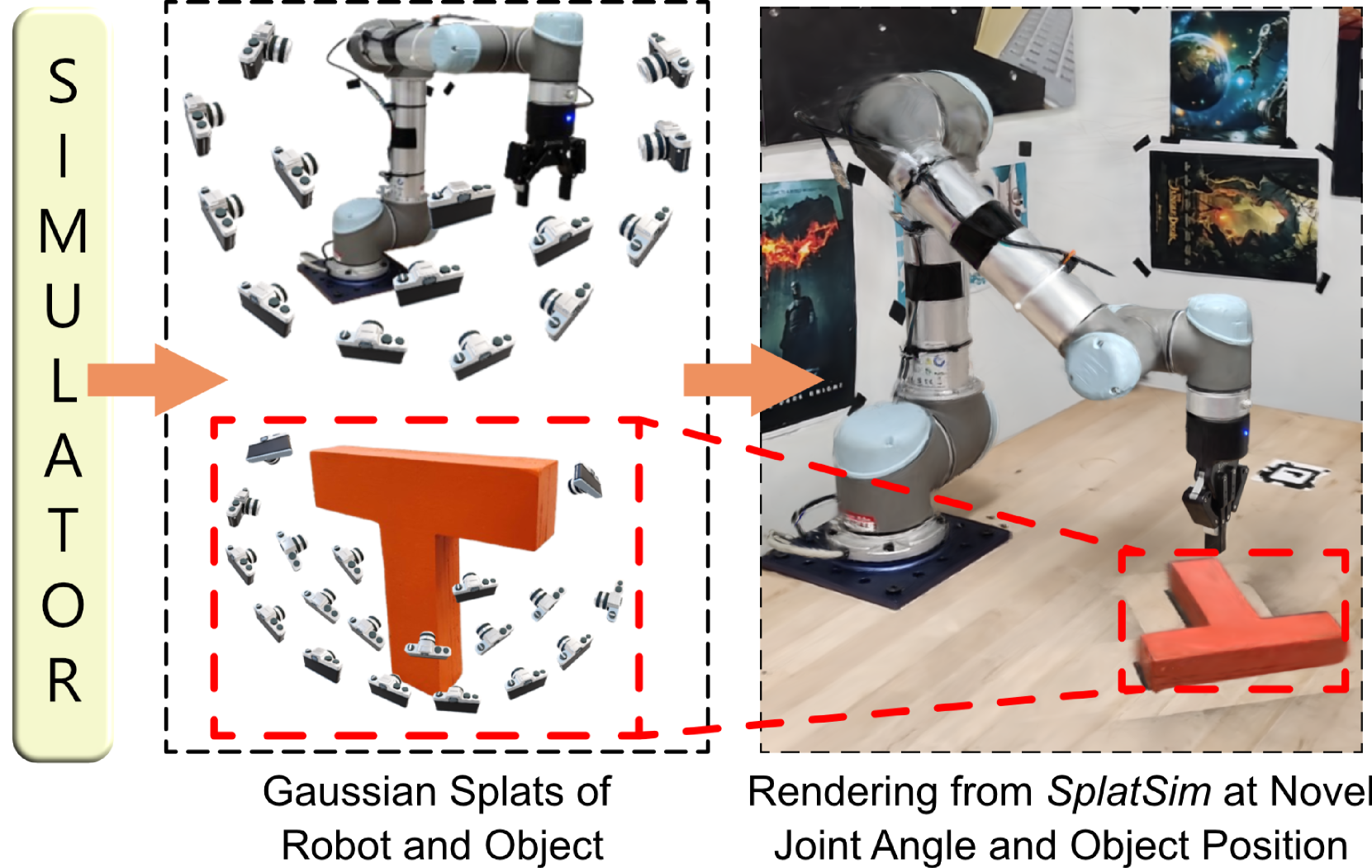
New!SplatSim: Zero-Shot Sim2Real Transfer of RGB Manipulation Policies Using Gaussian Splatting
Mohammad Nomaan Qureshi, Sparsh Garg, Francisco Yandun, David Held, George Kantor, Abhishesh Silwal
Sim2Real transfer, particularly for manipulation policies relying on RGB images, remains a critical challenge in robotics due to the significant domain shift between synthetic and real-world visual data. In this paper, we propose SplatSim, a novel framework that leverages Gaussian Splatting as the primary rendering primitive to reduce the Sim2Real gap for RGB-based manipulation policies. By replacing traditional mesh representations with Gaussian Splats in simulators, SplatSim produces highly photorealistic synthetic data while maintaining the scalability and cost-efficiency of simulation. We demonstrate the effectiveness of our framework by training manipulation policies within SplatSim}and deploying them in the real world in a zero-shot manner, achieving an average success rate of 86.25%, compared to 97.5% for policies trained on real-world data.
Read more9/17/2024

0
Splat-Nav: Safe Real-Time Robot Navigation in Gaussian Splatting Maps
Timothy Chen, Ola Shorinwa, Joseph Bruno, Javier Yu, Weijia Zeng, Keiko Nagami, Philip Dames, Mac Schwager
We present Splat-Nav, a real-time navigation pipeline designed to work with environment representations generated by Gaussian Splatting (GSplat), a popular emerging 3D scene representation from computer vision. Splat-Nav consists of two components: 1) Splat-Plan, a safe planning module, and 2) Splat-Loc, a robust pose estimation module. Splat-Plan builds a safe-by-construction polytope corridor through the map based on mathematically rigorous collision constraints and then constructs a B'ezier curve trajectory through this corridor. Splat-Loc provides a robust state estimation module, leveraging the point-cloud representation inherent in GSplat scenes for global pose initialization, in the absence of prior knowledge, and recursive real-time pose localization, given only RGB images. The most compute-intensive procedures in our navigation pipeline, such as the computation of the B'ezier trajectories and the pose optimization problem run primarily on the CPU, freeing up GPU resources for GPU-intensive tasks, such as online training of Gaussian Splats. We demonstrate the safety and robustness of our pipeline in both simulation and hardware experiments, where we show online re-planning at 5 Hz and pose estimation at about 25 Hz, an order of magnitude faster than Neural Radiance Field (NeRF)-based navigation methods, thereby enabling real-time navigation.
Read more4/30/2024

0
Physically Embodied Gaussian Splatting: A Realtime Correctable World Model for Robotics
Jad Abou-Chakra, Krishan Rana, Feras Dayoub, Niko Sunderhauf
For robots to robustly understand and interact with the physical world, it is highly beneficial to have a comprehensive representation - modelling geometry, physics, and visual observations - that informs perception, planning, and control algorithms. We propose a novel dual Gaussian-Particle representation that models the physical world while (i) enabling predictive simulation of future states and (ii) allowing online correction from visual observations in a dynamic world. Our representation comprises particles that capture the geometrical aspect of objects in the world and can be used alongside a particle-based physics system to anticipate physically plausible future states. Attached to these particles are 3D Gaussians that render images from any viewpoint through a splatting process thus capturing the visual state. By comparing the predicted and observed images, our approach generates visual forces that correct the particle positions while respecting known physical constraints. By integrating predictive physical modelling with continuous visually-derived corrections, our unified representation reasons about the present and future while synchronizing with reality. Our system runs in realtime at 30Hz using only 3 cameras. We validate our approach on 2D and 3D tracking tasks as well as photometric reconstruction quality. Videos are found at https://embodied-gaussians.github.io/.
Read more6/18/2024