A General Theory for Kernel Packets: from state space model to compactly supported basis

0
📈
Sign in to get full access
Overview
- The paper introduces a state space (SS) model formulation for Gaussian processes (GPs) that can significantly improve training and prediction time.
- The authors prove that the SS model is equivalent to a concept they call the "general right Kernel Packet (KP)": a transformation of the GP covariance function that satisfies certain mathematical properties.
- By combining left and right KPs, the authors show that a linear combination of these covariance functions can yield compact, efficient GP models.
- The KP approach can enable broader applications of GPs, including handling derivatives and kernel multiplications, and can be generalized to multi-dimensional kernels.
Plain English Explanation
Gaussian processes (GPs) are a powerful tool for machine learning, but they can be computationally expensive, especially for large datasets. The authors of this paper have found a way to speed up GPs using a state space (SS) model formulation.
The key idea is to transform the GP's covariance function in a specific way, creating what the authors call a "Kernel Packet" (KP). This KP has the property that it can be represented compactly, using only a few mathematical terms. By combining left and right KPs, the authors show that the resulting GP model can be evaluated much more quickly, with time complexity of either $\mathcal{O}(\log n)$ or $\mathcal{O}(1)$, where $n$ is the number of data points.
This KP approach also enables some additional useful capabilities, like handling the derivatives of the GP and performing kernel multiplications more efficiently. Additionally, the authors show how to generalize the KP concept to multi-dimensional kernels, which can be helpful for modeling complex, scattered data.
Overall, this paper presents a clever mathematical trick that can significantly speed up Gaussian process models, opening the door to broader applications of this powerful machine learning technique.
Technical Explanation
The authors start by observing that the state space (SS) model formulation of a Gaussian process (GP) can reduce the training and prediction time of the GP to $\mathcal{O}(n)$, where $n$ is the number of data points. They then prove that an $m$-dimensional SS model formulation of a GP is equivalent to a concept they introduce called the "general right Kernel Packet (KP)".
A right KP is a transformation of the GP's covariance function $K(t, t_i)$ such that the sum of certain weighted derivatives of $K$ evaluated at a set of $m+1$ consecutive points $t_i$ is equal to 0. Specifically, the authors show that $\sum_{i=0}^{m} a_i D_t^{(j)} K(t, t_i) = 0$ holds for any $t \leq t_1$, $0 \leq j \leq m-1$, and the $m+1$ points $t_i$.
The authors also introduce the "left KP", which is a similar transformation but for the next $m$ consecutive points: $\sum_{i=0}^{m} b_i D_t^{(j)} K(t, t_{m+i}) = 0$ for $t \geq t_{2m}$.
By combining the left and right KPs, the authors prove that a suitable linear combination of these covariance functions yields $m$ KP functions that are compactly supported on the interval $(t_0, t_{2m})$. This compact representation is what enables the improved time complexity for GP training and prediction.
The KP approach also allows for broader applications of GPs, such as handling derivatives of the GP output and performing efficient kernel multiplications. Furthermore, the authors show how to generalize the KP concept to multi-dimensional additive and product kernels, which can be useful for modeling complex, scattered data.
Critical Analysis
The paper presents a novel and mathematically rigorous approach to improving the efficiency of Gaussian process models. The authors have clearly put a lot of thought into the underlying theory and have demonstrated the practical benefits of their Kernel Packet (KP) formulation.
One potential limitation of the KP approach is that it may require some additional preprocessing or setup to determine the appropriate parameters (such as the number of KP functions, $m$). This could add some complexity to the overall modeling process, compared to standard GP methods.
Additionally, while the authors show that the KP approach can enable broader applications of GPs, such as handling derivatives and kernel multiplications, the paper does not provide a comprehensive evaluation of these extended capabilities. It would be interesting to see more detailed examples or case studies demonstrating the practical impact of these additional features.
Finally, the authors mention that the KP formulation can be generalized to multi-dimensional kernels, but they do not provide a thorough analysis of the challenges or limitations of this generalization. Further research may be needed to fully understand the implications and applicability of the KP approach in higher-dimensional settings.
Overall, this paper presents a promising and innovative approach to improving the efficiency and capabilities of Gaussian process models. The authors have made a valuable contribution to the field, and their work could inspire future research on advanced kernel methods and their applications in machine learning.
Conclusion
This paper introduces a state space (SS) model formulation for Gaussian processes (GPs) that can significantly improve the training and prediction time of GP models. The key idea is to transform the GP's covariance function in a way that creates a "Kernel Packet" (KP) with desirable mathematical properties.
By combining left and right KPs, the authors show that a compact representation of the GP can be obtained, leading to $\mathcal{O}(\log n)$ or $\mathcal{O}(1)$ time complexity for GP evaluation, where $n$ is the number of data points. This KP approach also enables broader applications of GPs, such as handling derivatives and performing efficient kernel multiplications.
The authors further demonstrate how to generalize the KP concept to multi-dimensional additive and product kernels, which can be useful for modeling complex, scattered data. While the paper presents some limitations and areas for further research, it represents a significant advancement in the field of Gaussian process modeling and could have a substantial impact on the practical applications of this powerful machine learning technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
A General Theory for Kernel Packets: from state space model to compactly supported basis
Liang Ding, Rui Tuo
It is well known that the state space (SS) model formulation of a Gaussian process (GP) can lower its training and prediction time both to $CalO(n)$ for $n$ data points. We prove that an $m$-dimensional SS model formulation of GP is equivalent to a concept we introduce as the general right Kernel Packet (KP): a transformation for the GP covariance $K$ such that $sum_{i=0}^{m}a_iD_t^{(j)}K(t,t_i)=0$ holds for any $t leq t_1$, 0 $leq j leq m-1$, and $m+1$ consecutive points $t_i$, where ${D}_t^{(j)}f(t) $ denotes $j$-th derivative acting on $t$. We extend this idea to the backward SS model formulation, leading to the left KP for next $m$ consecutive points: $sum_{i=0}^{m}b_i{D}_t^{(j)}K(t,t_{m+i})=0$ for any $tgeq t_{2m}$. By combining both left and right KPs, we can prove that a suitable linear combination of these covariance functions yields $m$ KP functions compactly supported on $(t_0,t_{2m})$. KPs improve GP prediction time to $mathcal{O}(log n)$ or $mathcal{O}(1)$, enable broader applications including GP's derivatives and kernel multiplications, and can be generalized to multi-dimensional additive and product kernels for scattered data.
Read more4/11/2024
🏋️
0
Stationary Kernels and Gaussian Processes on Lie Groups and their Homogeneous Spaces II: non-compact symmetric spaces
Iskander Azangulov, Andrei Smolensky, Alexander Terenin, Viacheslav Borovitskiy
Gaussian processes are arguably the most important class of spatiotemporal models within machine learning. They encode prior information about the modeled function and can be used for exact or approximate Bayesian learning. In many applications, particularly in physical sciences and engineering, but also in areas such as geostatistics and neuroscience, invariance to symmetries is one of the most fundamental forms of prior information one can consider. The invariance of a Gaussian process' covariance to such symmetries gives rise to the most natural generalization of the concept of stationarity to such spaces. In this work, we develop constructive and practical techniques for building stationary Gaussian processes on a very large class of non-Euclidean spaces arising in the context of symmetries. Our techniques make it possible to (i) calculate covariance kernels and (ii) sample from prior and posterior Gaussian processes defined on such spaces, both in a practical manner. This work is split into two parts, each involving different technical considerations: part I studies compact spaces, while part II studies non-compact spaces possessing certain structure. Our contributions make the non-Euclidean Gaussian process models we study compatible with well-understood computational techniques available in standard Gaussian process software packages, thereby making them accessible to practitioners.
Read more9/16/2024
0
Markovian Gaussian Process: A Universal State-Space Representation for Stationary Temporal Gaussian Process
Weihan Li, Yule Wang, Chengrui Li, Anqi Wu
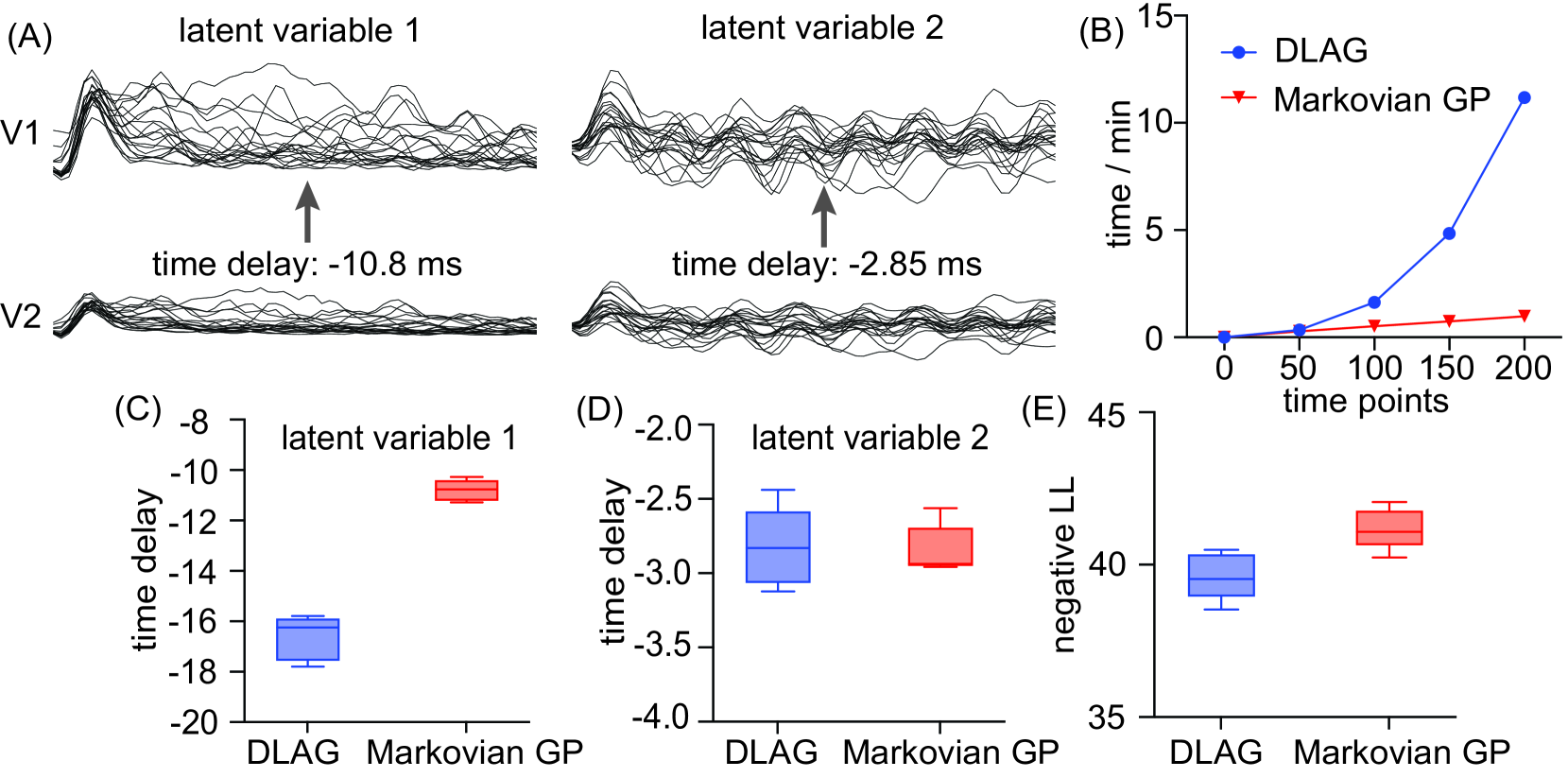
Gaussian Processes (GPs) and Linear Dynamical Systems (LDSs) are essential time series and dynamic system modeling tools. GPs can handle complex, nonlinear dynamics but are computationally demanding, while LDSs offer efficient computation but lack the expressive power of GPs. To combine their benefits, we introduce a universal method that allows an LDS to mirror stationary temporal GPs. This state-space representation, known as the Markovian Gaussian Process (Markovian GP), leverages the flexibility of kernel functions while maintaining efficient linear computation. Unlike existing GP-LDS conversion methods, which require separability for most multi-output kernels, our approach works universally for single- and multi-output stationary temporal kernels. We evaluate our method by computing covariance, performing regression tasks, and applying it to a neuroscience application, demonstrating that our method provides an accurate state-space representation for stationary temporal GPs.
Read more7/2/2024
🌀
0
A New Reliable & Parsimonious Learning Strategy Comprising Two Layers of Gaussian Processes, to Address Inhomogeneous Empirical Correlation Structures
Gargi Roy, Dalia Chakrabarty
We present a new strategy for learning the functional relation between a pair of variables, while addressing inhomogeneities in the correlation structure of the available data, by modelling the sought function as a sample function of a non-stationary Gaussian Process (GP), that nests within itself multiple other GPs, each of which we prove can be stationary, thereby establishing sufficiency of two GP layers. In fact, a non-stationary kernel is envisaged, with each hyperparameter set as dependent on the sample function drawn from the outer non-stationary GP, such that a new sample function is drawn at every pair of input values at which the kernel is computed. However, such a model cannot be implemented, and we substitute this by recalling that the average effect of drawing different sample functions from a given GP is equivalent to that of drawing a sample function from each of a set of GPs that are rendered different, as updated during the equilibrium stage of the undertaken inference (via MCMC). The kernel is fully non-parametric, and it suffices to learn one hyperparameter per layer of GP, for each dimension of the input variable. We illustrate this new learning strategy on a real dataset.
Read more4/22/2024