A Generalizable Physics-informed Learning Framework for Risk Probability Estimation

0
🎲
Sign in to get full access
Overview
- Accurate estimates of long-term risk probabilities and their gradients are critical for stochastic safe control methods.
- Computing these risk probabilities in real-time and in unseen or changing environments is challenging.
- Monte Carlo (MC) methods cannot accurately evaluate the probabilities and their gradients due to sampling noise amplification.
Plain English Explanation
Knowing the chances of long-term risks and how those chances change is very important for certain control systems that need to operate safely in unpredictable situations. However, calculating these risk probabilities quickly and in new or changing environments is difficult. Monte Carlo methods, which use random sampling to estimate probabilities, can't accurately evaluate the probabilities and their gradients (how they change) because small errors in the sampling can get magnified.
Technical Explanation
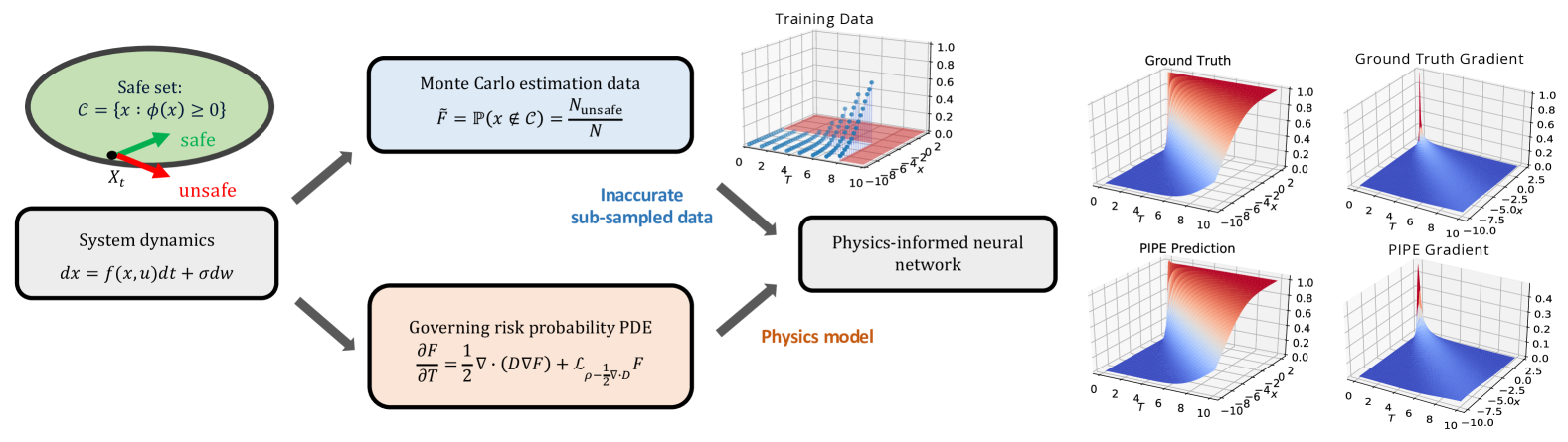
The paper proposes an efficient method to evaluate long-term risk probabilities and their gradients. The method combines Monte Carlo (MC) methods with physics-informed neural networks to exploit the fact that long-term risk probabilities satisfy certain partial differential equations (PDEs). This allows the method to better integrate the sampling of MC with the mathematical structure of the problem.
The paper provides theoretical guarantees on the estimation error based on the training configuration choices. Numerical results show the proposed method has better sample efficiency, generalizes well to new situations, and can adapt to systems with changing parameters. The method can also accurately estimate the gradients of the risk probabilities, enabling advanced optimization techniques on these probabilities for learning and control.
Critical Analysis
The paper acknowledges that the proposed method still has some limitations, such as the need to choose appropriate training configurations to achieve the theoretical guarantees. Additionally, the method may struggle with highly complex systems or environments that deviate significantly from the assumptions built into the PDE formulation.
Further research could explore ways to make the method more robust to a wider range of system dynamics and environmental conditions. Combining this approach with other techniques, such as robust learning or probabilistic certificates, could also enhance its applicability and performance.
Conclusion
This paper presents an innovative approach to efficiently estimating long-term risk probabilities and their gradients, which are crucial for advanced stochastic control systems. By integrating Monte Carlo sampling with physics-informed neural networks, the method can provide accurate real-time risk assessments even in unseen or changing environments. While the technique has some limitations, it represents an important step forward in enabling safer and more reliable autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎲
0
A Generalizable Physics-informed Learning Framework for Risk Probability Estimation
Zhuoyuan Wang, Yorie Nakahira
Accurate estimates of long-term risk probabilities and their gradients are critical for many stochastic safe control methods. However, computing such risk probabilities in real-time and in unseen or changing environments is challenging. Monte Carlo (MC) methods cannot accurately evaluate the probabilities and their gradients as an infinitesimal devisor can amplify the sampling noise. In this paper, we develop an efficient method to evaluate the probabilities of long-term risk and their gradients. The proposed method exploits the fact that long-term risk probability satisfies certain partial differential equations (PDEs), which characterize the neighboring relations between the probabilities, to integrate MC methods and physics-informed neural networks. We provide theoretical guarantees of the estimation error given certain choices of training configurations. Numerical results show the proposed method has better sample efficiency, generalizes well to unseen regions, and can adapt to systems with changing parameters. The proposed method can also accurately estimate the gradients of risk probabilities, which enables first- and second-order techniques on risk probabilities to be used for learning and control.
Read more8/20/2024
0
Generalizable Physics-informed Learning for Stochastic Safety-critical Systems
Zhuoyuan Wang, Albert Chern, Yorie Nakahira
Accurate estimate of long-term risk is critical for safe decision-making, but sampling from rare risk events and long-term trajectories can be prohibitively costly. Risk gradient can be used in many first-order techniques for learning and control methods, but gradient estimate is difficult to obtain using Monte Carlo (MC) methods because the infinitesimal divisor may significantly amplify sampling noise. Motivated by this gap, we propose an efficient method to evaluate long-term risk probabilities and their gradients using short-term samples without sufficient risk events. We first derive that four types of long-term risk probability are solutions of certain partial differential equations (PDEs). Then, we propose a physics-informed learning technique that integrates data and physics information (aforementioned PDEs). The physics information helps propagate information beyond available data and obtain provable generalization beyond available data, which in turn enables long-term risk to be estimated using short-term samples of safe events. Finally, we demonstrate in simulation that the proposed technique has improved sample efficiency, generalizes well to unseen regions, and adapts to changing system parameters.
Read more8/20/2024
0
Myopically Verifiable Probabilistic Certificates for Safe Control and Learning
Zhuoyuan Wang, Haoming Jing, Christian Kurniawan, Albert Chern, Yorie Nakahira
This paper addresses the design of safety certificates for stochastic systems, with a focus on ensuring long-term safety through fast real-time control. In stochastic environments, set invariance-based methods that restrict the probability of risk events in infinitesimal time intervals may exhibit significant long-term risks due to cumulative uncertainties/risks. On the other hand, reachability-based approaches that account for the long-term future may require prohibitive computation in real-time decision making. To overcome this challenge involving stringent long-term safety vs. computation tradeoffs, we first introduce a novel technique termed `probabilistic invariance'. This technique characterizes the invariance conditions of the probability of interest. When the target probability is defined using long-term trajectories, this technique can be used to design myopic conditions/controllers with assured long-term safe probability. Then, we integrate this technique into safe control and learning. The proposed control methods efficiently assure long-term safety using neural networks or model predictive controllers with short outlook horizons. The proposed learning methods can be used to guarantee long-term safety during and after training. Finally, we demonstrate the performance of the proposed techniques in numerical simulations.
Read more4/29/2024
0
Physics-informed machine learning as a kernel method
Nathan Doum`eche (LPSM), Francis Bach (DI-ENS, SIERRA), G'erard Biau (LPSM), Claire Boyer (IUF, LPSM)
Physics-informed machine learning combines the expressiveness of data-based approaches with the interpretability of physical models. In this context, we consider a general regression problem where the empirical risk is regularized by a partial differential equation that quantifies the physical inconsistency. We prove that for linear differential priors, the problem can be formulated as a kernel regression task. Taking advantage of kernel theory, we derive convergence rates for the minimizer of the regularized risk and show that it converges at least at the Sobolev minimax rate. However, faster rates can be achieved, depending on the physical error. This principle is illustrated with a one-dimensional example, supporting the claim that regularizing the empirical risk with physical information can be beneficial to the statistical performance of estimators.
Read more6/21/2024