Myopically Verifiable Probabilistic Certificates for Safe Control and Learning

0
Sign in to get full access
Overview
- This research paper proposes a method for generating probabilistic certificates that can verify the safety of control and learning systems, even in the presence of uncertainty.
- The key idea is to provide "myopically verifiable" certificates, which can be checked efficiently without requiring complex global optimization.
- The proposed approach is applicable to a wide range of stochastic systems, including those with nonlinear dynamics and unknown parameters.
Plain English Explanation
The paper introduces a new technique for verifying the safety of control and learning systems, even when there is uncertainty in the system's behavior. Safety is a critical concern for many intelligent systems, like self-driving cars or robots, as we want to ensure they operate within safe boundaries.
The key innovation is the concept of "myopically verifiable probabilistic certificates." These certificates can be efficiently checked without requiring complex global optimization, which is often computationally expensive. Instead, they focus on the system's local, short-term behavior, making the verification process much simpler and faster.
The approach is designed to work with a wide range of stochastic systems, including those with nonlinear dynamics and unknown parameters. This flexibility is important, as real-world systems often exhibit complex, unpredictable behavior.
Technical Explanation
The paper presents a framework for generating probabilistic certificates that can verify the safety of control and learning systems. These certificates provide probabilistic guarantees on the system's behavior, even in the presence of uncertainty.
The core idea is to construct "myopically verifiable" certificates, which can be efficiently checked without requiring complex global optimization. This is achieved by focusing on the system's local, short-term behavior, rather than trying to analyze its long-term, global dynamics.
The authors develop a suite of theoretical tools to enable the construction of these myopically verifiable certificates. This includes techniques for bounding the system's evolution and quantifying the impact of uncertainty. The resulting certificates can be used to verify the safety of control and learning systems, even in the face of complex, nonlinear dynamics and unknown parameters.
Critical Analysis
The paper presents a promising approach for ensuring the safety of control and learning systems, even in the presence of uncertainty. The key advantage of the myopically verifiable certificates is their computational efficiency, which allows for practical application in real-world scenarios.
However, the paper does not extensively discuss the potential limitations of the proposed method. For example, it is unclear how the approach would scale to larger, more complex systems, or how it would handle situations with more severe or long-term uncertainties. Further research and empirical validation may be needed to fully assess the method's capabilities and limitations.
Additionally, the paper does not provide a comparative analysis with other safety verification techniques. It would be helpful to understand how the myopically verifiable certificates perform relative to other approaches, in terms of accuracy, computation time, and applicability to different problem domains.
Conclusion
This research paper presents a novel approach for generating probabilistic certificates that can efficiently verify the safety of control and learning systems, even in the presence of uncertainty. The key innovation is the concept of "myopically verifiable" certificates, which focus on the system's local, short-term behavior, making the verification process computationally tractable.
The proposed method has the potential to significantly improve the safety and reliability of intelligent systems, such as autonomous vehicles and robotic platforms, by providing a practical way to ensure their operations remain within safe boundaries. Further research and validation will be needed to fully understand the method's capabilities and limitations, but this work represents an important step forward in the field of safe control and learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Myopically Verifiable Probabilistic Certificates for Safe Control and Learning
Zhuoyuan Wang, Haoming Jing, Christian Kurniawan, Albert Chern, Yorie Nakahira
This paper addresses the design of safety certificates for stochastic systems, with a focus on ensuring long-term safety through fast real-time control. In stochastic environments, set invariance-based methods that restrict the probability of risk events in infinitesimal time intervals may exhibit significant long-term risks due to cumulative uncertainties/risks. On the other hand, reachability-based approaches that account for the long-term future may require prohibitive computation in real-time decision making. To overcome this challenge involving stringent long-term safety vs. computation tradeoffs, we first introduce a novel technique termed `probabilistic invariance'. This technique characterizes the invariance conditions of the probability of interest. When the target probability is defined using long-term trajectories, this technique can be used to design myopic conditions/controllers with assured long-term safe probability. Then, we integrate this technique into safe control and learning. The proposed control methods efficiently assure long-term safety using neural networks or model predictive controllers with short outlook horizons. The proposed learning methods can be used to guarantee long-term safety during and after training. Finally, we demonstrate the performance of the proposed techniques in numerical simulations.
Read more4/29/2024
0
Generalizable Physics-informed Learning for Stochastic Safety-critical Systems
Zhuoyuan Wang, Albert Chern, Yorie Nakahira
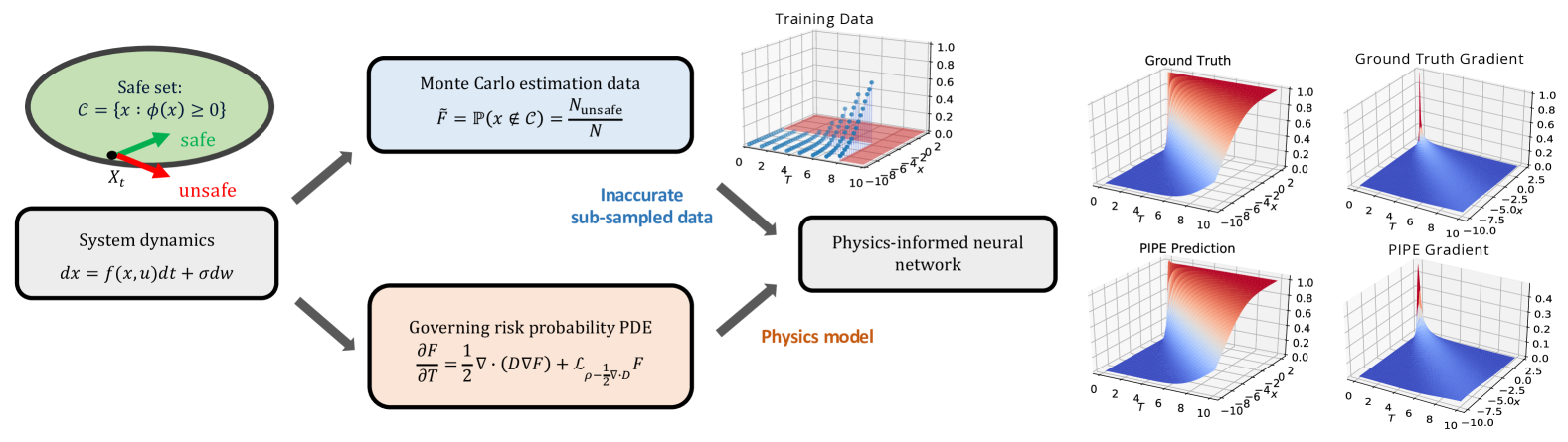
Accurate estimate of long-term risk is critical for safe decision-making, but sampling from rare risk events and long-term trajectories can be prohibitively costly. Risk gradient can be used in many first-order techniques for learning and control methods, but gradient estimate is difficult to obtain using Monte Carlo (MC) methods because the infinitesimal divisor may significantly amplify sampling noise. Motivated by this gap, we propose an efficient method to evaluate long-term risk probabilities and their gradients using short-term samples without sufficient risk events. We first derive that four types of long-term risk probability are solutions of certain partial differential equations (PDEs). Then, we propose a physics-informed learning technique that integrates data and physics information (aforementioned PDEs). The physics information helps propagate information beyond available data and obtain provable generalization beyond available data, which in turn enables long-term risk to be estimated using short-term samples of safe events. Finally, we demonstrate in simulation that the proposed technique has improved sample efficiency, generalizes well to unseen regions, and adapts to changing system parameters.
Read more8/20/2024
🏅
0
Verified Safe Reinforcement Learning for Neural Network Dynamic Models
Junlin Wu, Huan Zhang, Yevgeniy Vorobeychik
Learning reliably safe autonomous control is one of the core problems in trustworthy autonomy. However, training a controller that can be formally verified to be safe remains a major challenge. We introduce a novel approach for learning verified safe control policies in nonlinear neural dynamical systems while maximizing overall performance. Our approach aims to achieve safety in the sense of finite-horizon reachability proofs, and is comprised of three key parts. The first is a novel curriculum learning scheme that iteratively increases the verified safe horizon. The second leverages the iterative nature of gradient-based learning to leverage incremental verification, reusing information from prior verification runs. Finally, we learn multiple verified initial-state-dependent controllers, an idea that is especially valuable for more complex domains where learning a single universal verified safe controller is extremely challenging. Our experiments on five safe control problems demonstrate that our trained controllers can achieve verified safety over horizons that are as much as an order of magnitude longer than state-of-the-art baselines, while maintaining high reward, as well as a perfect safety record over entire episodes.
Read more5/28/2024

0
Distributionally Robust Policy and Lyapunov-Certificate Learning
Kehan Long, Jorge Cortes, Nikolay Atanasov
This article presents novel methods for synthesizing distributionally robust stabilizing neural controllers and certificates for control systems under model uncertainty. A key challenge in designing controllers with stability guarantees for uncertain systems is the accurate determination of and adaptation to shifts in model parametric uncertainty during online deployment. We tackle this with a novel distributionally robust formulation of the Lyapunov derivative chance constraint ensuring a monotonic decrease of the Lyapunov certificate. To avoid the computational complexity involved in dealing with the space of probability measures, we identify a sufficient condition in the form of deterministic convex constraints that ensures the Lyapunov derivative constraint is satisfied. We integrate this condition into a loss function for training a neural network-based controller and show that, for the resulting closed-loop system, the global asymptotic stability of its equilibrium can be certified with high confidence, even with Out-of-Distribution (OoD) model uncertainties. To demonstrate the efficacy and efficiency of the proposed methodology, we compare it with an uncertainty-agnostic baseline approach and several reinforcement learning approaches in two control problems in simulation.
Read more8/6/2024