Generalizable Physics-informed Learning for Stochastic Safety-critical Systems

0
Sign in to get full access
Overview
- Presents a framework for generalizable physics-informed learning to ensure safety in stochastic, safety-critical systems
- Combines physics-based modeling, uncertainty quantification, and data-driven learning to enable safe and reliable system operation
- Focuses on applications in areas like autonomous vehicles, robotics, and energy systems where safety is paramount
Plain English Explanation
This research paper introduces a new approach for making machine learning systems that control safety-critical devices, like self-driving cars or industrial robots, more reliable and trustworthy. The key idea is to incorporate physical laws and principles into the machine learning models, rather than relying solely on data-driven techniques.
By combining physics-based modeling, uncertainty quantification, and data-driven learning, the researchers develop a framework that can better handle the inherent stochasticity and uncertainty present in real-world safety-critical systems. This allows the machine learning models to make more robust and reliable decisions, reducing the risk of accidents or failures.
The researchers demonstrate the effectiveness of their approach on several case studies, including applications in autonomous vehicles, robotics, and energy systems. These are all domains where safety is of the utmost importance, so having machine learning systems that can account for physical constraints and uncertainties is crucial.
Technical Explanation
The paper proposes a generalized physics-informed learning framework for ensuring safety in stochastic, safety-critical systems. The key components of the framework include:
- Physics-based modeling: Developing mathematical models that capture the relevant physical laws and principles governing the system behavior.
- Uncertainty quantification: Rigorously characterizing the various sources of uncertainty, such as model parameters, initial conditions, and external disturbances.
- Data-driven learning: Leveraging machine learning techniques to extract valuable information from available data and improve the predictive capabilities of the physics-based models.
By integrating these elements, the researchers develop a myopically verifiable probabilistic certificate that can provide safety guarantees for the system's operation, even in the presence of stochasticity and uncertainty.
The framework is evaluated on several case studies, including an autonomous vehicle navigation problem, a robotic manipulator task, and a power grid scenario. The results demonstrate the ability of the proposed approach to learn safely and efficiently while maintaining the necessary safety margins, outperforming traditional data-driven methods.
Critical Analysis
The paper presents a comprehensive and well-designed framework for ensuring safety in stochastic, safety-critical systems. The integration of physics-based modeling, uncertainty quantification, and data-driven learning is a promising approach that can potentially address many of the challenges associated with the safe deployment of autonomous systems.
One potential limitation of the framework is its reliance on the availability of accurate physical models and the ability to characterize all relevant sources of uncertainty. In practice, this may be difficult to achieve, especially for complex systems with multiple interacting components. Additionally, the computational overhead associated with the uncertainty quantification and optimization steps may limit the real-time applicability of the approach in some scenarios.
Further research is needed to explore ways to reduce the computational burden and investigate the robustness of the framework against model misspecification or incomplete knowledge of the underlying physics.
Conclusion
The proposed generalized physics-informed learning framework represents a significant advancement in the field of safe and reliable control of stochastic, safety-critical systems. By seamlessly integrating physical principles, uncertainty quantification, and data-driven techniques, the approach can enable the development of machine learning models that are capable of making safe and trustworthy decisions, even in the face of complex, real-world uncertainties.
The successful applications of the framework in autonomous vehicles, robotics, and energy systems demonstrate its broad applicability and potential impact on industries where safety is of paramount importance. As the field of AI continues to advance, frameworks like the one presented in this paper will play a crucial role in ensuring the safe and responsible deployment of these technologies, benefiting both individuals and society as a whole.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generalizable Physics-informed Learning for Stochastic Safety-critical Systems
Zhuoyuan Wang, Albert Chern, Yorie Nakahira
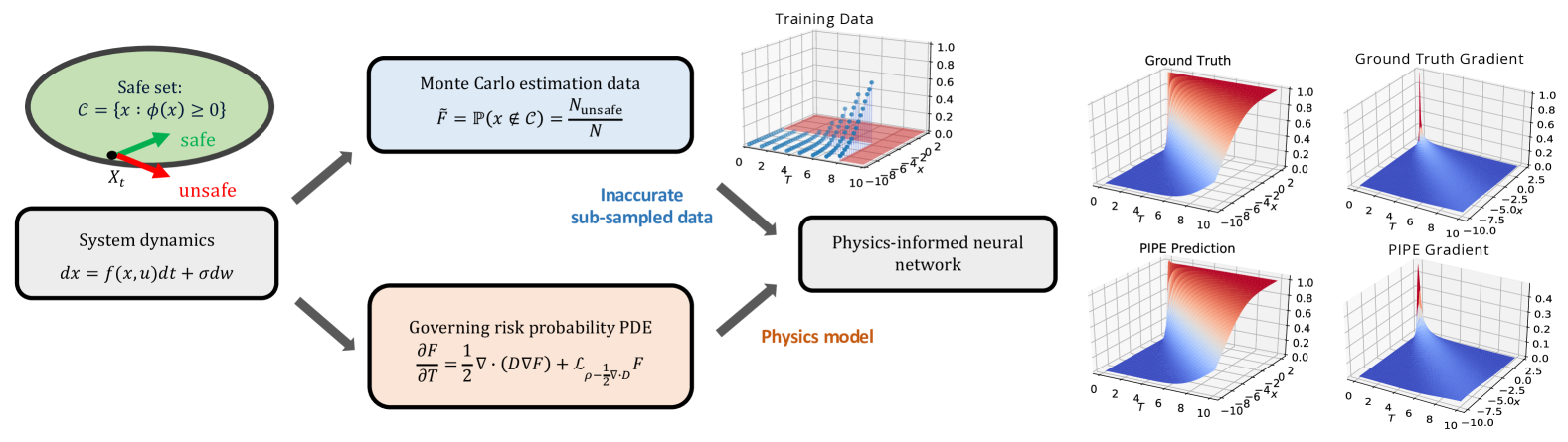
Accurate estimate of long-term risk is critical for safe decision-making, but sampling from rare risk events and long-term trajectories can be prohibitively costly. Risk gradient can be used in many first-order techniques for learning and control methods, but gradient estimate is difficult to obtain using Monte Carlo (MC) methods because the infinitesimal divisor may significantly amplify sampling noise. Motivated by this gap, we propose an efficient method to evaluate long-term risk probabilities and their gradients using short-term samples without sufficient risk events. We first derive that four types of long-term risk probability are solutions of certain partial differential equations (PDEs). Then, we propose a physics-informed learning technique that integrates data and physics information (aforementioned PDEs). The physics information helps propagate information beyond available data and obtain provable generalization beyond available data, which in turn enables long-term risk to be estimated using short-term samples of safe events. Finally, we demonstrate in simulation that the proposed technique has improved sample efficiency, generalizes well to unseen regions, and adapts to changing system parameters.
Read more8/20/2024
🎲
0
A Generalizable Physics-informed Learning Framework for Risk Probability Estimation
Zhuoyuan Wang, Yorie Nakahira
Accurate estimates of long-term risk probabilities and their gradients are critical for many stochastic safe control methods. However, computing such risk probabilities in real-time and in unseen or changing environments is challenging. Monte Carlo (MC) methods cannot accurately evaluate the probabilities and their gradients as an infinitesimal devisor can amplify the sampling noise. In this paper, we develop an efficient method to evaluate the probabilities of long-term risk and their gradients. The proposed method exploits the fact that long-term risk probability satisfies certain partial differential equations (PDEs), which characterize the neighboring relations between the probabilities, to integrate MC methods and physics-informed neural networks. We provide theoretical guarantees of the estimation error given certain choices of training configurations. Numerical results show the proposed method has better sample efficiency, generalizes well to unseen regions, and can adapt to systems with changing parameters. The proposed method can also accurately estimate the gradients of risk probabilities, which enables first- and second-order techniques on risk probabilities to be used for learning and control.
Read more8/20/2024
0
Myopically Verifiable Probabilistic Certificates for Safe Control and Learning
Zhuoyuan Wang, Haoming Jing, Christian Kurniawan, Albert Chern, Yorie Nakahira
This paper addresses the design of safety certificates for stochastic systems, with a focus on ensuring long-term safety through fast real-time control. In stochastic environments, set invariance-based methods that restrict the probability of risk events in infinitesimal time intervals may exhibit significant long-term risks due to cumulative uncertainties/risks. On the other hand, reachability-based approaches that account for the long-term future may require prohibitive computation in real-time decision making. To overcome this challenge involving stringent long-term safety vs. computation tradeoffs, we first introduce a novel technique termed `probabilistic invariance'. This technique characterizes the invariance conditions of the probability of interest. When the target probability is defined using long-term trajectories, this technique can be used to design myopic conditions/controllers with assured long-term safe probability. Then, we integrate this technique into safe control and learning. The proposed control methods efficiently assure long-term safety using neural networks or model predictive controllers with short outlook horizons. The proposed learning methods can be used to guarantee long-term safety during and after training. Finally, we demonstrate the performance of the proposed techniques in numerical simulations.
Read more4/29/2024
0
Physics-informed machine learning as a kernel method
Nathan Doum`eche (LPSM), Francis Bach (DI-ENS, SIERRA), G'erard Biau (LPSM), Claire Boyer (IUF, LPSM)
Physics-informed machine learning combines the expressiveness of data-based approaches with the interpretability of physical models. In this context, we consider a general regression problem where the empirical risk is regularized by a partial differential equation that quantifies the physical inconsistency. We prove that for linear differential priors, the problem can be formulated as a kernel regression task. Taking advantage of kernel theory, we derive convergence rates for the minimizer of the regularized risk and show that it converges at least at the Sobolev minimax rate. However, faster rates can be achieved, depending on the physical error. This principle is illustrated with a one-dimensional example, supporting the claim that regularizing the empirical risk with physical information can be beneficial to the statistical performance of estimators.
Read more6/21/2024