Generation of Training Data from HD Maps in the Lanelet2 Framework

0

Sign in to get full access
Overview
- The paper discusses a method for generating training data for autonomous driving systems using high-definition (HD) maps and the Lanelet2 framework.
- The researchers outline the requirements for modern HD map frameworks and how their approach addresses these needs.
- They describe the technical details of their data generation process and provide a critical analysis of the potential limitations and areas for further research.
Plain English Explanation
The researchers in this paper have developed a way to create training data for self-driving car systems using detailed digital maps called HD maps. These maps contain a lot of information about the roads, lanes, and other features that a self-driving car needs to navigate.
The paper outlines the key requirements for modern HD map frameworks, like being able to handle complex road networks and support various data formats. The researchers show how their approach, built on the Lanelet2 framework, meets these needs.
Their data generation process involves extracting information from the HD maps and converting it into a format that can be used to train machine learning models for self-driving cars. This allows them to create large, diverse datasets without having to manually collect and label real-world driving data, which can be time-consuming and expensive.
Technical Explanation
The paper describes the Lanelet2 framework, which is used to represent and process the HD map data. Lanelet2 provides a flexible and extensible data model that can handle complex road networks and support various data formats, making it well-suited for the researchers' needs.
The data generation process involves extracting relevant information from the HD maps, such as lane boundaries, traffic signs, and parking spaces. This data is then converted into a format that can be used to train machine learning models for tasks like lane detection, traffic sign recognition, and object detection.
The researchers also discuss the potential limitations of their approach, such as the need to ensure the accuracy and completeness of the HD map data, and areas for further research, like exploring ways to incorporate more dynamic information into the generated datasets.
Critical Analysis
The researchers have presented a promising approach for generating training data for autonomous driving systems using HD maps and the Lanelet2 framework. Their method addresses several key requirements for modern HD map frameworks and provides a scalable way to create large, diverse datasets without the need for extensive real-world data collection.
However, the paper does acknowledge some potential limitations, such as the need to ensure the accuracy and completeness of the HD map data used. There may also be concerns about the generalizability of the generated datasets, as they are ultimately derived from the specific maps and data sources used.
Additionally, the researchers could have explored ways to incorporate more dynamic information, such as real-time traffic and weather conditions, into the generated datasets to better reflect the complex and ever-changing nature of the driving environment.
Overall, the researchers' work represents a valuable contribution to the field of autonomous driving, and the methods and insights presented in the paper could be useful for researchers and practitioners working on similar challenges.
Conclusion
This paper presents a novel approach for generating training data for autonomous driving systems using high-definition (HD) maps and the Lanelet2 framework. The researchers have addressed several key requirements for modern HD map frameworks and developed a scalable process for extracting and converting map data into a format that can be used to train machine learning models.
The potential of this work lies in its ability to create large, diverse datasets without the need for extensive real-world data collection, which can be time-consuming and expensive. This could significantly accelerate the development and deployment of autonomous driving technologies, ultimately leading to safer and more efficient transportation systems.
While the paper acknowledges some limitations and areas for further research, the researchers' work represents an important step forward in the field of autonomous driving. By leveraging the power of HD maps and advanced data processing techniques, the researchers have demonstrated a promising approach for generating high-quality training data that can help drive the next generation of self-driving car systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generation of Training Data from HD Maps in the Lanelet2 Framework
Fabian Immel, Richard Fehler, Frank Bieder, Christoph Stiller
Using HD maps directly as training data for machine learning tasks has seen a massive surge in popularity and shown promising results, e.g. in the field of map perception. Despite that, a standardized HD map framework supporting all parts of map-based automated driving and training label generation from map data does not exist. Furthermore, feeding map perception models with map data as part of the input during real-time inference is not addressed by the research community. In order to fill this gap, we presentlanelet2_ml_converter, an integrated extension to the HD map framework Lanelet2, widely used in automated driving systems by academia and industry. With this addition Lanelet2 unifies map based automated driving, machine learning inference and training, all from a single source of map data and format. Requirements for a unified framework are analyzed and the implementation of these requirements is described. The usability of labels in state of the art machine learning is demonstrated with application examples from the field of map perception. The source code is available embedded in the Lanelet2 framework under https://github.com/fzi-forschungszentrum-informatik/Lanelet2/tree/feature_ml_converter
Read more7/25/2024

0
New!DeepAerialMapper: Deep Learning-based Semi-automatic HD Map Creation for Highly Automated Vehicles
Robert Krajewski, Huijo Kim
High-definition maps (HD maps) play a crucial role in the development, safety validation, and operation of highly automated vehicles. Efficiently collecting up-to-date sensor data from road segments and obtaining accurate maps from these are key challenges in HD map creation. Commonly used methods, such as dedicated measurement vehicles and crowd-sourced data from series vehicles, often face limitations in commercial viability. Although high-resolution aerial imagery offers a cost-effective or even free alternative, it requires significant manual effort and time to transform it into maps. In this paper, we introduce a semi-automatic method for creating HD maps from high-resolution aerial imagery. Our method involves training neural networks to semantically segment aerial images into classes relevant to HD maps. The resulting segmentation is then hierarchically post-processed to generate a prototypical HD map of visible road elements. Exporting the map to the Lanelet2 format allows easy extension for different use cases using standard tools. To train and evaluate our method, we created a dataset using public aerial imagery of urban road segments in Germany. In our evaluation, we achieved an automatic mapping of lane markings and road borders with a recall and precision exceeding 96%. The source code for our method is publicly available at https://github.com/RobertKrajewski/DeepAerialMapper.
Read more10/2/2024
0
HD Maps are Lane Detection Generalizers: A Novel Generative Framework for Single-Source Domain Generalization
Daeun Lee, Minhyeok Heo, Jiwon Kim
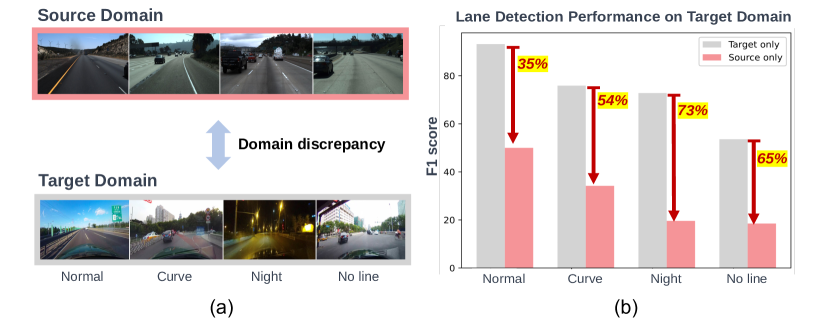
Lane detection is a vital task for vehicles to navigate and localize their position on the road. To ensure reliable driving, lane detection models must have robust generalization performance in various road environments. However, despite the advanced performance in the trained domain, their generalization performance still falls short of expectations due to the domain discrepancy. To bridge this gap, we propose a novel generative framework using HD Maps for Single-Source Domain Generalization (SSDG) in lane detection. We first generate numerous front-view images from lane markings of HD Maps. Next, we strategically select a core subset among the generated images using (i) lane structure and (ii) road surrounding criteria to maximize their diversity. In the end, utilizing this core set, we train lane detection models to boost their generalization performance. We validate that our generative framework from HD Maps outperforms the Domain Adaptation model MLDA with +3.01%p accuracy improvement, even though we do not access the target domain images.
Read more6/4/2024

0
LMT-Net: Lane Model Transformer Network for Automated HD Mapping from Sparse Vehicle Observations
Michael Mink, Thomas Monninger, Steffen Staab
In autonomous driving, High Definition (HD) maps provide a complete lane model that is not limited by sensor range and occlusions. However, the generation and upkeep of HD maps involves periodic data collection and human annotations, limiting scalability. To address this, we investigate automating the lane model generation and the use of sparse vehicle observations instead of dense sensor measurements. For our approach, a pre-processing step generates polylines by aligning and aggregating observed lane boundaries. Aligned driven traces are used as starting points for predicting lane pairs defined by the left and right boundary points. We propose Lane Model Transformer Network (LMT-Net), an encoder-decoder neural network architecture that performs polyline encoding and predicts lane pairs and their connectivity. A lane graph is formed by using predicted lane pairs as nodes and predicted lane connectivity as edges. We evaluate the performance of LMT-Net on an internal dataset that consists of multiple vehicle observations as well as human annotations as Ground Truth (GT). The evaluation shows promising results and demonstrates superior performance compared to the implemented baseline on both highway and non-highway Operational Design Domain (ODD).
Read more9/20/2024