HD Maps are Lane Detection Generalizers: A Novel Generative Framework for Single-Source Domain Generalization

0
Sign in to get full access
Overview
- This paper proposes a novel framework to improve the generalization of lane detection models by leveraging high-definition (HD) maps.
- The key idea is to use HD maps to generate diverse synthetic lane data, which can then be used to train more robust and generalized lane detection models.
- The authors demonstrate the effectiveness of their approach through extensive experiments on various datasets, showing significant improvements over existing methods.
Plain English Explanation
Autonomous vehicles rely on accurate lane detection to navigate safely on the roads. However, training lane detection models can be challenging, as they need to work well in a wide variety of environments and conditions. The paper introduces a new approach to address this problem.
The main insight is to use high-definition (HD) maps, which provide detailed information about the road layout, to generate synthetic data for training lane detection models. By using HD maps, the researchers can create a much more diverse set of training examples, covering different road types, lighting conditions, and other factors. This helps the models learn to generalize better and perform well in a wider range of real-world scenarios.
The authors show that their framework, which they call "DGINSTYLE", significantly improves the performance of lane detection models compared to existing methods. This is an important step towards making autonomous vehicles more reliable and robust, as accurate lane detection is a critical component for safe navigation.
Technical Explanation
The paper proposes a novel framework, called "DGINSTYLE", to improve the generalization of lane detection models. The key idea is to leverage high-definition (HD) maps to generate diverse synthetic training data, which can then be used to train more robust and generalized lane detection models.
The framework consists of two main components:
-
HD Map-based Data Augmentation: The authors use the detailed information provided by HD maps, such as the road layout, lane geometry, and traffic rules, to generate a wide variety of synthetic lane data. This includes variations in lighting conditions, weather, camera viewpoints, and other factors that can affect lane detection performance.
-
Domain-Generalized Lane Detection: The authors then train the lane detection model using the augmented dataset, along with techniques to improve its ability to generalize across different domains, such as domain-adversarial training and language-guided adaptation.
The authors evaluate their framework on several challenging lane detection datasets, including SGV3D and GAD, and demonstrate significant improvements in performance compared to existing methods.
Critical Analysis
The paper presents a promising approach to improve the generalization of lane detection models, but it also has some limitations and potential areas for further research:
-
Dependency on HD Maps: The framework relies on the availability of high-quality HD maps, which may not be readily available in all regions or may have inaccuracies. This could limit the applicability of the approach in some real-world scenarios.
-
Scalability and Efficiency: The process of generating diverse synthetic data using HD maps may be computationally intensive and time-consuming. The authors should investigate ways to make the data generation more efficient and scalable.
-
Validation in Real-World Deployments: While the experiments show improvements on various datasets, the true test would be to evaluate the framework's performance in real-world autonomous vehicle deployments, which may involve additional challenges not captured in the datasets.
-
Potential Biases in Synthetic Data: The authors should also consider the potential biases that may be introduced in the synthetic data generated from HD maps, and how this could affect the model's performance in diverse real-world scenarios.
Despite these limitations, the paper presents a novel and promising approach to improving the generalization of lane detection models, which is a crucial component for the safe deployment of autonomous vehicles. The authors' use of HD maps to boost data diversity and their domain-generalization techniques are valuable contributions to the field.
Conclusion
This paper introduces a novel framework, called "DGINSTYLE", that leverages high-definition (HD) maps to improve the generalization of lane detection models. By using HD maps to generate diverse synthetic training data, the authors demonstrate significant performance improvements over existing methods on various lane detection datasets.
The proposed approach is an important step towards making autonomous vehicles more reliable and robust, as accurate lane detection is a critical component for safe navigation. While the framework has some limitations, such as its dependency on HD maps and the potential for biases in the synthetic data, the authors' work represents a valuable contribution to the field of autonomous driving and computer vision.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HD Maps are Lane Detection Generalizers: A Novel Generative Framework for Single-Source Domain Generalization
Daeun Lee, Minhyeok Heo, Jiwon Kim
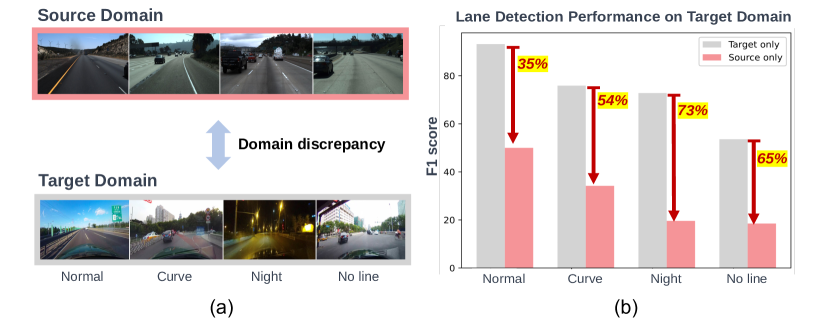
Lane detection is a vital task for vehicles to navigate and localize their position on the road. To ensure reliable driving, lane detection models must have robust generalization performance in various road environments. However, despite the advanced performance in the trained domain, their generalization performance still falls short of expectations due to the domain discrepancy. To bridge this gap, we propose a novel generative framework using HD Maps for Single-Source Domain Generalization (SSDG) in lane detection. We first generate numerous front-view images from lane markings of HD Maps. Next, we strategically select a core subset among the generated images using (i) lane structure and (ii) road surrounding criteria to maximize their diversity. In the end, utilizing this core set, we train lane detection models to boost their generalization performance. We validate that our generative framework from HD Maps outperforms the Domain Adaptation model MLDA with +3.01%p accuracy improvement, even though we do not access the target domain images.
Read more6/4/2024

0
Generation of Training Data from HD Maps in the Lanelet2 Framework
Fabian Immel, Richard Fehler, Frank Bieder, Christoph Stiller
Using HD maps directly as training data for machine learning tasks has seen a massive surge in popularity and shown promising results, e.g. in the field of map perception. Despite that, a standardized HD map framework supporting all parts of map-based automated driving and training label generation from map data does not exist. Furthermore, feeding map perception models with map data as part of the input during real-time inference is not addressed by the research community. In order to fill this gap, we presentlanelet2_ml_converter, an integrated extension to the HD map framework Lanelet2, widely used in automated driving systems by academia and industry. With this addition Lanelet2 unifies map based automated driving, machine learning inference and training, all from a single source of map data and format. Requirements for a unified framework are analyzed and the implementation of these requirements is described. The usability of labels in state of the art machine learning is demonstrated with application examples from the field of map perception. The source code is available embedded in the Lanelet2 framework under https://github.com/fzi-forschungszentrum-informatik/Lanelet2/tree/feature_ml_converter
Read more7/25/2024

0
LMT-Net: Lane Model Transformer Network for Automated HD Mapping from Sparse Vehicle Observations
Michael Mink, Thomas Monninger, Steffen Staab
In autonomous driving, High Definition (HD) maps provide a complete lane model that is not limited by sensor range and occlusions. However, the generation and upkeep of HD maps involves periodic data collection and human annotations, limiting scalability. To address this, we investigate automating the lane model generation and the use of sparse vehicle observations instead of dense sensor measurements. For our approach, a pre-processing step generates polylines by aligning and aggregating observed lane boundaries. Aligned driven traces are used as starting points for predicting lane pairs defined by the left and right boundary points. We propose Lane Model Transformer Network (LMT-Net), an encoder-decoder neural network architecture that performs polyline encoding and predicts lane pairs and their connectivity. A lane graph is formed by using predicted lane pairs as nodes and predicted lane connectivity as edges. We evaluate the performance of LMT-Net on an internal dataset that consists of multiple vehicle observations as well as human annotations as Ground Truth (GT). The evaluation shows promising results and demonstrates superior performance compared to the implemented baseline on both highway and non-highway Operational Design Domain (ODD).
Read more9/20/2024

0
Neural HD Map Generation from Multiple Vectorized Tiles Locally Produced by Autonomous Vehicles
Miao Fan, Yi Yao, Jianping Zhang, Xiangbo Song, Daihui Wu
High-definition (HD) map is a fundamental component of autonomous driving systems, as it can provide precise environmental information about driving scenes. Recent work on vectorized map generation could produce merely 65% local map elements around the ego-vehicle at runtime by one tour with onboard sensors, leaving a puzzle of how to construct a global HD map projected in the world coordinate system under high-quality standards. To address the issue, we present GNMap as an end-to-end generative neural network to automatically construct HD maps with multiple vectorized tiles which are locally produced by autonomous vehicles through several tours. It leverages a multi-layer and attention-based autoencoder as the shared network, of which parameters are learned from two different tasks (i.e., pretraining and finetuning, respectively) to ensure both the completeness of generated maps and the correctness of element categories. Abundant qualitative evaluations are conducted on a real-world dataset and experimental results show that GNMap can surpass the SOTA method by more than 5% F1 score, reaching the level of industrial usage with a small amount of manual modification. We have already deployed it at Navinfo Co., Ltd., serving as an indispensable software to automatically build HD maps for autonomous driving systems.
Read more9/6/2024