Genetic Algorithm-based Routing and Scheduling for Wildfire Suppression using a Team of UAVs

0

Sign in to get full access
Overview
- Wildfire management is a critical task that can benefit from the use of Unmanned Aerial Vehicles (UAVs)
- This paper proposes a genetic algorithm-based approach for routing and scheduling a team of UAVs for wildfire suppression
- The goal is to effectively allocate tasks and coordinate the movement of UAVs to respond to wildfires efficiently
Plain English Explanation
The paper describes a system that uses a genetic algorithm to coordinate a team of UAVs for wildfire suppression. Genetic algorithms are a type of optimization technique that mimic natural selection to find the best solutions to complex problems.
In this case, the genetic algorithm is used to route and schedule the UAVs to respond to multiple wildfires simultaneously. The algorithm determines the optimal path for each UAV and the tasks it should perform, such as monitoring, reporting, or extinguishing fires.
The goal is to efficiently allocate resources and coordinate the UAV team to combat wildfires as quickly and effectively as possible. This is important because wildfires can quickly grow out of control and cause significant damage if not addressed promptly.
By using a genetic algorithm, the system can adaptively adjust the UAV routes and task assignments as the situation evolves, responding to changing conditions on the ground. This allows the team of UAVs to be more responsive and effective in their wildfire suppression efforts.
Technical Explanation
The paper presents a genetic algorithm-based approach for routing and scheduling a team of UAVs for wildfire suppression. The algorithm aims to optimize the allocation of UAVs to different wildfire locations and the tasks they perform, such as monitoring, reporting, and extinguishing fires.
The problem is formulated as a multi-objective optimization problem, where the objectives include minimizing the total travel distance of the UAVs, minimizing the time required to extinguish all fires, and maximizing the coverage of the area affected by the wildfires.
The genetic algorithm uses a population of candidate solutions, where each solution represents a specific assignment of UAVs to wildfire locations and the tasks they perform. The algorithm iteratively evolves these candidate solutions, applying genetic operators like selection, crossover, and mutation, to converge towards the optimal solution.
The paper also introduces a novel fitness function that considers the urgency and severity of the wildfires, as well as the capabilities of the UAVs, to guide the optimization process. This helps the algorithm prioritize the most critical fires and allocate resources accordingly.
The proposed approach is evaluated through simulation experiments, where the genetic algorithm-based routing and scheduling is compared to other methods, such as a greedy algorithm and a random assignment. The results demonstrate that the genetic algorithm-based approach outperforms the other methods in terms of the considered objectives, highlighting its effectiveness in coordinating a team of UAVs for wildfire suppression.
Critical Analysis
The paper presents a promising approach for using a genetic algorithm to coordinate a team of UAVs for wildfire suppression. The key strengths of the proposed method include its ability to adaptively adjust the UAV routes and task assignments in response to changing conditions, as well as its consideration of the urgency and severity of the wildfires to prioritize resource allocation.
However, the paper does not address some potential limitations and areas for further research. For example, the simulation-based evaluation may not fully capture the real-world challenges and complexities of wildfire suppression, such as the impact of weather conditions, terrain, and communication constraints on the UAV operations.
Additionally, the paper does not discuss the computational complexity and scalability of the genetic algorithm, which could be a concern when dealing with large-scale wildfire incidents and a large number of UAVs. Exploring ways to optimize the algorithm's performance or investigate decentralized approaches could be valuable areas for future research.
Overall, the paper presents a promising approach for using genetic algorithms to coordinate UAV teams for wildfire suppression, but further research and validation in real-world settings would be necessary to fully assess the practical feasibility and effectiveness of the proposed method.
Conclusion
This paper introduces a genetic algorithm-based approach for routing and scheduling a team of UAVs for wildfire suppression. The key contribution is the use of a genetic algorithm to efficiently allocate UAVs to different wildfire locations and coordinate their tasks, such as monitoring, reporting, and extinguishing fires.
The proposed method demonstrates promising results in simulation experiments, outperforming other approaches in terms of minimizing travel distance, response time, and maximizing coverage. The adaptive nature of the genetic algorithm and its consideration of wildfire urgency and severity are identified as key strengths of the approach.
While the paper provides a solid foundation for using genetic algorithms in this domain, further research is needed to address potential limitations, such as the impact of real-world constraints and the scalability of the algorithm. Nonetheless, the paper presents an important step towards leveraging the capabilities of UAVs and optimization techniques to enhance wildfire management and response efforts.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Genetic Algorithm-based Routing and Scheduling for Wildfire Suppression using a Team of UAVs
Josy John, Suresh Sundaram
This paper addresses early wildfire management using a team of UAVs for the mitigation of fires. The early detection and mitigation systems help in alleviating the destruction with reduced resource utilization. A Genetic Algorithm-based Routing and Scheduling with Time constraints (GARST) is proposed to find the shortest schedule route to mitigate the fires as Single UAV Tasks (SUT). The objective of GARST is to compute the route and schedule of the UAVs so that the UAVS reach the assigned fire locations before the fire becomes a Multi UAV Task (MUT) and completely quench the fire using the extinguisher. The fitness function used for the genetic algorithm is the total quench time for mitigation of total fires. The selection, crossover, mutation operators, and elitist strategies collectively ensure the exploration and exploitation of the solution space, maintaining genetic diversity, preventing premature convergence, and preserving high-performing individuals for the effective optimization of solutions. The GARST effectively addresses the challenges posed by the NP-complete problem of routing and scheduling for growing tasks with time constraints. The GARST is able to handle infeasible scenarios effectively, contributing to the overall optimization of the wildfire management system.
Read more7/30/2024
0
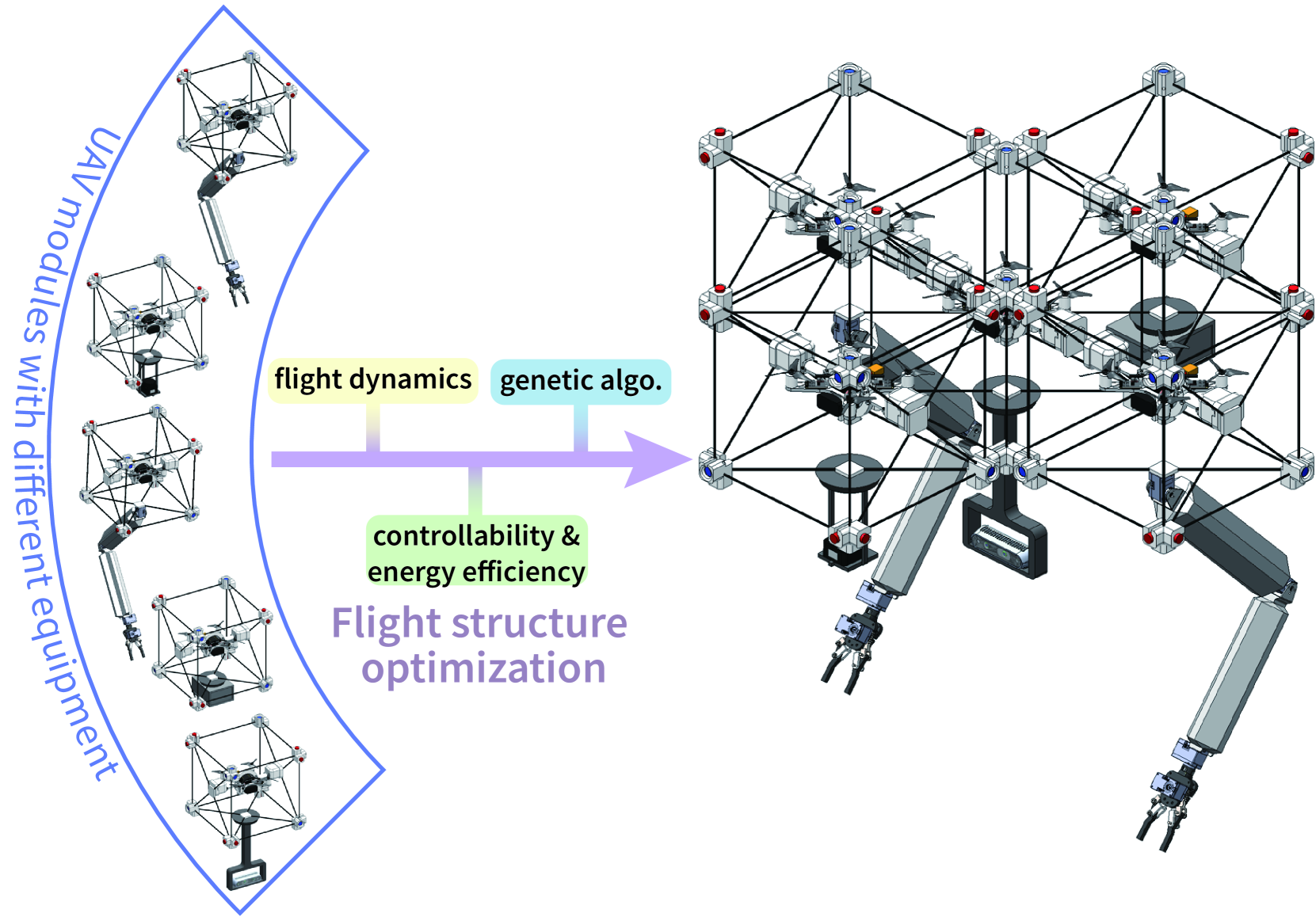
Flight Structure Optimization of Modular Reconfigurable UAVs
Yao Su, Ziyuan Jiao, Zeyu Zhang, Jingwen Zhang, Hang Li, Meng Wang, Hangxin Liu
This paper presents a Genetic Algorithm (GA) designed to reconfigure a large group of modular Unmanned Aerial Vehicles (UAVs), each with different weights and inertia parameters, into an over-actuated flight structure with improved dynamic properties. Previous research efforts either utilized expert knowledge to design flight structures for a specific task or relied on enumeration-based algorithms that required extensive computation to find an optimal one. However, both approaches encounter challenges in accommodating the heterogeneity among modules. Our GA addresses these challenges by incorporating the complexities of over-actuation and dynamic properties into its formulation. Additionally, we employ a tree representation and a vector representation to describe flight structures, facilitating efficient crossover operations and fitness evaluations within the GA framework, respectively. Using cubic modular quadcopters capable of functioning as omni-directional thrust generators, we validate that the proposed approach can (i) adeptly identify suboptimal configurations ensuring over-actuation while ensuring trajectory tracking accuracy and (ii) significantly reduce computational costs compared to traditional enumeration-based methods.
Read more7/8/2024

0
Energy-Aware Routing Algorithm for Mobile Ground-to-Air Charging
Bill Cai, Fei Lu, Lifeng Zhou
We investigate the problem of energy-constrained planning for a cooperative system of an Unmanned Ground Vehicles (UGV) and an Unmanned Aerial Vehicle (UAV). In scenarios where the UGV serves as a mobile base to ferry the UAV and as a charging station to recharge the UAV, we formulate a novel energy-constrained routing problem. To tackle this problem, we design an energy-aware routing algorithm, aiming to minimize the overall mission duration under the energy limitations of both vehicles. The algorithm first solves a Traveling Salesman Problem (TSP) to generate a guided tour. Then, it employs the Monte-Carlo Tree Search (MCTS) algorithm to refine the tour and generate paths for the two vehicles. We evaluate the performance of our algorithm through extensive simulations and a proof-of-concept experiment. The results show that our algorithm consistently achieves near-optimal mission time and maintains fast running time across a wide range of problem instances.
Read more8/9/2024

0
A Resource-Efficient Decentralized Sequential Planner for Spatiotemporal Wildfire Mitigation
Josy John, Shridhar Velhal, Suresh Sundaram
This paper proposes a Conflict-aware Resource-Efficient Decentralized Sequential planner (CREDS) for early wildfire mitigation using multiple heterogeneous Unmanned Aerial Vehicles (UAVs). Multi-UAV wildfire management scenarios are non-stationary, with spatially clustered dynamically spreading fires, potential pop-up fires, and partial observability due to limited UAV numbers and sensing range. The objective of CREDS is to detect and sequentially mitigate all growing fires as Single-UAV Tasks (SUT), minimizing biodiversity loss through rapid UAV intervention and promoting efficient resource utilization by avoiding complex multi-UAV coordination. CREDS employs a three-phased approach, beginning with fire detection using a search algorithm, followed by local trajectory generation using the auction-based Resource-Efficient Decentralized Sequential planner (REDS), incorporating the novel non-stationary cost function, the Deadline-Prioritized Mitigation Cost (DPMC). Finally, a conflict-aware consensus algorithm resolves conflicts to determine a global trajectory for spatiotemporal mitigation. The performance evaluation of the CREDS for partial and full observability conditions with both heterogeneous and homogeneous UAV teams for different fires-to-UAV ratios demonstrates a $100%$ success rate for ratios up to $4$ and a high success rate for the critical ratio of $5$, outperforming baselines. Heterogeneous UAV teams outperform homogeneous teams in handling heterogeneous deadlines of SUT mitigation. CREDS exhibits scalability and $100%$ convergence, demonstrating robustness against potential deadlock assignments, enhancing its success rate compared to the baseline approaches.
Read more7/30/2024