Flight Structure Optimization of Modular Reconfigurable UAVs

0
Sign in to get full access
Overview
- This paper explores the optimization of flight structure for modular reconfigurable unmanned aerial vehicles (UAVs).
- Modular reconfigurable UAVs can change their physical structure to adapt to different tasks and environments.
- The authors present a method to optimize the flight structure of these UAVs to improve their performance.
Plain English Explanation
The paper discusses a type of drone called a "modular reconfigurable UAV." These drones can change their physical shape and structure, allowing them to adapt to different tasks and environments. For example, a modular drone could reconfigure itself to have more or fewer propellers, change its wing shape, or adjust its overall size and weight.
The key idea in the paper is to optimize the flight structure of these modular drones. This means finding the best physical configuration for the drone to perform a specific task, such as carrying a heavy payload or flying long distances. The authors present a method to systematically explore the different ways the drone can be configured and identify the optimal setup.
By optimizing the flight structure, the modular drones can fly more efficiently, carry heavier loads, travel further, or accomplish other goals more effectively. This could make these versatile drones even more useful for a variety of applications, from search and rescue to package delivery.
Technical Explanation
The paper proposes an approach to optimize the flight structure of modular reconfigurable UAVs. These UAVs can change their physical configuration, such as the number and placement of propellers, wing shape, and overall size and weight. The authors develop a method to systematically explore the design space of possible configurations and identify the optimal flight structure for a given task or mission.
The optimization process involves evaluating the performance of the UAV under different configurations using a physics-based simulation model. Key performance metrics include flight time, payload capacity, and energy efficiency. The authors then use a multi-objective optimization algorithm to find the Pareto-optimal configurations that represent the best tradeoffs between these competing objectives.
The results show that the optimized flight structures can significantly improve the UAV's capabilities compared to a fixed configuration. For example, the modular UAV can reconfigure itself to carry heavier payloads or fly longer distances by adjusting its structure. The authors also demonstrate the ability to generate 6D trajectories for these reconfigurable UAVs to navigate complex environments.
Critical Analysis
The paper presents a promising approach to optimizing the flight structure of modular reconfigurable UAVs. However, the authors acknowledge several limitations and areas for future research:
-
The simulation model used in the optimization process may not fully capture the complexity of real-world flight dynamics, especially for highly reconfigurable UAVs. Further validation with physical prototypes would strengthen the results.
-
The optimization process assumes that the UAV can seamlessly reconfigure its structure in-flight. In practice, there may be technical challenges and time delays associated with physical reconfiguration that need to be considered.
-
The paper focuses on single-UAV optimization, but many real-world applications involve multiple UAVs cooperating to accomplish a task. Extending the optimization to consider swarm behaviors could lead to more practical solutions.
-
The authors do not explore the potential impact of modular reconfigurable UAVs on safety, privacy, and other societal considerations. These aspects should be carefully considered as the technology matures.
Overall, the research demonstrates the potential benefits of optimizing the flight structure of modular UAVs, but further work is needed to address the practical challenges and broader implications of this technology.
Conclusion
This paper presents a method to optimize the flight structure of modular reconfigurable UAVs. By systematically exploring the design space of possible configurations, the authors show that these versatile drones can be tuned to perform specific tasks more effectively, such as carrying heavier payloads or flying longer distances.
The ability to reconfigure the physical structure of UAVs opens up new possibilities for adapting to different environments and mission requirements. However, the practical implementation of this technology must also consider real-world constraints, safety concerns, and societal impacts. Further research and development in this area could lead to more capable and adaptable UAV systems that provide significant benefits across a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Flight Structure Optimization of Modular Reconfigurable UAVs
Yao Su, Ziyuan Jiao, Zeyu Zhang, Jingwen Zhang, Hang Li, Meng Wang, Hangxin Liu
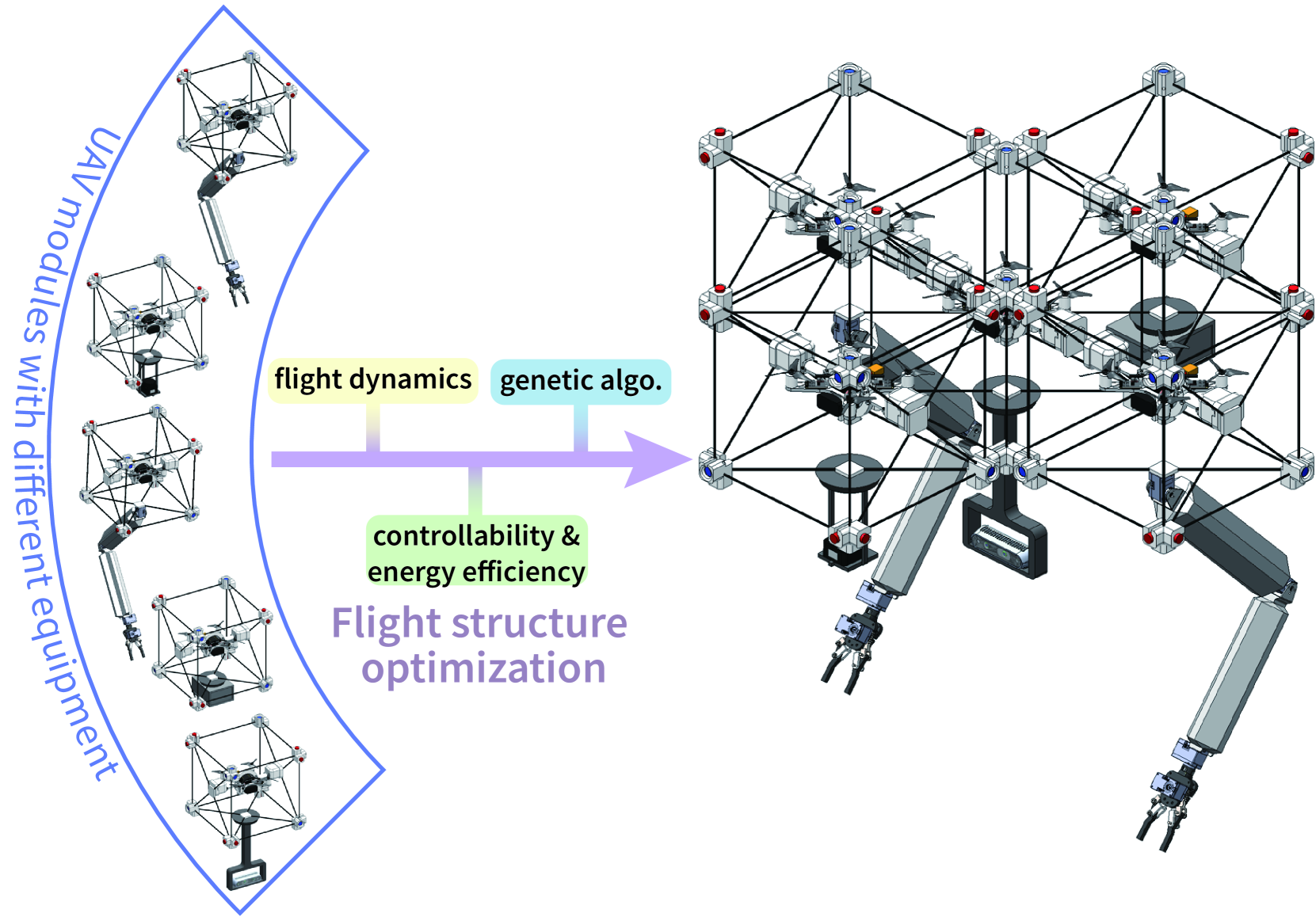
This paper presents a Genetic Algorithm (GA) designed to reconfigure a large group of modular Unmanned Aerial Vehicles (UAVs), each with different weights and inertia parameters, into an over-actuated flight structure with improved dynamic properties. Previous research efforts either utilized expert knowledge to design flight structures for a specific task or relied on enumeration-based algorithms that required extensive computation to find an optimal one. However, both approaches encounter challenges in accommodating the heterogeneity among modules. Our GA addresses these challenges by incorporating the complexities of over-actuation and dynamic properties into its formulation. Additionally, we employ a tree representation and a vector representation to describe flight structures, facilitating efficient crossover operations and fitness evaluations within the GA framework, respectively. Using cubic modular quadcopters capable of functioning as omni-directional thrust generators, we validate that the proposed approach can (i) adeptly identify suboptimal configurations ensuring over-actuation while ensuring trajectory tracking accuracy and (ii) significantly reduce computational costs compared to traditional enumeration-based methods.
Read more7/8/2024

0
Genetic Algorithm-based Routing and Scheduling for Wildfire Suppression using a Team of UAVs
Josy John, Suresh Sundaram
This paper addresses early wildfire management using a team of UAVs for the mitigation of fires. The early detection and mitigation systems help in alleviating the destruction with reduced resource utilization. A Genetic Algorithm-based Routing and Scheduling with Time constraints (GARST) is proposed to find the shortest schedule route to mitigate the fires as Single UAV Tasks (SUT). The objective of GARST is to compute the route and schedule of the UAVs so that the UAVS reach the assigned fire locations before the fire becomes a Multi UAV Task (MUT) and completely quench the fire using the extinguisher. The fitness function used for the genetic algorithm is the total quench time for mitigation of total fires. The selection, crossover, mutation operators, and elitist strategies collectively ensure the exploration and exploitation of the solution space, maintaining genetic diversity, preventing premature convergence, and preserving high-performing individuals for the effective optimization of solutions. The GARST effectively addresses the challenges posed by the NP-complete problem of routing and scheduling for growing tasks with time constraints. The GARST is able to handle infeasible scenarios effectively, contributing to the overall optimization of the wildfire management system.
Read more7/30/2024
📉
0
Modular Multi-Rotors: From Quadrotors to Fully-Actuated Aerial Vehicles
Jiawei Xu, Diego S. D'Antonio, David Salda~na
Traditional aerial vehicles have specific characteristics to perform specific tasks but designing a versatile vehicle that can adapt depending on the task is still a challenge. Based on modularity, we propose an aerial robotic system that can increase its payload capacity and actuated degrees of freedom by reconfiguring heterogeneous modules to adapt to different task specifications. The system consists of cuboid modules propelled by quadrotors with tilted rotors. We present two module designs with different actuation properties. By assembling different types of modules, H-ModQuad can increase its actuated degrees of freedom from 4 to 5 and 6 depending on its configuration. By extending the concept of actuation ellipsoids, we find the body frame of a vehicle with which the controller can maximize the maximum thrust. We use polytopes to represent the actuation capability of the vehicles and examine them against task requirements. We derive the modular vehicles' dynamics and propose a general control strategy that applies for all possible numbers of actuated degrees of freedom. The design is validated with simulations and experiments using actual robots, showing that the modular vehicles provide different actuation properties.
Read more5/2/2024

0
An exact coverage path planning algorithm for UAV-based search and rescue operations
Sina Kazemdehbashi, Yanchao Liu
Unmanned aerial vehicles (UAVs) are increasingly utilized in global search and rescue efforts, enhancing operational efficiency. In these missions, a coordinated swarm of UAVs is deployed to efficiently cover expansive areas by capturing and analyzing aerial imagery and footage. Rapid coverage is paramount in these scenarios, as swift discovery can mean the difference between life and death for those in peril. This paper focuses on optimizing flight path planning for multiple UAVs in windy conditions to efficiently cover rectangular search areas in minimal time. We address this challenge by dividing the search area into a grid network and formulating it as a mixed-integer program (MIP). Our research introduces a precise lower bound for the objective function and an exact algorithm capable of finding either the optimal solution or a near-optimal solution with a constant absolute gap to optimality. Notably, as the problem complexity increases, our solution exhibits a diminishing relative optimality gap while maintaining negligible computational costs compared to the MIP approach.
Read more5/21/2024