GeoBench: Benchmarking and Analyzing Monocular Geometry Estimation Models

0
Sign in to get full access
Overview
- This paper introduces GeoBench, a comprehensive benchmark for evaluating monocular geometry estimation models.
- GeoBench provides diverse datasets, standardized evaluation metrics, and comprehensive analysis tools to facilitate the development and comparison of these models.
- The paper presents an in-depth analysis of several state-of-the-art monocular geometry estimation models, uncovering their strengths, weaknesses, and potential areas for improvement.
Plain English Explanation
The research paper introduces a new benchmark called GeoBench that is designed to evaluate the performance of monocular geometry estimation models. Monocular geometry estimation is the task of using a single camera (i.e., a monocular sensor) to estimate the 3D geometry of a scene, which is useful for applications like autonomous driving, augmented reality, and robotics.
GeoBench provides a variety of datasets, standardized evaluation metrics, and analysis tools to help researchers and developers compare and improve their monocular geometry estimation models. The paper then applies GeoBench to analyze several state-of-the-art models, highlighting their strengths, weaknesses, and potential areas for future improvement. This kind of in-depth benchmarking and analysis is crucial for advancing the field of monocular geometry estimation and ensuring that these models can be effectively deployed in real-world applications.
Technical Explanation
The paper introduces GeoBench: Benchmarking and Analyzing Monocular Geometry Estimation Models, a comprehensive benchmark for evaluating monocular geometry estimation models. GeoBench provides a diverse set of datasets, standardized evaluation metrics, and comprehensive analysis tools to facilitate the development and comparison of these models.
The authors present an in-depth analysis of several state-of-the-art monocular geometry estimation models using GeoBench, including self-supervised pretraining and finetuning for monocular depth estimation, repurposing diffusion-based image generators for monocular depth estimation, unsupervised monocular depth estimation based on hierarchical feature fusion, self-supervised geometry-guided initialization for robust monocular depth estimation, and domain-transferred synthetic data generation for improving monocular depth estimation. The analysis uncovers the strengths, weaknesses, and potential areas for improvement in these models.
Critical Analysis
The paper provides a comprehensive and rigorous evaluation of monocular geometry estimation models, which is crucial for advancing the field. The authors have carefully designed the GeoBench benchmark to include diverse datasets, standardized metrics, and powerful analysis tools. This will enable researchers to thoroughly test and compare their models, identify their limitations, and drive further improvements.
One potential limitation of the study is that it focuses primarily on depth estimation, which is just one aspect of monocular geometry estimation. Future research could expand the benchmark to include other geometric properties, such as surface normals, 3D object detection, and semantic segmentation. Additionally, the paper does not delve into the computational efficiency and real-time performance of the evaluated models, which are crucial considerations for practical deployment.
Overall, the GeoBench benchmark and the in-depth analysis presented in this paper are valuable contributions to the field of monocular geometry estimation. The insights gained from this work can guide the development of more robust, accurate, and versatile models that can be reliably deployed in real-world applications.
Conclusion
This research paper introduces a comprehensive benchmark called GeoBench for evaluating monocular geometry estimation models. GeoBench provides a diverse set of datasets, standardized evaluation metrics, and powerful analysis tools to facilitate the development and comparison of these models.
The paper presents an in-depth analysis of several state-of-the-art monocular geometry estimation models using GeoBench, uncovering their strengths, weaknesses, and potential areas for improvement. This rigorous benchmarking and analysis is a crucial step in advancing the field and ensuring that these models can be effectively deployed in real-world applications, such as autonomous driving, augmented reality, and robotics.
The insights gained from this work can guide researchers and developers in creating more robust, accurate, and versatile monocular geometry estimation models that can reliably perceive the 3D structure of the world from a single camera.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GeoBench: Benchmarking and Analyzing Monocular Geometry Estimation Models
Yongtao Ge, Guangkai Xu, Zhiyue Zhao, Libo Sun, Zheng Huang, Yanlong Sun, Hao Chen, Chunhua Shen
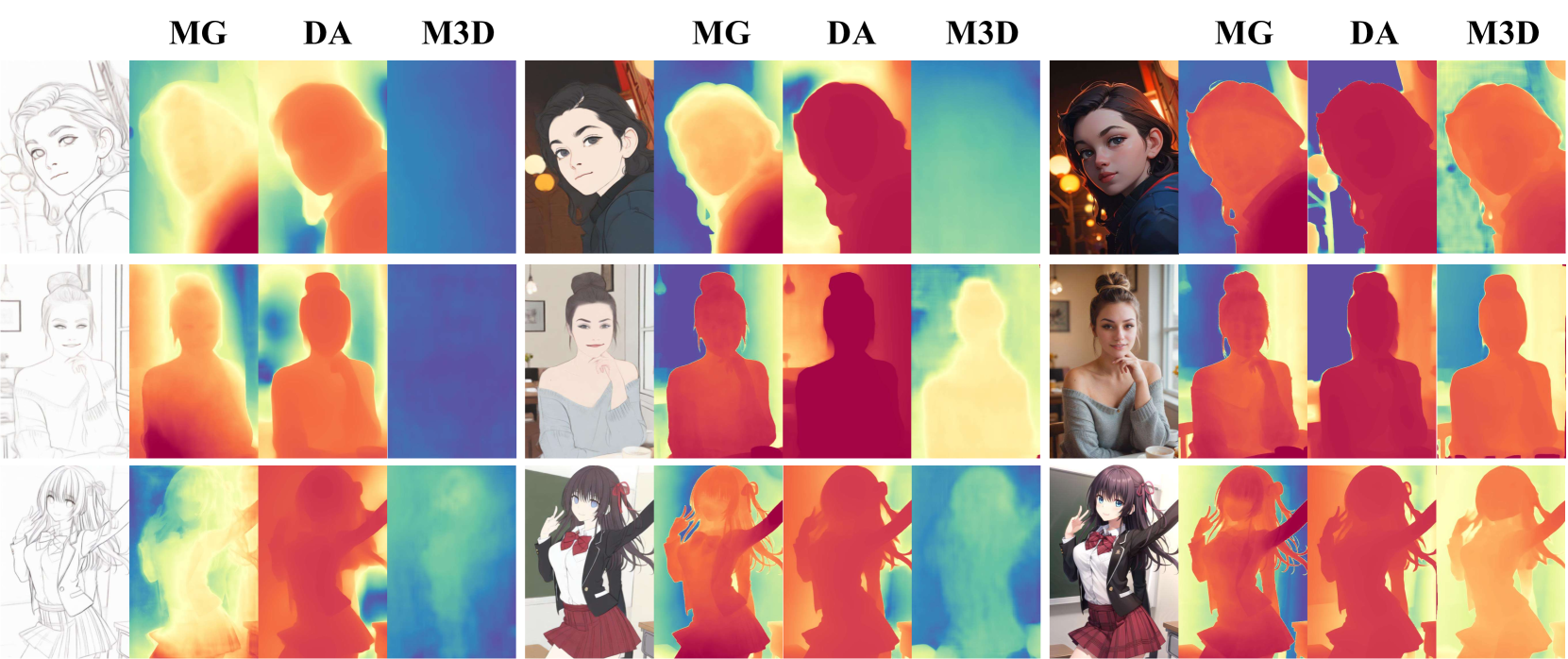
Recent advances in discriminative and generative pretraining have yielded geometry estimation models with strong generalization capabilities. While discriminative monocular geometry estimation methods rely on large-scale fine-tuning data to achieve zero-shot generalization, several generative-based paradigms show the potential of achieving impressive generalization performance on unseen scenes by leveraging pre-trained diffusion models and fine-tuning on even a small scale of synthetic training data. Frustratingly, these models are trained with different recipes on different datasets, making it hard to find out the critical factors that determine the evaluation performance. Besides, current geometry evaluation benchmarks have two main drawbacks that may prevent the development of the field, i.e., limited scene diversity and unfavorable label quality. To resolve the above issues, (1) we build fair and strong baselines in a unified codebase for evaluating and analyzing the geometry estimation models; (2) we evaluate monocular geometry estimators on more challenging benchmarks for geometry estimation task with diverse scenes and high-quality annotations. Our results reveal that pre-trained using large data, discriminative models such as DINOv2, can outperform generative counterparts with a small amount of high-quality synthetic data under the same training configuration, which suggests that fine-tuning data quality is a more important factor than the data scale and model architecture. Our observation also raises a question: if simply fine-tuning a general vision model such as DINOv2 using a small amount of synthetic depth data produces SOTA results, do we really need complex generative models for depth estimation? We believe this work can propel advancements in geometry estimation tasks as well as a wide range of downstream applications.
Read more6/24/2024
🔄
0
On the Viability of Monocular Depth Pre-training for Semantic Segmentation
Dong Lao, Fengyu Yang, Daniel Wang, Hyoungseob Park, Samuel Lu, Alex Wong, Stefano Soatto
The question of whether pre-training on geometric tasks is viable for downstream transfer to semantic tasks is important for two reasons, one practical and the other scientific. If the answer is positive, we may be able to reduce pre-training cost and bias from human annotators significantly. If the answer is negative, it may shed light on the role of embodiment in the emergence of language and other cognitive functions in evolutionary history. To frame the question in a way that is testable with current means, we pre-train a model on a geometric task, and test whether that can be used to prime a notion of 'object' that enables inference of semantics as soon as symbols (labels) are assigned. We choose monocular depth prediction as the geometric task, and semantic segmentation as the downstream semantic task, and design a collection of empirical tests by exploring different forms of supervision, training pipelines, and data sources for both depth pre-training and semantic fine-tuning. We find that monocular depth is a viable form of pre-training for semantic segmentation, validated by improvements over common baselines. Based on the findings, we propose several possible mechanisms behind the improvements, including their relation to dataset size, resolution, architecture, in/out-of-domain source data, and validate them through a wide range of ablation studies. We also find that optical flow, which at first glance may seem as good as depth prediction since it optimizes the same photometric reprojection error, is considerably less effective, as it does not explicitly aim to infer the latent structure of the scene, but rather the raw phenomenology of temporally adjacent images.
Read more7/19/2024

0
Self-supervised Pretraining and Finetuning for Monocular Depth and Visual Odometry
Boris Chidlovskii, Leonid Antsfeld
For the task of simultaneous monocular depth and visual odometry estimation, we propose learning self-supervised transformer-based models in two steps. Our first step consists in a generic pretraining to learn 3D geometry, using cross-view completion objective (CroCo), followed by self-supervised finetuning on non-annotated videos. We show that our self-supervised models can reach state-of-the-art performance 'without bells and whistles' using standard components such as visual transformers, dense prediction transformers and adapters. We demonstrate the effectiveness of our proposed method by running evaluations on six benchmark datasets, both static and dynamic, indoor and outdoor, with synthetic and real images. For all datasets, our method outperforms state-of-the-art methods, in particular for depth prediction task.
Read more6/18/2024
🖼️
0
Repurposing Diffusion-Based Image Generators for Monocular Depth Estimation
Bingxin Ke, Anton Obukhov, Shengyu Huang, Nando Metzger, Rodrigo Caye Daudt, Konrad Schindler
Monocular depth estimation is a fundamental computer vision task. Recovering 3D depth from a single image is geometrically ill-posed and requires scene understanding, so it is not surprising that the rise of deep learning has led to a breakthrough. The impressive progress of monocular depth estimators has mirrored the growth in model capacity, from relatively modest CNNs to large Transformer architectures. Still, monocular depth estimators tend to struggle when presented with images with unfamiliar content and layout, since their knowledge of the visual world is restricted by the data seen during training, and challenged by zero-shot generalization to new domains. This motivates us to explore whether the extensive priors captured in recent generative diffusion models can enable better, more generalizable depth estimation. We introduce Marigold, a method for affine-invariant monocular depth estimation that is derived from Stable Diffusion and retains its rich prior knowledge. The estimator can be fine-tuned in a couple of days on a single GPU using only synthetic training data. It delivers state-of-the-art performance across a wide range of datasets, including over 20% performance gains in specific cases. Project page: https://marigoldmonodepth.github.io.
Read more4/4/2024