Geometry-aware Feature Matching for Large-Scale Structure from Motion

0

Sign in to get full access
Overview
- Provides a plain English summary of a technical research paper on geometry-aware feature matching for large-scale structure from motion.
- Covers the key ideas, experiment design, architecture, and insights of the paper.
- Discusses the caveats, limitations, and areas for further research mentioned in the paper.
- Critically analyzes the research and raises potential concerns or issues not addressed in the paper.
- Summarizes the main takeaways and their potential implications for the field and society at large.
Plain English Explanation
This paper presents a new approach for matching features in large-scale 3D reconstruction tasks, known as "structure from motion." The key idea is to use information about the geometry of the scene, such as the relative positions and orientations of objects, to improve the accuracy of feature matching across different camera views.
Traditionally, feature matching has been done using appearance-based methods, which look for similarities in the visual characteristics of features. However, these methods can struggle in complex, cluttered scenes where there are many similar-looking features.
The researchers' approach, called "geometry-aware feature matching," instead leverages the 3D structure of the scene to guide the feature matching process. By considering the geometric relationships between features, the algorithm can better distinguish between similar-looking features and make more accurate matches.
The researchers tested their approach on several large-scale structure from motion datasets and found that it outperformed traditional feature matching methods, particularly in challenging scenes with many repeating patterns or occlusions.
Technical Explanation
The paper proposes a novel feature matching algorithm that incorporates geometric information to improve the accuracy of large-scale 3D reconstruction. The key components of their approach are:
-
Geometry-aware Feature Descriptors: The researchers develop a new type of feature descriptor that encodes not only the appearance of a feature, but also its geometric relationships to other features in the scene. This allows the algorithm to better distinguish between similar-looking features based on their relative positions and orientations.
-
Geometric Verification: After an initial appearance-based feature matching step, the algorithm performs a geometric verification step to refine the matches. This involves checking that the relative geometry of matched features is consistent with the overall 3D structure of the scene.
-
Iterative Optimization: The feature matching and geometric verification steps are performed iteratively, with the algorithm gradually improving the accuracy of the matches by considering both appearance and geometric information.
The researchers evaluate their approach on several large-scale structure from motion datasets, including the Aachen Day-Night and Street datasets. They show that their geometry-aware feature matching outperforms traditional appearance-based methods, particularly in challenging scenes with repetitive patterns or occlusions.
Critical Analysis
The paper presents a compelling approach to improving feature matching for large-scale 3D reconstruction, but it also has some potential limitations and areas for further research:
-
Computational Complexity: The iterative optimization process used in the geometry-aware feature matching may be computationally expensive, especially for very large scenes. The researchers do not provide a detailed analysis of the runtime performance of their algorithm.
-
Reliance on Accurate 3D Reconstruction: The geometric verification step assumes that a reasonably accurate 3D reconstruction of the scene is available. If the initial 3D structure is inaccurate or incomplete, the geometric verification may not be effective.
-
Sensitivity to Outliers: The paper does not discuss how the algorithm handles outlier features, which can be common in complex scenes. Robust outlier rejection mechanisms may be necessary to ensure the overall stability of the feature matching.
-
Generalization to Other Tasks: While the focus of the paper is on structure from motion, the geometry-aware feature matching approach may have applications in other computer vision tasks, such as object detection or visual localization. Further research is needed to explore the broader applicability of the method.
Overall, the paper presents an innovative approach to feature matching that leverages geometric information to improve the accuracy of large-scale 3D reconstruction. While there are some potential limitations, the researchers' work highlights the importance of considering the underlying geometry of a scene when working with visual features.
Conclusion
The paper introduces a novel geometry-aware feature matching algorithm that outperforms traditional appearance-based methods, particularly in challenging large-scale 3D reconstruction scenarios. By incorporating information about the geometric relationships between features, the algorithm can better distinguish between similar-looking features and make more accurate matches.
This work has important implications for a variety of computer vision applications, from 3D mapping and object recognition to visual localization and autonomous navigation. By leveraging the 3D structure of a scene, the geometry-aware feature matching approach has the potential to enable more robust and accurate computer vision systems, with applications in a wide range of industries and domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Geometry-aware Feature Matching for Large-Scale Structure from Motion
Gonglin Chen, Jinsen Wu, Haiwei Chen, Wenbin Teng, Zhiyuan Gao, Andrew Feng, Rongjun Qin, Yajie Zhao
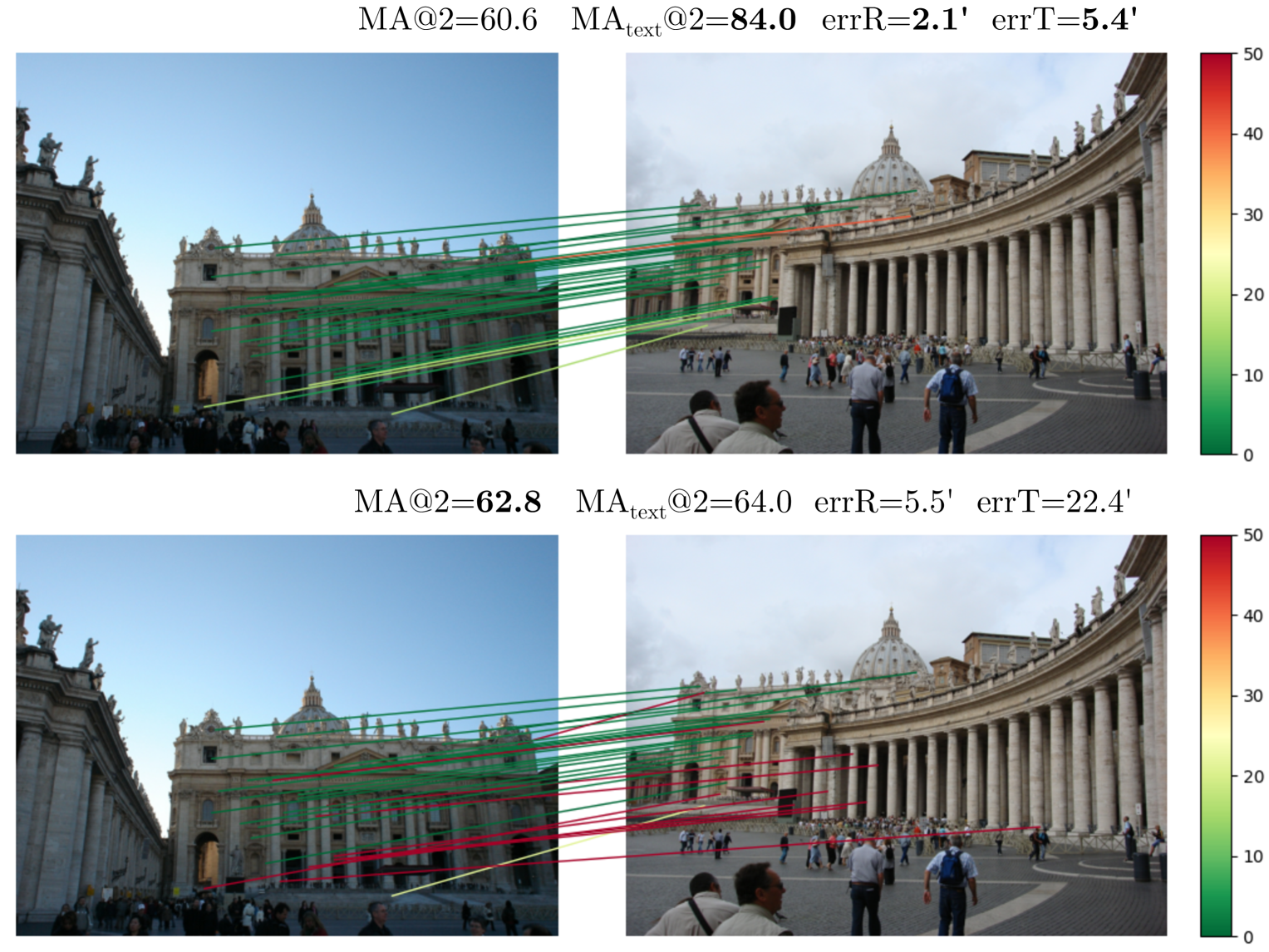
Establishing consistent and dense correspondences across multiple images is crucial for Structure from Motion (SfM) systems. Significant view changes, such as air-to-ground with very sparse view overlap, pose an even greater challenge to the correspondence solvers. We present a novel optimization-based approach that significantly enhances existing feature matching methods by introducing geometry cues in addition to color cues. This helps fill gaps when there is less overlap in large-scale scenarios. Our method formulates geometric verification as an optimization problem, guiding feature matching within detector-free methods and using sparse correspondences from detector-based methods as anchor points. By enforcing geometric constraints via the Sampson Distance, our approach ensures that the denser correspondences from detector-free methods are geometrically consistent and more accurate. This hybrid strategy significantly improves correspondence density and accuracy, mitigates multi-view inconsistencies, and leads to notable advancements in camera pose accuracy and point cloud density. It outperforms state-of-the-art feature matching methods on benchmark datasets and enables feature matching in challenging extreme large-scale settings.
Read more9/14/2024

0
Geometry-guided Feature Learning and Fusion for Indoor Scene Reconstruction
Ruihong Yin, Sezer Karaoglu, Theo Gevers
In addition to color and textural information, geometry provides important cues for 3D scene reconstruction. However, current reconstruction methods only include geometry at the feature level thus not fully exploiting the geometric information. In contrast, this paper proposes a novel geometry integration mechanism for 3D scene reconstruction. Our approach incorporates 3D geometry at three levels, i.e. feature learning, feature fusion, and network supervision. First, geometry-guided feature learning encodes geometric priors to contain view-dependent information. Second, a geometry-guided adaptive feature fusion is introduced which utilizes the geometric priors as a guidance to adaptively generate weights for multiple views. Third, at the supervision level, taking the consistency between 2D and 3D normals into account, a consistent 3D normal loss is designed to add local constraints. Large-scale experiments are conducted on the ScanNet dataset, showing that volumetric methods with our geometry integration mechanism outperform state-of-the-art methods quantitatively as well as qualitatively. Volumetric methods with ours also show good generalization on the 7-Scenes and TUM RGB-D datasets.
Read more8/29/2024

0
Unsupervised Non-Rigid Point Cloud Matching through Large Vision Models
Zhangquan Chen, Puhua Jiang, Ruqi Huang
In this paper, we propose a novel learning-based framework for non-rigid point cloud matching, which can be trained purely on point clouds without any correspondence annotation but also be extended naturally to partial-to-full matching. Our key insight is to incorporate semantic features derived from large vision models (LVMs) to geometry-based shape feature learning. Our framework effectively leverages the structural information contained in the semantic features to address ambiguities arise from self-similarities among local geometries. Furthermore, our framework also enjoys the strong generalizability and robustness regarding partial observations of LVMs, leading to improvements in the regarding point cloud matching tasks. In order to achieve the above, we propose a pixel-to-point feature aggregation module, a local and global attention network as well as a geometrical similarity loss function. Experimental results show that our method achieves state-of-the-art results in matching non-rigid point clouds in both near-isometric and heterogeneous shape collection as well as more realistic partial and noisy data.
Read more8/19/2024
0
Are Semi-Dense Detector-Free Methods Good at Matching Local Features?
Matthieu Vilain, R'emi Giraud, Hugo Germain, Guillaume Bourmaud
Semi-dense detector-free approaches (SDF), such as LoFTR, are currently among the most popular image matching methods. While SDF methods are trained to establish correspondences between two images, their performances are almost exclusively evaluated using relative pose estimation metrics. Thus, the link between their ability to establish correspondences and the quality of the resulting estimated pose has thus far received little attention. This paper is a first attempt to study this link. We start with proposing a novel structured attention-based image matching architecture (SAM). It allows us to show a counter-intuitive result on two datasets (MegaDepth and HPatches): on the one hand SAM either outperforms or is on par with SDF methods in terms of pose/homography estimation metrics, but on the other hand SDF approaches are significantly better than SAM in terms of matching accuracy. We then propose to limit the computation of the matching accuracy to textured regions, and show that in this case SAM often surpasses SDF methods. Our findings highlight a strong correlation between the ability to establish accurate correspondences in textured regions and the accuracy of the resulting estimated pose/homography. Our code will be made available.
Read more6/4/2024