FE-GUT: Factor Graph Optimization hybrid with Extended Kalman Filter for tightly coupled GNSS/UWB Integration

0
Sign in to get full access
Overview
- This paper presents a hybrid approach called FE-GUT (Factor Graph Optimization hybrid with Extended Kalman Filter) for tightly coupled integration of Global Navigation Satellite System (GNSS) and Ultra-Wideband (UWB) sensors.
- The proposed method combines the strengths of factor graph optimization and the Extended Kalman Filter (EKF) to improve the accuracy and robustness of positioning solutions.
- The authors demonstrate the effectiveness of FE-GUT through simulations and real-world experiments, showing its superiority over traditional state-space models for GNSS/UWB integration.
Plain English Explanation
The paper describes a new way to combine data from two different types of sensors - GNSS and UWB - to accurately determine the position of an object or vehicle.
The key idea is to use a hybrid approach that takes advantage of both factor graph optimization and the Extended Kalman Filter (EKF). Factor graph optimization is good at handling complex sensor data and relationships, while the EKF is efficient at tracking the object's state over time.
By combining these two techniques, the researchers were able to create a system that can accurately track the position of an object even in challenging environments where GNSS or UWB alone might struggle. The authors demonstrate through simulations and real-world tests that their FE-GUT approach outperforms traditional state-space models for GNSS/UWB integration.
Technical Explanation
The paper presents a new method called FE-GUT (Factor Graph Optimization hybrid with Extended Kalman Filter) for tightly coupled integration of GNSS and UWB sensors.
The authors first formulate a traditional discrete-time state-space model for GNSS/UWB integration, which suffers from limitations such as the inability to handle nonlinear measurements and the need for linearization. To address these issues, they propose the FE-GUT approach, which combines the strengths of factor graph optimization and the Extended Kalman Filter (EKF).
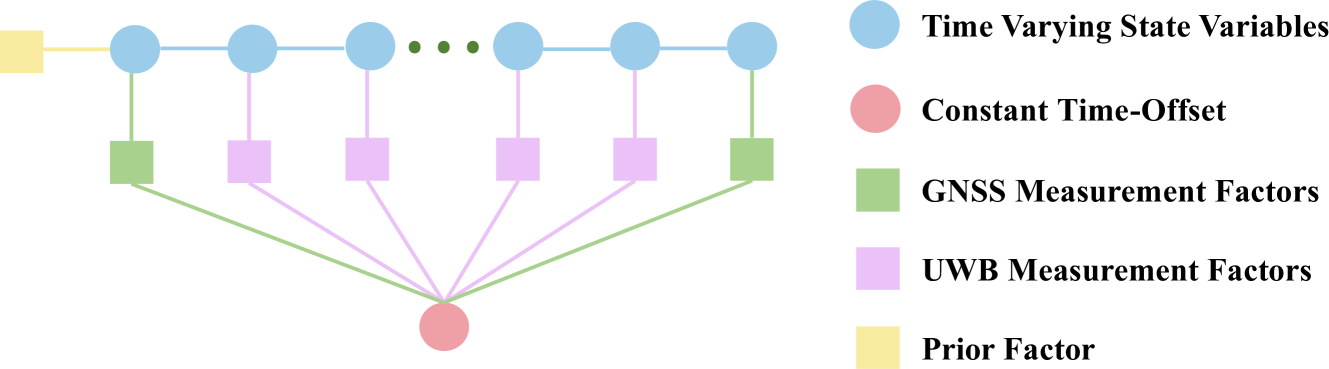
In the FE-GUT framework, the GNSS and UWB measurements are represented as factors in a factor graph. This allows for the modeling of complex sensor relationships and nonlinear measurement functions without the need for linearization. The EKF is then used to efficiently estimate the system's state by propagating the state mean and covariance through time.
The authors demonstrate the effectiveness of FE-GUT through extensive simulations and real-world experiments involving a car-mounted GNSS receiver and UWB modules. The results show that FE-GUT outperforms the traditional state-space model in terms of positioning accuracy and robustness, especially in challenging environments with limited GNSS availability or UWB coverage.
Critical Analysis
The paper presents a well-designed and thorough study of the FE-GUT approach for GNSS/UWB integration. The authors have carefully considered the limitations of traditional state-space models and have proposed a compelling solution that leverages the strengths of both factor graph optimization and the Extended Kalman Filter.
One potential limitation of the research is the reliance on simulations and a limited set of real-world experiments. While the results are promising, further validation with larger-scale and more diverse datasets would help strengthen the conclusions. Additionally, the authors do not discuss the computational complexity of the FE-GUT approach compared to the traditional state-space model, which could be an important consideration for real-time applications.
Another area for further research could be the integration of additional sensor modalities, such as inertial measurement units (IMUs) or Bluetooth Low Energy (BLE), to further improve the robustness and accuracy of the positioning solution. Exploring the potential for adaptive or learning-based techniques to optimize the fusion of GNSS and UWB data could also be an interesting direction.
Conclusion
The FE-GUT approach presented in this paper represents a significant advancement in the field of GNSS/UWB integration for positioning and navigation applications. By combining factor graph optimization and the Extended Kalman Filter, the researchers have developed a hybrid method that can effectively handle the challenges of nonlinear measurements and limited sensor availability.
The results demonstrate the superior performance of FE-GUT over traditional state-space models, suggesting that this approach could be a valuable tool for a wide range of applications, such as autonomous vehicles, indoor/outdoor tracking, and robotics. As the research in this area continues to evolve, the insights and techniques presented in this paper will likely serve as a foundation for further advancements in sensor fusion and robust positioning solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FE-GUT: Factor Graph Optimization hybrid with Extended Kalman Filter for tightly coupled GNSS/UWB Integration
Qijia Zhao, Shaolin Lu, Jianan Lou, Rong Zhang
Precise positioning and navigation information has been increasingly important with the development of the consumer electronics market. Due to some deficits of Global Navigation Satellite System (GNSS), such as susceptible to interferences, integrating of GNSS with additional alternative sensors is a promising approach to overcome the performance limitations of GNSS-based localization systems. Ultra-Wideband (UWB) can be used to enhance GNSS in constructing an integrated localization system. However, most low-cost UWB devices lack a hardware-level time synchronization feature, which necessitates the estimation and compensation of the time-offset in the tightly coupled GNSS/UWB integration. Given the flexibility of probabilistic graphical models, the time-offset can be modeled as an invariant constant in the discretization of the continuous model. This work proposes a novel architecture in which Factor Graph Optimization (FGO) is hybrid with Extend Kalman Filter (EKF) for tightly coupled GNSS/UWB integration with online Temporal calibration (FE-GUT). FGO is utilized to precisely estimate the time-offset, while EKF provides initailization for the new factors and performs time-offset compensation. Simulation-based experiments validate the integrated localization performance of FE-GUT. In a four-wheeled robot scenario, the results demonstrate that, compared to EKF, FE-GUT can improve horizontal and vertical localization accuracy by 58.59% and 34.80%, respectively, while the time-offset estimation accuracy is improved by 76.80%. All the source codes and datasets can be gotten via https://github.com/zhaoqj23/FE-GUT/.
Read more7/10/2024
🛠️
0
GNSS/Multi-Sensor Fusion Using Continuous-Time Factor Graph Optimization for Robust Localization
Haoming Zhang, Chih-Chun Chen, Heike Vallery, Timothy D. Barfoot
Accurate and robust vehicle localization in highly urbanized areas is challenging. Sensors are often corrupted in those complicated and large-scale environments. This paper introduces GNSS-FGO, an online and global trajectory estimator that fuses GNSS observations alongside multiple sensor measurements for robust vehicle localization. In GNSS-FGO, we fuse asynchronous sensor measurements into the graph with a continuous-time trajectory representation using Gaussian process regression. This enables querying states at arbitrary timestamps so that sensor observations are fused without requiring strict state and measurement synchronization. Thus, the proposed method presents a generalized factor graph for multi-sensor fusion. To evaluate and study different GNSS fusion strategies, we fuse GNSS measurements in loose and tight coupling with a speed sensor, IMU, and lidar-odometry. We employed datasets from measurement campaigns in Aachen, Duesseldorf, and Cologne in experimental studies and presented comprehensive discussions on sensor observations, smoother types, and hyperparameter tuning. Our results show that the proposed approach enables robust trajectory estimation in dense urban areas, where the classic multi-sensor fusion method fails due to sensor degradation. In a test sequence containing a 17km route through Aachen, the proposed method results in a mean 2D positioning error of 0.48m while fusing raw GNSS observations with lidar odometry in a tight coupling.
Read more8/2/2024

0
GPS-IMU Sensor Fusion for Reliable Autonomous Vehicle Position Estimation
Simegnew Yihunie Alaba
Global Positioning System (GPS) navigation provides accurate positioning with global coverage, making it a reliable option in open areas with unobstructed sky views. However, signal degradation may occur in indoor spaces and urban canyons. In contrast, Inertial Measurement Units (IMUs) consist of gyroscopes and accelerometers that offer relative motion information such as acceleration and rotational changes. Unlike GPS, IMUs do not rely on external signals, making them useful in GPS-denied environments. Nonetheless, IMUs suffer from drift over time due to the accumulation of errors while integrating acceleration to determine velocity and position. Therefore, fusing the GPS and IMU is crucial for enhancing the reliability and precision of navigation systems in autonomous vehicles, especially in environments where GPS signals are compromised. To ensure smooth navigation and overcome the limitations of each sensor, the proposed method fuses GPS and IMU data. This sensor fusion uses the Unscented Kalman Filter (UKF) Bayesian filtering technique. The proposed navigation system is designed to be robust, delivering continuous and accurate positioning critical for the safe operation of autonomous vehicles, particularly in GPS-denied environments. This project uses KITTI GNSS and IMU datasets for experimental validation, showing that the GNSS-IMU fusion technique reduces GNSS-only data's RMSE. The RMSE decreased from 13.214, 13.284, and 13.363 to 4.271, 5.275, and 0.224 for the x-axis, y-axis, and z-axis, respectively. The experimental result using UKF shows promising direction in improving autonomous vehicle navigation using GPS and IMU sensor fusion using the best of two sensors in GPS-denied environments.
Read more5/15/2024

0
Graph-Based vs. Error State Kalman Filter-Based Fusion Of 5G And Inertial Data For MAV Indoor Pose Estimation
Meisam Kabiri, Claudio Cimarelli, Hriday Bavle, Jose Luis Sanchez-Lopez, Holger Voos
5G New Radio Time of Arrival (ToA) data has the potential to revolutionize indoor localization for micro aerial vehicles (MAVs). However, its performance under varying network setups, especially when combined with IMU data for real-time localization, has not been fully explored so far. In this study, we develop an error state Kalman filter (ESKF) and a pose graph optimization (PGO) approach to address this gap. We systematically evaluate the performance of the derived approaches for real-time MAV localization in realistic scenarios with 5G base stations in Line-Of-Sight (LOS), demonstrating the potential of 5G technologies in this domain. In order to experimentally test and compare our localization approaches, we augment the EuRoC MAV benchmark dataset for visual-inertial odometry with simulated yet highly realistic 5G ToA measurements. Our experimental results comprehensively assess the impact of varying network setups, including varying base station numbers and network configurations, on ToA-based MAV localization performance. The findings show promising results for seamless and robust localization using 5G ToA measurements, achieving an accuracy of 15 cm throughout the entire trajectory within a graph-based framework with five 5G base stations, and an accuracy of up to 34 cm in the case of ESKF-based localization. Additionally, we measure the run time of both algorithms and show that they are both fast enough for real-time implementation.
Read more5/3/2024