GPN: Generative Point-based NeRF

0

Sign in to get full access
Overview
- The paper presents a novel generative model called "Generative Point-based NeRF" (GPN) for large-scale point cloud generation.
- GPN leverages the strengths of Neural Radiance Fields (NeRF) and point-based representations to generate high-quality, detailed point clouds.
- The model combines a NeRF-based generator with a point-based discriminator, allowing for efficient and high-fidelity point cloud synthesis.
Plain English Explanation
GPN is a new AI system that can generate detailed 3D point cloud models from scratch. Point clouds are digital representations of 3D objects or environments, made up of a large number of individual data points. The GPN model combines two powerful AI techniques - Neural Radiance Fields (NeRF) and point-based representations - to create high-quality, lifelike point cloud models.
NeRF is an AI method that can generate 3D scenes from 2D images. GPN builds on this by using a NeRF-based generator to produce the initial point cloud. It then refines and enhances the point cloud using a point-based discriminator, which checks the quality and realism of the generated points. This hybrid approach allows GPN to generate large-scale, detailed point clouds that capture the complex structures and fine details of 3D objects and environments.
The key advantage of GPN is its ability to create highly realistic and accurate point cloud models without relying on expensive 3D scanning or manual modeling. This could have important applications in areas like 3D reconstruction, virtual reality, and computer graphics, where detailed 3D models are crucial.
Technical Explanation
The GPN model consists of two main components: a NeRF-based generator and a point-based discriminator. The generator uses a NeRF architecture to produce an initial point cloud representation of the 3D scene or object. This NeRF-based generator is trained on a dataset of 3D point clouds, learning to capture the underlying geometry and appearance of the data.
The discriminator component of GPN is a point-based neural network that evaluates the quality and realism of the generated point clouds. It checks factors like the distribution, density, and structural properties of the points to ensure they match the characteristics of real, high-quality point clouds.
During training, the generator and discriminator components are optimized in an adversarial fashion, with the generator trying to fool the discriminator and the discriminator trying to accurately identify real vs. generated point clouds. This iterative process allows GPN to gradually refine and enhance the quality of the generated point clouds, resulting in highly detailed and realistic 3D models.
The authors demonstrate the capabilities of GPN through extensive experiments on large-scale point cloud datasets, showing that their model can generate point clouds with superior quality and fidelity compared to existing generative approaches. GPN also exhibits the ability to synthesize point clouds from a small number of example points, making it a versatile tool for 3D content creation.
Critical Analysis
The GPN paper presents a compelling and well-designed approach to large-scale point cloud generation. The combination of NeRF and point-based techniques is a novel and effective solution, addressing the limitations of previous generative models.
One potential limitation of the GPN approach is the computational complexity and training requirements. Generating high-quality 3D point clouds can be resource-intensive, and the iterative adversarial training process used by GPN may require significant computational power and training time. This could limit the practical deployment of the model, especially in real-time or low-resource applications.
Additionally, while the authors demonstrate the ability of GPN to synthesize point clouds from a small number of examples, the performance in few-shot or zero-shot scenarios may still be an area for further research and improvement. Enhancing the model's generalization capabilities could expand its usefulness in a wider range of applications.
Overall, the GPN paper makes a valuable contribution to the field of 3D content generation, offering a novel and effective approach to high-fidelity point cloud synthesis. As the demand for detailed 3D models continues to grow, techniques like GPN will play an increasingly important role in various industries and applications.
Conclusion
The GPN paper presents a novel generative model that combines the strengths of Neural Radiance Fields (NeRF) and point-based representations to generate high-quality, large-scale 3D point clouds. By leveraging a NeRF-based generator and a point-based discriminator, GPN is able to create detailed and realistic point cloud models that capture the complex structures and fine details of 3D objects and environments.
The key advantages of GPN include its ability to generate point clouds without relying on expensive 3D scanning or manual modeling, as well as its versatility in handling few-shot and zero-shot scenarios. These capabilities make GPN a promising tool for a wide range of applications, from 3D reconstruction and virtual reality to computer graphics and beyond.
While the GPN approach shows impressive results, the computational complexity and training requirements may pose some practical challenges. Continued research and optimization efforts could help address these limitations, further enhancing the model's real-world applicability and expanding the possibilities for AI-driven 3D content creation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GPN: Generative Point-based NeRF
Haipeng Wang
Scanning real-life scenes with modern registration devices typically gives incomplete point cloud representations, primarily due to the limitations of partial scanning, 3D occlusions, and dynamic light conditions. Recent works on processing incomplete point clouds have always focused on point cloud completion. However, these approaches do not ensure consistency between the completed point cloud and the captured images regarding color and geometry. We propose using Generative Point-based NeRF (GPN) to reconstruct and repair a partial cloud by fully utilizing the scanning images and the corresponding reconstructed cloud. The repaired point cloud can achieve multi-view consistency with the captured images at high spatial resolution. For the finetunes of a single scene, we optimize the global latent condition by incorporating an Auto-Decoder architecture while retaining multi-view consistency. As a result, the generated point clouds are smooth, plausible, and geometrically consistent with the partial scanning images. Extensive experiments on ShapeNet demonstrate that our works achieve competitive performances to the other state-of-the-art point cloud-based neural scene rendering and editing performances.
Read more4/15/2024
0
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
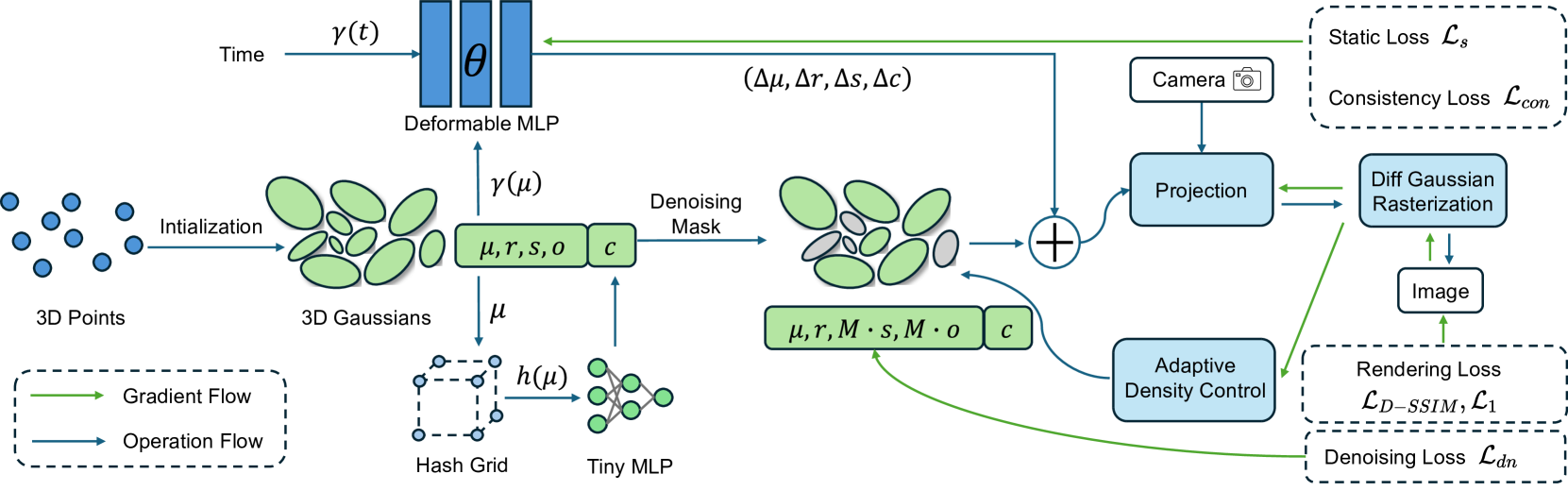
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
Read more5/29/2024
🧠
0
Points2NeRF: Generating Neural Radiance Fields from 3D point cloud
Dominik Zimny, Joanna Waczy'nska, Tomasz Trzci'nski, Przemys{l}aw Spurek
Contemporary registration devices for 3D visual information, such as LIDARs and various depth cameras, capture data as 3D point clouds. In turn, such clouds are challenging to be processed due to their size and complexity. Existing methods address this problem by fitting a mesh to the point cloud and rendering it instead. This approach, however, leads to the reduced fidelity of the resulting visualization and misses color information of the objects crucial in computer graphics applications. In this work, we propose to mitigate this challenge by representing 3D objects as Neural Radiance Fields (NeRFs). We leverage a hypernetwork paradigm and train the model to take a 3D point cloud with the associated color values and return a NeRF network's weights that reconstruct 3D objects from input 2D images. Our method provides efficient 3D object representation and offers several advantages over the existing approaches, including the ability to condition NeRFs and improved generalization beyond objects seen in training. The latter we also confirmed in the results of our empirical evaluation.
Read more6/13/2024

0
NeRF2Points: Large-Scale Point Cloud Generation From Street Views' Radiance Field Optimization
Peng Tu, Xun Zhou, Mingming Wang, Xiaojun Yang, Bo Peng, Ping Chen, Xiu Su, Yawen Huang, Yefeng Zheng, Chang Xu
Neural Radiance Fields (NeRF) have emerged as a paradigm-shifting methodology for the photorealistic rendering of objects and environments, enabling the synthesis of novel viewpoints with remarkable fidelity. This is accomplished through the strategic utilization of object-centric camera poses characterized by significant inter-frame overlap. This paper explores a compelling, alternative utility of NeRF: the derivation of point clouds from aggregated urban landscape imagery. The transmutation of street-view data into point clouds is fraught with complexities, attributable to a nexus of interdependent variables. First, high-quality point cloud generation hinges on precise camera poses, yet many datasets suffer from inaccuracies in pose metadata. Also, the standard approach of NeRF is ill-suited for the distinct characteristics of street-view data from autonomous vehicles in vast, open settings. Autonomous vehicle cameras often record with limited overlap, leading to blurring, artifacts, and compromised pavement representation in NeRF-based point clouds. In this paper, we present NeRF2Points, a tailored NeRF variant for urban point cloud synthesis, notable for its high-quality output from RGB inputs alone. Our paper is supported by a bespoke, high-resolution 20-kilometer urban street dataset, designed for point cloud generation and evaluation. NeRF2Points adeptly navigates the inherent challenges of NeRF-based point cloud synthesis through the implementation of the following strategic innovations: (1) Integration of Weighted Iterative Geometric Optimization (WIGO) and Structure from Motion (SfM) for enhanced camera pose accuracy, elevating street-view data precision. (2) Layered Perception and Integrated Modeling (LPiM) is designed for distinct radiance field modeling in urban environments, resulting in coherent point cloud representations.
Read more4/9/2024