Gr-IoU: Ground-Intersection over Union for Robust Multi-Object Tracking with 3D Geometric Constraints

0

Sign in to get full access
Overview
- The paper presents a novel ground-based intersection over union (Gr-IoU) metric for robust multi-object tracking with 3D geometric constraints.
- Gr-IoU leverages 3D information to better capture the spatial relationship between object detections, improving data association and tracking performance.
- The proposed approach outperforms state-of-the-art methods on standard multi-object tracking benchmarks.
Plain English Explanation
The paper introduces a new way to track multiple objects in a video or image sequence. Tracking multiple objects is an important task in computer vision, with applications like self-driving cars, surveillance, and robotics.
Traditionally, object tracking has relied on the Intersection over Union (IoU) metric to compare the overlap between detected objects in consecutive frames. However, the standard IoU metric only considers the 2D bounding boxes of the objects, and does not take into account the 3D spatial relationship between them.
The researchers' key insight is that by incorporating 3D geometric information, they can create a more robust tracking metric, called Gr-IoU (Ground-Intersection over Union). Gr-IoU not only looks at the 2D overlap between objects, but also considers how the objects are positioned relative to the ground plane. This allows the tracker to better distinguish between objects that may have similar 2D bounding boxes but are actually located at different depths or heights.
By using this more nuanced 3D-aware metric, the Gr-IoU tracker is able to outperform other state-of-the-art multi-object tracking methods on standard benchmark datasets. The improved tracking accuracy could lead to better performance in applications like autonomous driving, where reliably tracking the movements of surrounding vehicles and pedestrians is crucial for safe navigation.
Technical Explanation
The paper introduces a new metric called Gr-IoU (Ground-Intersection over Union) for multi-object tracking. Gr-IoU builds upon the standard Intersection over Union (IoU) metric, but incorporates 3D geometric constraints to better capture the spatial relationships between object detections.
Specifically, Gr-IoU computes the intersection and union between the ground-projected 2D bounding boxes of the objects, rather than just their 2D bounding boxes. This allows the metric to account for the relative depth and height of the objects, not just their 2D overlap.
The authors show that this 3D-aware Gr-IoU metric leads to improved data association and tracking performance compared to using the standard IoU. They evaluate their approach on several multi-object tracking benchmarks, including MOT17 and KITTI, and demonstrate state-of-the-art results.
The key technical insights behind Gr-IoU are:
- Leveraging the ground plane information to project 3D object detections into a common 2D ground plane.
- Computing the intersection and union between the ground-projected 2D bounding boxes, rather than the original 3D bounding boxes or 2D image-plane bounding boxes.
- Incorporating this Gr-IoU metric into a classic multi-object tracking pipeline, using it to perform data association and track management.
Through extensive experiments, the authors show that the Gr-IoU metric is more robust to challenging scenarios like occlusions and scale changes, leading to significant improvements in tracking accuracy and performance.
Critical Analysis
The proposed Gr-IoU metric is a promising approach for enhancing multi-object tracking, particularly in 3D or real-world environments where the relative depth and height of objects is important for reliable data association.
One potential limitation of the work is that it relies on accurate 3D object detections, which may not always be available or reliable, especially in monocular camera setups. The authors acknowledge this and suggest exploring ways to integrate uncertainty or partial 3D information into the Gr-IoU computation.
Additionally, while the paper demonstrates strong results on standard benchmarks, it would be valuable to see the Gr-IoU tracker evaluated on more diverse datasets and real-world applications to fully understand its strengths and limitations. Assessing the computational efficiency and robustness of the approach in practical scenarios would also be helpful.
Overall, the Gr-IoU metric represents an interesting and useful contribution to the field of multi-object tracking, leveraging 3D geometric information to improve upon traditional 2D-based methods. Further research and development in this direction could lead to even more robust and reliable tracking systems for a wide range of computer vision applications.
Conclusion
The paper presents a novel Gr-IoU (Ground-Intersection over Union) metric for multi-object tracking that incorporates 3D geometric constraints to better capture the spatial relationships between object detections. By considering the ground-projected 2D bounding boxes of objects, rather than just their 2D image-plane bounding boxes, Gr-IoU is able to achieve state-of-the-art performance on standard multi-object tracking benchmarks.
This 3D-aware tracking approach could have significant implications for real-world applications like autonomous driving, surveillance, and robotics, where reliable object tracking is crucial for safe and efficient operation. While the method relies on accurate 3D object detections, which may not always be available, the core ideas behind Gr-IoU represent an important step forward in enhancing multi-object tracking with richer geometric information.
Overall, the Gr-IoU paper makes a valuable contribution to the field of computer vision, demonstrating the potential benefits of incorporating 3D context into traditionally 2D-based tracking algorithms. As the field continues to advance, further research and development in this direction could lead to even more robust and versatile tracking solutions for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Gr-IoU: Ground-Intersection over Union for Robust Multi-Object Tracking with 3D Geometric Constraints
Keisuke Toida, Naoki Kato, Osamu Segawa, Takeshi Nakamura, Kazuhiro Hotta
We propose a Ground IoU (Gr-IoU) to address the data association problem in multi-object tracking. When tracking objects detected by a camera, it often occurs that the same object is assigned different IDs in consecutive frames, especially when objects are close to each other or overlapping. To address this issue, we introduce Gr-IoU, which takes into account the 3D structure of the scene. Gr-IoU transforms traditional bounding boxes from the image space to the ground plane using the vanishing point geometry. The IoU calculated with these transformed bounding boxes is more sensitive to the front-to-back relationships of objects, thereby improving data association accuracy and reducing ID switches. We evaluated our Gr-IoU method on the MOT17 and MOT20 datasets, which contain diverse tracking scenarios including crowded scenes and sequences with frequent occlusions. Experimental results demonstrated that Gr-IoU outperforms conventional real-time methods without appearance features.
Read more9/6/2024

0
Unified-IoU: For High-Quality Object Detection
Xiangjie Luo, Zhihao Cai, Bo Shao, Yingxun Wang
Object detection is an important part in the field of computer vision, and the effect of object detection is directly determined by the regression accuracy of the prediction box. As the key to model training, IoU (Intersection over Union) greatly shows the difference between the current prediction box and the Ground Truth box. Subsequent researchers have continuously added more considerations to IoU, such as center distance, aspect ratio, and so on. However, there is an upper limit to just refining the geometric differences; And there is a potential connection between the new consideration index and the IoU itself, and the direct addition or subtraction between the two may lead to the problem of over-consideration. Based on this, we propose a new IoU loss function, called Unified-IoU (UIoU), which is more concerned with the weight assignment between different quality prediction boxes. Specifically, the loss function dynamically shifts the model's attention from low-quality prediction boxes to high-quality prediction boxes in a novel way to enhance the model's detection performance on high-precision or intensive datasets and achieve a balance in training speed. Our proposed method achieves better performance on multiple datasets, especially at a high IoU threshold, UIoU has a more significant improvement effect compared with other improved IoU losses. Our code is publicly available at: https://github.com/lxj-drifter/UIOU_files.
Read more8/14/2024
0
Hierarchical IoU Tracking based on Interval
Yunhao Du, Zhicheng Zhao, Fei Su
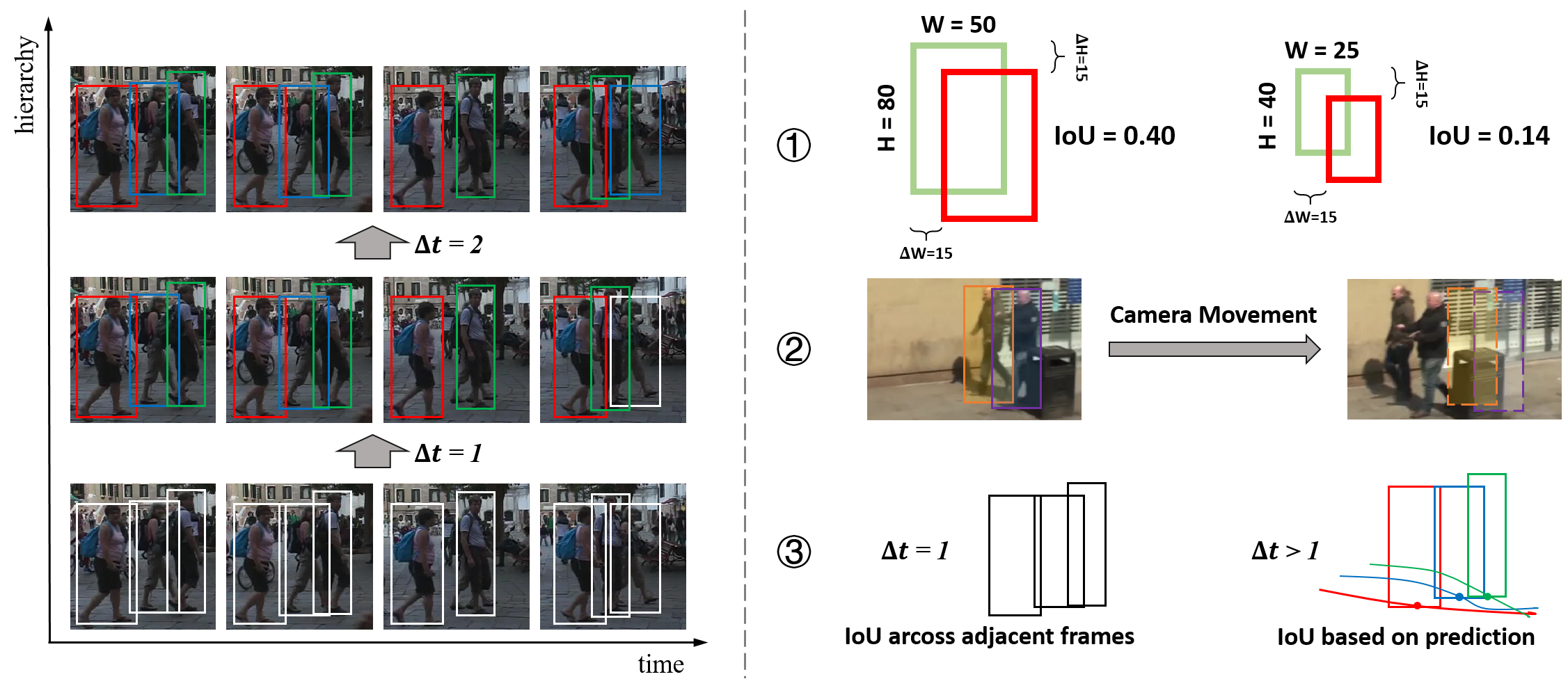
Multi-Object Tracking (MOT) aims to detect and associate all targets of given classes across frames. Current dominant solutions, e.g. ByteTrack and StrongSORT++, follow the hybrid pipeline, which first accomplish most of the associations in an online manner, and then refine the results using offline tricks such as interpolation and global link. While this paradigm offers flexibility in application, the disjoint design between the two stages results in suboptimal performance. In this paper, we propose the Hierarchical IoU Tracking framework, dubbed HIT, which achieves unified hierarchical tracking by utilizing tracklet intervals as priors. To ensure the conciseness, only IoU is utilized for association, while discarding the heavy appearance models, tricky auxiliary cues, and learning-based association modules. We further identify three inconsistency issues regarding target size, camera movement and hierarchical cues, and design corresponding solutions to guarantee the reliability of associations. Though its simplicity, our method achieves promising performance on four datasets, i.e., MOT17, KITTI, DanceTrack and VisDrone, providing a strong baseline for future tracking method design. Moreover, we experiment on seven trackers and prove that HIT can be seamlessly integrated with other solutions, whether they are motion-based, appearance-based or learning-based. Our codes will be released at https://github.com/dyhBUPT/HIT.
Read more6/21/2024

0
FPDIoU Loss: A Loss Function for Efficient Bounding Box Regression of Rotated Object Detection
Siliang Ma, Yong Xu
Bounding box regression is one of the important steps of object detection. However, rotation detectors often involve a more complicated loss based on SkewIoU which is unfriendly to gradient-based training. Most of the existing loss functions for rotated object detection calculate the difference between two bounding boxes only focus on the deviation of area or each points distance (e.g., $mathcal{L}_{Smooth-ell 1}$, $mathcal{L}_{RotatedIoU}$ and $mathcal{L}_{PIoU}$). The calculation process of some loss functions is extremely complex (e.g. $mathcal{L}_{KFIoU}$). In order to improve the efficiency and accuracy of bounding box regression for rotated object detection, we proposed a novel metric for arbitrary shapes comparison based on minimum points distance, which takes most of the factors from existing loss functions for rotated object detection into account, i.e., the overlap or nonoverlapping area, the central points distance and the rotation angle. We also proposed a loss function called $mathcal{L}_{FPDIoU}$ based on four points distance for accurate bounding box regression focusing on faster and high quality anchor boxes. In the experiments, $FPDIoU$ loss has been applied to state-of-the-art rotated object detection (e.g., RTMDET, H2RBox) models training with three popular benchmarks of rotated object detection including DOTA, DIOR, HRSC2016 and two benchmarks of arbitrary orientation scene text detection including ICDAR 2017 RRC-MLT and ICDAR 2019 RRC-MLT, which achieves better performance than existing loss functions.
Read more5/21/2024