Hierarchical IoU Tracking based on Interval

0
Sign in to get full access
Overview
• This paper presents a hierarchical IoU tracking algorithm based on interval analysis to address the challenges of multi-object tracking in complex environments.
• The approach uses a hierarchical structure to efficiently compute the Intersection over Union (IoU) between object detections and existing tracks, enabling robust tracking even when objects are partially occluded or exhibit complex motion patterns.
• The authors demonstrate the effectiveness of their method on several standard benchmarks, showing improvements over state-of-the-art multi-object tracking algorithms.
Plain English Explanation
• Tracking multiple objects in a video can be challenging, especially when the objects are partially blocked from view or move in complex ways.
• The researchers developed a new algorithm that uses a hierarchical (or layered) approach to calculate the overlap between the detected objects and the existing tracks (the paths the objects have taken so far).
• This allows the system to efficiently track objects even when they are partially obscured or moving in complicated patterns, which is an improvement over previous tracking methods.
• The authors tested their algorithm on several standard datasets used to evaluate multi-object tracking, and showed that it outperforms other state-of-the-art tracking approaches.
Technical Explanation
• The key innovation in this paper is the use of a hierarchical structure to compute the Intersection over Union (IoU) between object detections and existing tracks.
• IoU is a common metric used in multi-object tracking to determine how well a detection matches an existing track. The higher the IoU, the more overlap there is between the detection and the track.
• Typically, computing IoU for all possible detection-track pairs can be computationally expensive, especially as the number of objects increases.
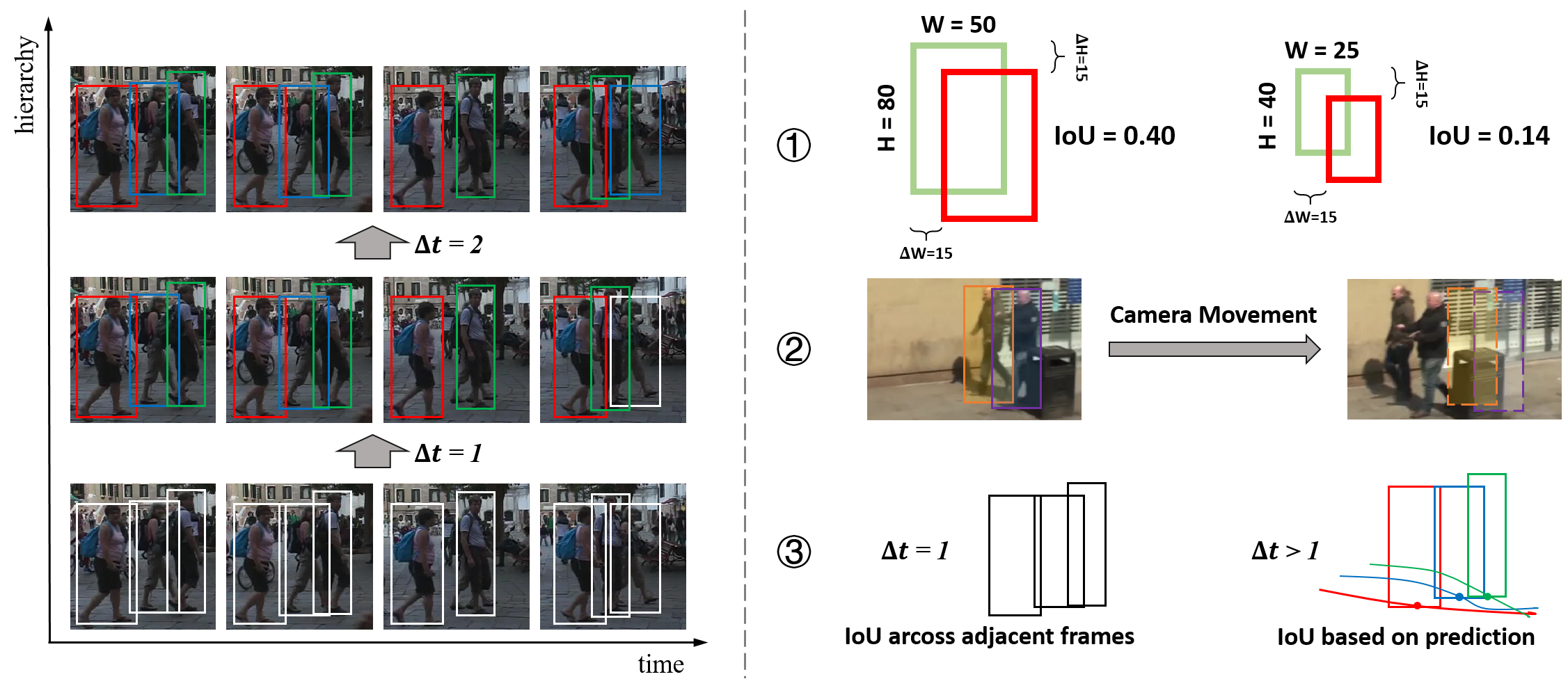
• To address this, the authors propose a hierarchical IoU computation scheme that first compares the bounding boxes of detections and tracks at a coarse level, and then progressively refines the comparisons at finer levels of the hierarchy.
• This allows the system to efficiently identify promising detection-track associations, while avoiding unnecessary computations for pairs that are unlikely to have high IoU.
• The authors also incorporate interval analysis techniques to handle uncertainty in the object locations and dimensions, further improving the robustness of the tracking algorithm.
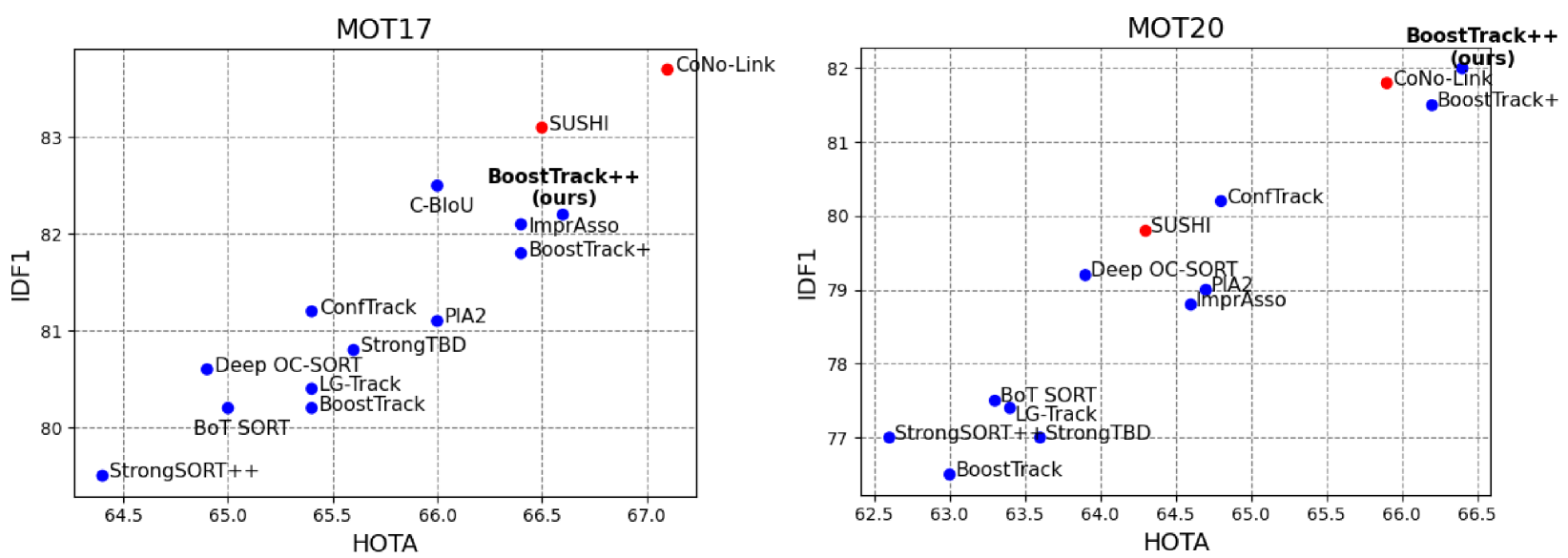
• Experiments on standard multi-object tracking benchmarks demonstrate the effectiveness of the proposed approach, with improvements over other recent tracking methods.
Critical Analysis
• While the hierarchical IoU tracking algorithm presented in this paper shows promising results, the authors acknowledge that it may not be as effective in scenarios with severe or frequent occlusions, as the interval-based approach may struggle to accurately model the object positions in such cases.
• Additionally, the paper does not discuss the computational complexity of the proposed method in detail, which could be an important consideration for real-time applications.
• Further research could explore ways to combine the hierarchical IoU tracking approach with other techniques, such as appearance-based re-identification or motion prediction models, to enhance the overall tracking performance in challenging scenarios.
Conclusion
• This paper presents a novel hierarchical IoU tracking algorithm that leverages interval analysis to efficiently compute object associations, enabling robust multi-object tracking even in the presence of partial occlusions and complex motion patterns.
• The authors demonstrate the effectiveness of their approach on standard benchmarks, where it outperforms other state-of-the-art tracking methods.
• While the technique has some limitations, the hierarchical structure and the use of interval analysis represent an interesting and promising direction for advancing the field of multi-object tracking, with potential applications in areas such as surveillance, autonomous vehicles, and sports analytics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hierarchical IoU Tracking based on Interval
Yunhao Du, Zhicheng Zhao, Fei Su
Multi-Object Tracking (MOT) aims to detect and associate all targets of given classes across frames. Current dominant solutions, e.g. ByteTrack and StrongSORT++, follow the hybrid pipeline, which first accomplish most of the associations in an online manner, and then refine the results using offline tricks such as interpolation and global link. While this paradigm offers flexibility in application, the disjoint design between the two stages results in suboptimal performance. In this paper, we propose the Hierarchical IoU Tracking framework, dubbed HIT, which achieves unified hierarchical tracking by utilizing tracklet intervals as priors. To ensure the conciseness, only IoU is utilized for association, while discarding the heavy appearance models, tricky auxiliary cues, and learning-based association modules. We further identify three inconsistency issues regarding target size, camera movement and hierarchical cues, and design corresponding solutions to guarantee the reliability of associations. Though its simplicity, our method achieves promising performance on four datasets, i.e., MOT17, KITTI, DanceTrack and VisDrone, providing a strong baseline for future tracking method design. Moreover, we experiment on seven trackers and prove that HIT can be seamlessly integrated with other solutions, whether they are motion-based, appearance-based or learning-based. Our codes will be released at https://github.com/dyhBUPT/HIT.
Read more6/21/2024

0
Gr-IoU: Ground-Intersection over Union for Robust Multi-Object Tracking with 3D Geometric Constraints
Keisuke Toida, Naoki Kato, Osamu Segawa, Takeshi Nakamura, Kazuhiro Hotta
We propose a Ground IoU (Gr-IoU) to address the data association problem in multi-object tracking. When tracking objects detected by a camera, it often occurs that the same object is assigned different IDs in consecutive frames, especially when objects are close to each other or overlapping. To address this issue, we introduce Gr-IoU, which takes into account the 3D structure of the scene. Gr-IoU transforms traditional bounding boxes from the image space to the ground plane using the vanishing point geometry. The IoU calculated with these transformed bounding boxes is more sensitive to the front-to-back relationships of objects, thereby improving data association accuracy and reducing ID switches. We evaluated our Gr-IoU method on the MOT17 and MOT20 datasets, which contain diverse tracking scenarios including crowded scenes and sequences with frequent occlusions. Experimental results demonstrated that Gr-IoU outperforms conventional real-time methods without appearance features.
Read more9/6/2024
0
BoostTrack++: using tracklet information to detect more objects in multiple object tracking
Vukav{s}in Stanojevi'c, Branimir Todorovi'c
Multiple object tracking (MOT) depends heavily on selection of true positive detected bounding boxes. However, this aspect of the problem is mostly overlooked or mitigated by employing two-stage association and utilizing low confidence detections in the second stage. Recently proposed BoostTrack attempts to avoid the drawbacks of multiple stage association approach and use low-confidence detections by applying detection confidence boosting. In this paper, we identify the limitations of the confidence boost used in BoostTrack and propose a method to improve its performance. To construct a richer similarity measure and enable a better selection of true positive detections, we propose to use a combination of shape, Mahalanobis distance and novel soft BIoU similarity. We propose a soft detection confidence boost technique which calculates new confidence scores based on the similarity measure and the previous confidence scores, and we introduce varying similarity threshold to account for lower similarity measure between detections and tracklets which are not regularly updated. The proposed additions are mutually independent and can be used in any MOT algorithm. Combined with the BoostTrack+ baseline, our method achieves near state of the art results on the MOT17 dataset and new state of the art HOTA and IDF1 scores on the MOT20 dataset. The source code is available at: https://github.com/vukasin-stanojevic/BoostTrack .
Read more8/26/2024

0
View-Centric Multi-Object Tracking with Homographic Matching in Moving UAV
Deyi Ji, Siqi Gao, Lanyun Zhu, Qi Zhu, Yiru Zhao, Peng Xu, Hongtao Lu, Feng Zhao, Jieping Ye
In this paper, we address the challenge of multi-object tracking (MOT) in moving Unmanned Aerial Vehicle (UAV) scenarios, where irregular flight trajectories, such as hovering, turning left/right, and moving up/down, lead to significantly greater complexity compared to fixed-camera MOT. Specifically, changes in the scene background not only render traditional frame-to-frame object IOU association methods ineffective but also introduce significant view shifts in the objects, which complicates tracking. To overcome these issues, we propose a novel universal HomView-MOT framework, which for the first time, harnesses the view Homography inherent in changing scenes to solve MOT challenges in moving environments, incorporating Homographic Matching and View-Centric concepts. We introduce a Fast Homography Estimation (FHE) algorithm for rapid computation of Homography matrices between video frames, enabling object View-Centric ID Learning (VCIL) and leveraging multi-view Homography to learn cross-view ID features. Concurrently, our Homographic Matching Filter (HMF) maps object bounding boxes from different frames onto a common view plane for a more realistic physical IOU association. Extensive experiments have proven that these innovations allow HomView-MOT to achieve state-of-the-art performance on prominent UAV MOT datasets VisDrone and UAVDT.
Read more5/15/2024