GraspXL: Generating Grasping Motions for Diverse Objects at Scale

0

Sign in to get full access
Overview
- This paper introduces GraspXL, a system for generating diverse grasping motions for a wide range of objects at scale.
- The key idea is to leverage a large dataset of human-demonstrated grasps to train a model that can generate grasping motions for new objects.
- The system is designed to handle complex, multi-fingered grasps and can produce motions for a diverse set of objects, overcoming limitations of previous approaches.
Plain English Explanation
The researchers have developed a new tool called GraspXL that can generate grasping motions for a wide variety of objects. The core idea is to use a large dataset of examples showing how humans grasp different objects. From this data, the researchers trained a machine learning model that can now generate new grasping motions for objects it hasn't seen before.
This is an important advance because previous systems were often limited to simple, single-handed grasps or a narrow set of objects. GraspXL, on the other hand, is designed to handle complex, multi-fingered grasps and can produce motions for a much more diverse set of objects. This makes it more useful for real-world applications like robotic manipulation or virtual environment interactions.
The key benefit of the GraspXL system is that it can generate these grasping motions at a large scale, without having to manually program each one. By learning from human examples, the model can adapt to new objects and situations, making it a flexible and powerful tool for interacting with the physical world.
Technical Explanation
The GraspXL system uses a large dataset of human-demonstrated grasping motions to train a machine learning model that can generate diverse grasping motions for new objects. The model takes as input a 3D mesh of an object and outputs a set of joint trajectories that describe how to grasp the object using a multi-fingered hand.
The key technical innovations include:
- A novel neural network architecture that can capture the complex kinematics and dynamics of multi-fingered grasping.
- A grasp representation that encodes both the hand shape and the contact points with the object.
- A motion synthesis approach that can generate smooth, collision-free trajectories for the hand.
- A compliant grasping strategy that allows the system to handle a diverse set of object shapes and materials.
The researchers evaluated GraspXL on a large benchmark of real-world objects and showed that it can generate high-quality grasping motions for a much more diverse set of objects compared to previous methods. This makes it a promising tool for applications in robotics, virtual environments, and beyond.
Critical Analysis
One potential limitation of the GraspXL system is that it relies on a large dataset of human-demonstrated grasps, which may be expensive or difficult to obtain. The researchers mention that they used a combination of motion capture data and crowdsourcing, but scaling this approach to an even more diverse set of objects could be challenging.
Additionally, while the system can handle a wide range of object shapes and materials, there may be some edge cases or novel object types that it struggles with. The researchers acknowledge this and suggest that further research is needed to improve the generalization capabilities of the model.
Another area for potential improvement is the computational efficiency of the system. While the researchers report fast inference times, the training process may be compute-intensive, limiting its applicability in certain real-time scenarios or resource-constrained environments.
Overall, the GraspXL system represents a significant advancement in the field of dexterous manipulation and object grasping. By leveraging a large dataset of human examples, the system can generate diverse and adaptable grasping motions, opening up new possibilities for robotic and virtual interaction. As the researchers continue to refine and expand the system, it has the potential to have a substantial impact on a wide range of applications.
Conclusion
The GraspXL system introduced in this paper represents an important step forward in the field of dexterous manipulation and object grasping. By training a machine learning model on a large dataset of human-demonstrated grasps, the researchers have developed a system that can generate diverse and adaptable grasping motions for a wide range of objects.
This advancement overcomes the limitations of previous approaches, which were often restricted to simple, single-handed grasps or a narrow set of objects. GraspXL's ability to handle complex, multi-fingered grasps and produce motions for a diverse set of objects makes it a powerful tool for applications in robotics, virtual environments, and beyond.
As the researchers continue to refine and expand the GraspXL system, it has the potential to have a significant impact on how we interact with and manipulate the physical world around us. By enabling more dexterous and adaptive grasping capabilities, GraspXL could pave the way for more advanced robotic systems, more immersive virtual experiences, and a deeper understanding of human grasping behavior.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GraspXL: Generating Grasping Motions for Diverse Objects at Scale
Hui Zhang, Sammy Christen, Zicong Fan, Otmar Hilliges, Jie Song
Human hands possess the dexterity to interact with diverse objects such as grasping specific parts of the objects and/or approaching them from desired directions. More importantly, humans can grasp objects of any shape without object-specific skills. Recent works synthesize grasping motions following single objectives such as a desired approach heading direction or a grasping area. Moreover, they usually rely on expensive 3D hand-object data during training and inference, which limits their capability to synthesize grasping motions for unseen objects at scale. In this paper, we unify the generation of hand-object grasping motions across multiple motion objectives, diverse object shapes and dexterous hand morphologies in a policy learning framework GraspXL. The objectives are composed of the graspable area, heading direction during approach, wrist rotation, and hand position. Without requiring any 3D hand-object interaction data, our policy trained with 58 objects can robustly synthesize diverse grasping motions for more than 500k unseen objects with a success rate of 82.2%. At the same time, the policy adheres to objectives, which enables the generation of diverse grasps per object. Moreover, we show that our framework can be deployed to different dexterous hands and work with reconstructed or generated objects. We quantitatively and qualitatively evaluate our method to show the efficacy of our approach. Our model, code, and the large-scale generated motions are available at https://eth-ait.github.io/graspxl/.
Read more7/15/2024
0
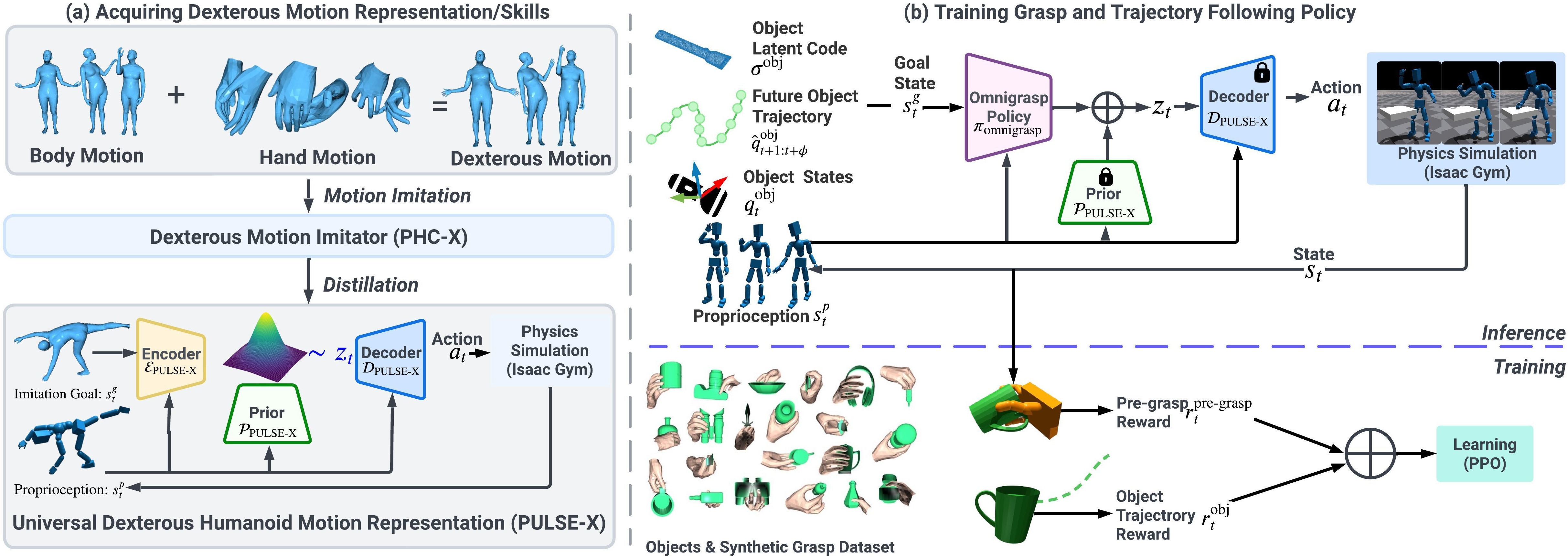
Grasping Diverse Objects with Simulated Humanoids
Zhengyi Luo, Jinkun Cao, Sammy Christen, Alexander Winkler, Kris Kitani, Weipeng Xu
We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Read more7/17/2024
0
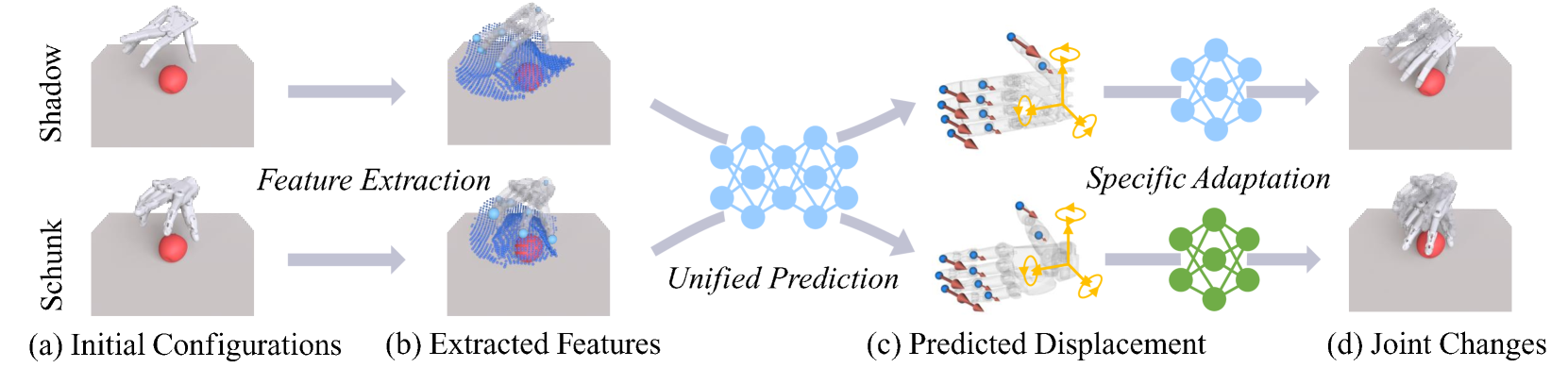
Learning Cross-hand Policies for High-DOF Reaching and Grasping
Qijin She, Shishun Zhang, Yunfan Ye, Ruizhen Hu, Kai Xu
Reaching-and-grasping is a fundamental skill for robotic manipulation, but existing methods usually train models on a specific gripper and cannot be reused on another gripper. In this paper, we propose a novel method that can learn a unified policy model that can be easily transferred to different dexterous grippers. Our method consists of two stages: a gripper-agnostic policy model that predicts the displacements of pre-defined key points on the gripper, and a gripper-specific adaptation model that translates these displacements into adjustments for controlling the grippers' joints. The gripper state and interactions with objects are captured at the finger level using robust geometric representations, integrated with a transformer-based network to address variations in gripper morphology and geometry. In the experiments, we evaluate our method on several dexterous grippers and diverse objects, and the result shows that our method significantly outperforms the baseline methods. Pioneering the transfer of grasp policies across dexterous grippers, our method effectively demonstrates its potential for learning generalizable and transferable manipulation skills for various robotic hands.
Read more7/16/2024
0
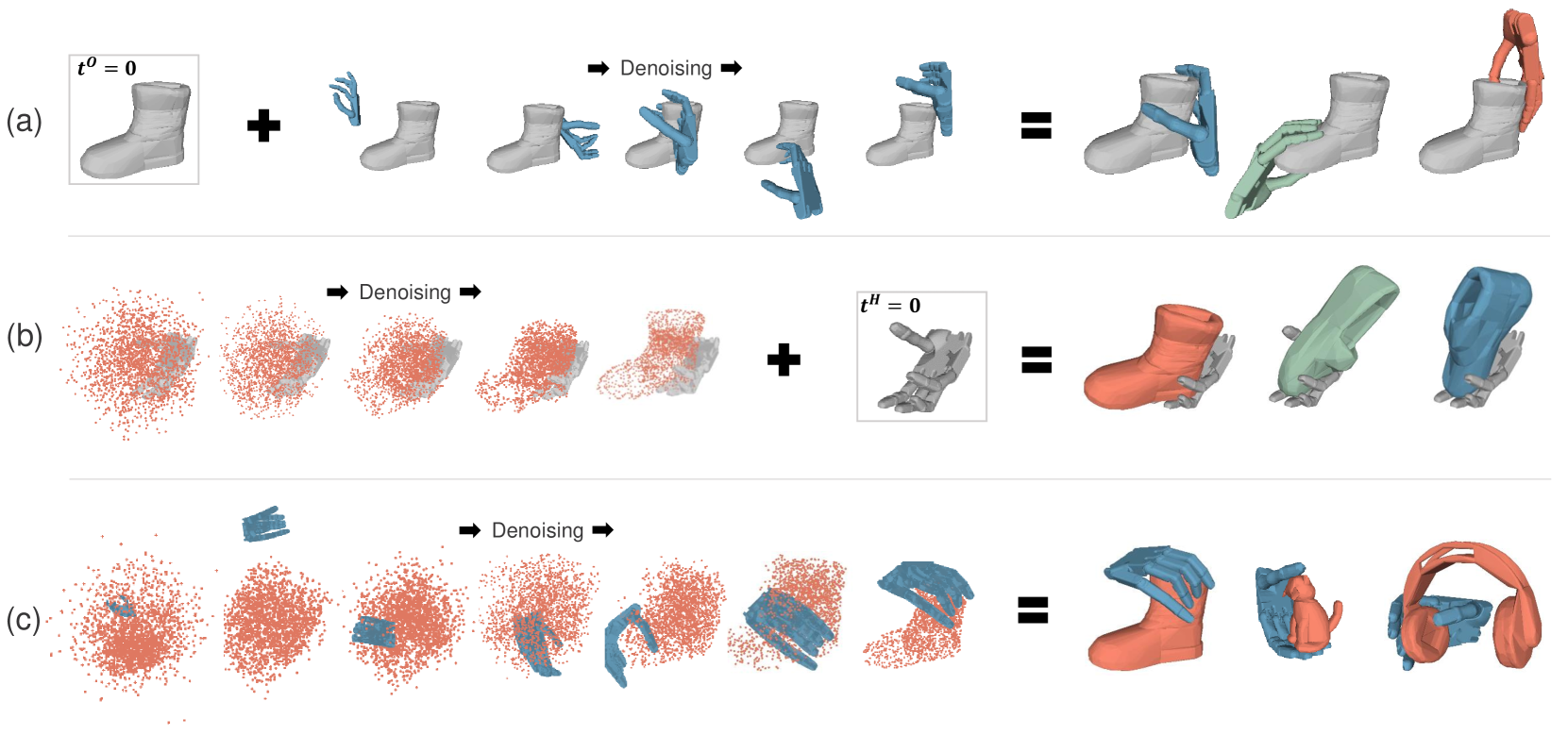
UGG: Unified Generative Grasping
Jiaxin Lu, Hao Kang, Haoxiang Li, Bo Liu, Yiding Yang, Qixing Huang, Gang Hua
Dexterous grasping aims to produce diverse grasping postures with a high grasping success rate. Regression-based methods that directly predict grasping parameters given the object may achieve a high success rate but often lack diversity. Generation-based methods that generate grasping postures conditioned on the object can often produce diverse grasping, but they are insufficient for high grasping success due to lack of discriminative information. To mitigate, we introduce a unified diffusion-based dexterous grasp generation model, dubbed the name UGG, which operates within the object point cloud and hand parameter spaces. Our all-transformer architecture unifies the information from the object, the hand, and the contacts, introducing a novel representation of contact points for improved contact modeling. The flexibility and quality of our model enable the integration of a lightweight discriminator, benefiting from simulated discriminative data, which pushes for a high success rate while preserving high diversity. Beyond grasp generation, our model can also generate objects based on hand information, offering valuable insights into object design and studying how the generative model perceives objects. Our model achieves state-of-the-art dexterous grasping on the large-scale DexGraspNet dataset while facilitating human-centric object design, marking a significant advancement in dexterous grasping research. Our project page is https://jiaxin-lu.github.io/ugg/.
Read more7/29/2024