Gravity-aware Grasp Generation with Implicit Grasp Mode Selection for Underactuated Hands

0

Sign in to get full access
Overview
- The paper proposes a method for generating grasps for underactuated robotic hands that considers the effects of gravity.
- It uses an implicit grasp mode selection approach to adaptively determine the hand posture and contact points for stable grasping.
- The method generates a large synthetic dataset of object-hand interactions to train a neural network for grasp prediction.
Plain English Explanation
The researchers developed a system to help robotic hands pick up and grasp objects more effectively, especially in cases where the object's weight and gravity play a significant role. Typical robotic hands have a fixed number of joints and motors, which limits their flexibility. [Related: Multi-Fingered Robotic Hand Grasping in Cluttered Environments]
Their approach uses an "implicit grasp mode selection" technique, which means the system can automatically adapt the hand posture and contact points to achieve a stable grasp, rather than relying on pre-programmed grasping strategies. [Related: GrainGrasp: Dexterous Grasp Generation for Fine-grained Contact]
To train this system, the researchers generated a large synthetic dataset of object-hand interactions, taking into account the effects of gravity and external forces. This allows the neural network to learn how to predict stable grasps that can counteract the influence of gravity. [Related: UGG: Unified Generative Grasping]
Technical Explanation
The paper presents a method for generating grasps for underactuated robotic hands that considers the effects of gravity on the object being grasped. The key components are:
-
Implicit Grasp Mode Selection: The system can adaptively determine the appropriate hand posture and contact points to achieve a stable grasp, rather than relying on pre-defined grasping strategies. This allows the hand to adjust its configuration based on the object's properties and external forces like gravity.
-
Synthetic Data Generation: The researchers created a large dataset of object-hand interaction simulations, taking into account the effects of gravity and other external disturbance forces. This diverse training data enables the neural network to learn how to predict stable grasps that can counteract the influence of gravity. [Related: 6-DoF Grasp Detection in Clutter with Confidence-Enhanced Receptive Fields]
-
Grasp Generation Network: The authors train a neural network using the synthetic dataset to predict stable grasps for a given object. The network learns to select the appropriate grasp mode and contact points to maintain a stable grasp even in the presence of gravity and other external forces.
Critical Analysis
The paper presents a novel approach to grasp generation that considers the effects of gravity, which is an important factor for real-world robotic manipulation tasks. The use of an implicit grasp mode selection strategy is a promising way to increase the flexibility and adaptability of underactuated robotic hands.
However, the paper does not provide much discussion on the limitations of the synthetic data generation process or the potential issues that may arise when applying the trained model to real-world scenarios. [Related: Physics-Aware Iterative Learning for Prediction and Saliency Map Generation] Additional experiments and analysis on the robustness and generalization capabilities of the proposed approach would be helpful to understand its practical applicability.
Conclusion
The paper presents a gravity-aware grasp generation method for underactuated robotic hands that uses an implicit grasp mode selection approach. By generating a large synthetic dataset of object-hand interactions and training a neural network to predict stable grasps, the system can adapt to the effects of gravity and external forces. This work represents an important step towards improving the dexterity and robustness of robotic manipulation in real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Gravity-aware Grasp Generation with Implicit Grasp Mode Selection for Underactuated Hands
Tianyi Ko, Takuya Ikeda, Thomas Stewart, Robert Lee, Koichi Nishiwaki
Learning-based grasp detectors typically assume a precision grasp, where each finger only has one contact point, and estimate the grasp probability. In this work, we propose a data generation and learning pipeline that can leverage power grasping, which has more contact points with an enveloping configuration and is robust against both positioning error and force disturbance. To train a grasp detector to prioritize power grasping while still keeping precision grasping as the secondary choice, we propose to train the network against the magnitude of disturbance in the gravity direction a grasp can resist (gravity-rejection score) rather than the binary classification of success. We also provide an efficient data generation pipeline for a dataset with gravity-rejection score annotation. In addition to thorough ablation studies, quantitative evaluation in both simulation and real-robot clarifies the significant improvement in our approach, especially when the objects are heavy.
Read more8/14/2024

0
Multi-fingered Robotic Hand Grasping in Cluttered Environments through Hand-object Contact Semantic Mapping
Lei Zhang, Kaixin Bai, Guowen Huang, Zhaopeng Chen, Jianwei Zhang
The integration of optimization method and generative models has significantly advanced dexterous manipulation techniques for five-fingered hand grasping. Yet, the application of these techniques in cluttered environments is a relatively unexplored area. To address this research gap, we have developed a novel method for generating five-fingered hand grasp samples in cluttered settings. This method emphasizes simulated grasp quality and the nuanced interaction between the hand and surrounding objects. A key aspect of our approach is our data generation method, capable of estimating contact spatial and semantic representations and affordance grasps based on object affordance information. Furthermore, our Contact Semantic Conditional Variational Autoencoder (CoSe-CVAE) network is adept at creating comprehensive contact maps from point clouds, incorporating both spatial and semantic data. We introduce a unique grasp detection technique that efficiently formulates mechanical hand grasp poses from these maps. Additionally, our evaluation model is designed to assess grasp quality and collision probability, significantly improving the practicality of five-fingered hand grasping in complex scenarios. Our data generation method outperforms previous datasets in grasp diversity, scene diversity, modality diversity. Our grasp generation method has demonstrated remarkable success, outperforming established baselines with 81.0% average success rate in real-world single-object grasping and 75.3% success rate in multi-object grasping. The dataset and supplementary materials can be found at https://sites.google.com/view/ffh-clutteredgrasping, and we will release the code upon publication.
Read more4/16/2024
0
GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, Qian Liu
One goal of dexterous robotic grasping is to allow robots to handle objects with the same level of flexibility and adaptability as humans. However, it remains a challenging task to generate an optimal grasping strategy for dexterous hands, especially when it comes to delicate manipulation and accurate adjustment the desired grasping poses for objects of varying shapes and sizes. In this paper, we propose a novel dexterous grasp generation scheme called GrainGrasp that provides fine-grained contact guidance for each fingertip. In particular, we employ a generative model to predict separate contact maps for each fingertip on the object point cloud, effectively capturing the specifics of finger-object interactions. In addition, we develop a new dexterous grasping optimization algorithm that solely relies on the point cloud as input, eliminating the necessity for complete mesh information of the object. By leveraging the contact maps of different fingertips, the proposed optimization algorithm can generate precise and determinable strategies for human-like object grasping. Experimental results confirm the efficiency of the proposed scheme.
Read more5/17/2024
0
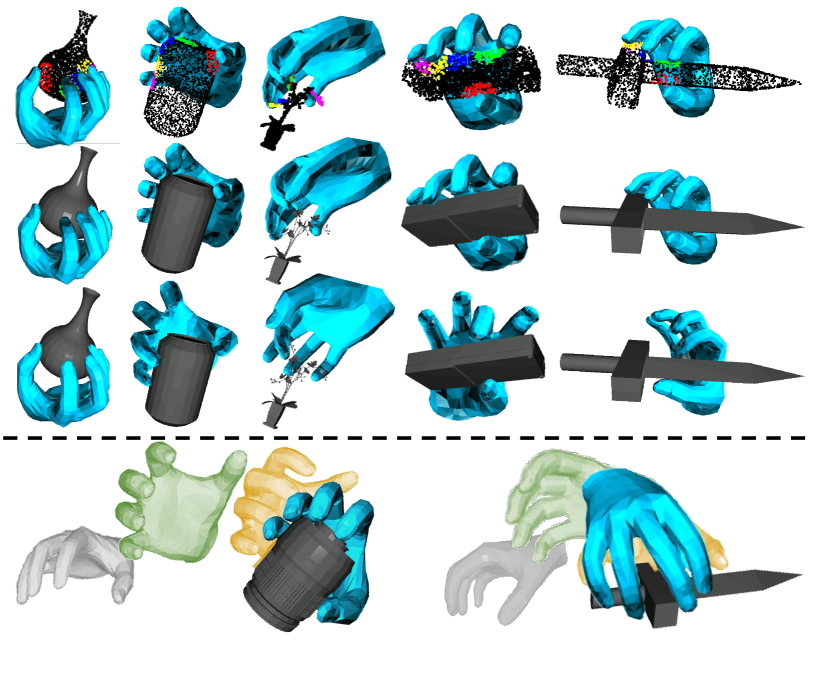
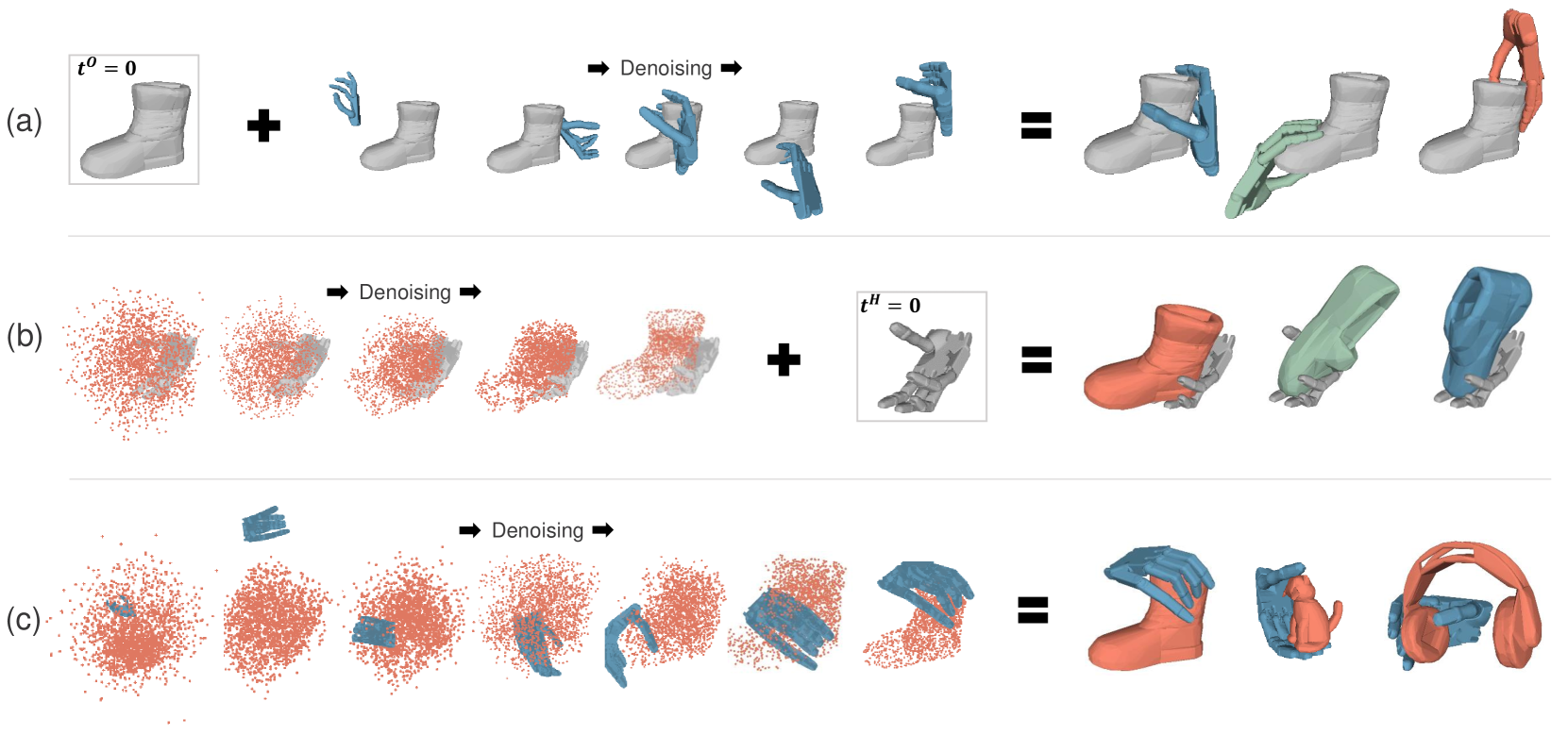
UGG: Unified Generative Grasping
Jiaxin Lu, Hao Kang, Haoxiang Li, Bo Liu, Yiding Yang, Qixing Huang, Gang Hua
Dexterous grasping aims to produce diverse grasping postures with a high grasping success rate. Regression-based methods that directly predict grasping parameters given the object may achieve a high success rate but often lack diversity. Generation-based methods that generate grasping postures conditioned on the object can often produce diverse grasping, but they are insufficient for high grasping success due to lack of discriminative information. To mitigate, we introduce a unified diffusion-based dexterous grasp generation model, dubbed the name UGG, which operates within the object point cloud and hand parameter spaces. Our all-transformer architecture unifies the information from the object, the hand, and the contacts, introducing a novel representation of contact points for improved contact modeling. The flexibility and quality of our model enable the integration of a lightweight discriminator, benefiting from simulated discriminative data, which pushes for a high success rate while preserving high diversity. Beyond grasp generation, our model can also generate objects based on hand information, offering valuable insights into object design and studying how the generative model perceives objects. Our model achieves state-of-the-art dexterous grasping on the large-scale DexGraspNet dataset while facilitating human-centric object design, marking a significant advancement in dexterous grasping research. Our project page is https://jiaxin-lu.github.io/ugg/.
Read more7/29/2024