UGG: Unified Generative Grasping

0
Sign in to get full access
Overview
- The paper proposes a unified generative grasping (UGG) framework for generating diverse and stable grasps for a wide range of objects.
- UGG combines a novel neural network architecture with a multi-modal training dataset to enable efficient and versatile grasp generation.
- The framework is evaluated on several benchmark datasets and demonstrates state-of-the-art performance in terms of grasp quality and diversity.
Plain English Explanation
The paper presents a new approach called Unified Generative Grasping (UGG) that aims to make it easier for robots to pick up and manipulate a wide variety of objects. Traditionally, robot grasping systems have been designed for specific object types or shapes, which limits their flexibility.
The key idea behind UGG is to use a single, unified model that can generate diverse and stable grasps for a broad range of objects. The model is trained on a large, multi-modal dataset that includes information about object shapes, materials, and other relevant properties. This allows the system to learn general principles about good grasping strategies that can be applied to novel objects.
The authors introduce a new neural network architecture that takes in information about the object and the robot's hand, and outputs a set of potential grasping points and configurations. This generative approach means the system can produce a variety of grasp options, rather than just a single solution.
The researchers evaluate UGG on standard benchmark datasets and show that it outperforms previous state-of-the-art grasping systems in terms of the quality and diversity of the grasps it generates. This suggests the framework could be a powerful tool for enabling more flexible and capable robotic manipulation in real-world environments.
Technical Explanation
The paper introduces a Unified Generative Grasping (UGG) framework that aims to enable robots to grasp a wide variety of objects in a robust and versatile manner. Prior grasping approaches have often been tailored to specific object types or shapes, limiting their broader applicability.
The key innovation in UGG is the use of a single, unified neural network model that can generate diverse and stable grasps for a broad range of objects. The model is trained on a large, multi-modal dataset that captures information about object geometry, material properties, and other relevant features. This allows the system to learn general principles about effective grasping strategies that can then be applied to novel objects.
The UGG network architecture takes in data about the object and the robot's hand, and outputs a set of potential grasping points and configurations. This generative approach, in contrast to more traditional discriminative methods, enables the system to produce a diverse set of grasp options rather than just a single solution.
The researchers evaluate UGG on standard grasping benchmarks and demonstrate that it outperforms previous state-of-the-art methods in terms of grasp quality and diversity. This suggests the framework could be a valuable tool for enabling more flexible and capable robotic manipulation in real-world environments.
Critical Analysis
The UGG paper presents a promising approach for enabling more versatile and robust robotic grasping. The use of a unified, generative model is a novel and compelling idea that could help address the limitations of prior, more specialized grasping systems.
However, the paper does not extensively discuss the potential limitations or caveats of the UGG framework. For example, it is unclear how the system would perform on highly complex, cluttered scenes with many interacting objects, or how it would handle objects with very fine-grained or delicate features.
Additionally, while the paper demonstrates strong results on benchmark datasets, it would be valuable to see evaluations of the system in more realistic, real-world settings to better understand its practical applicability and limitations.
Further research could also explore ways to make the UGG framework even more flexible and adaptable, such as by incorporating online learning or few-shot adaptation capabilities to handle novel object types or changing environmental conditions.
Conclusion
The Unified Generative Grasping (UGG) framework presented in this paper represents an important step towards more versatile and capable robotic grasping and manipulation. By combining a novel neural network architecture with a multi-modal training dataset, the system can generate diverse and stable grasps for a wide range of objects.
The strong performance of UGG on benchmark tasks suggests it could be a valuable tool for enabling more flexible and dexterous robot interaction in real-world environments. Further research to address potential limitations and expand the framework's capabilities could help unlock even greater potential for this approach.
Overall, the UGG paper makes a compelling contribution to the field of robotic manipulation, highlighting the value of unified, generative models for tackling complex perception and control challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UGG: Unified Generative Grasping
Jiaxin Lu, Hao Kang, Haoxiang Li, Bo Liu, Yiding Yang, Qixing Huang, Gang Hua
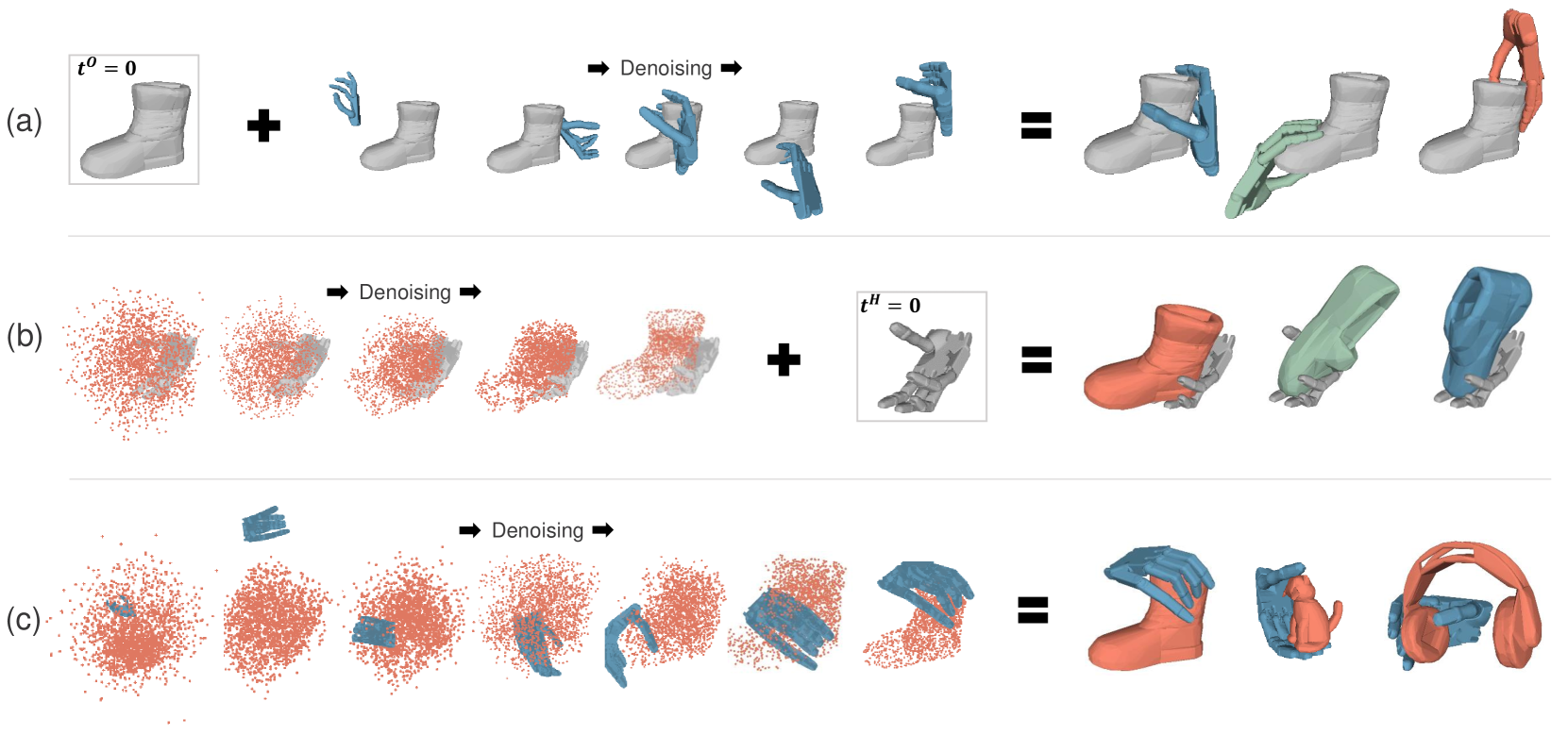
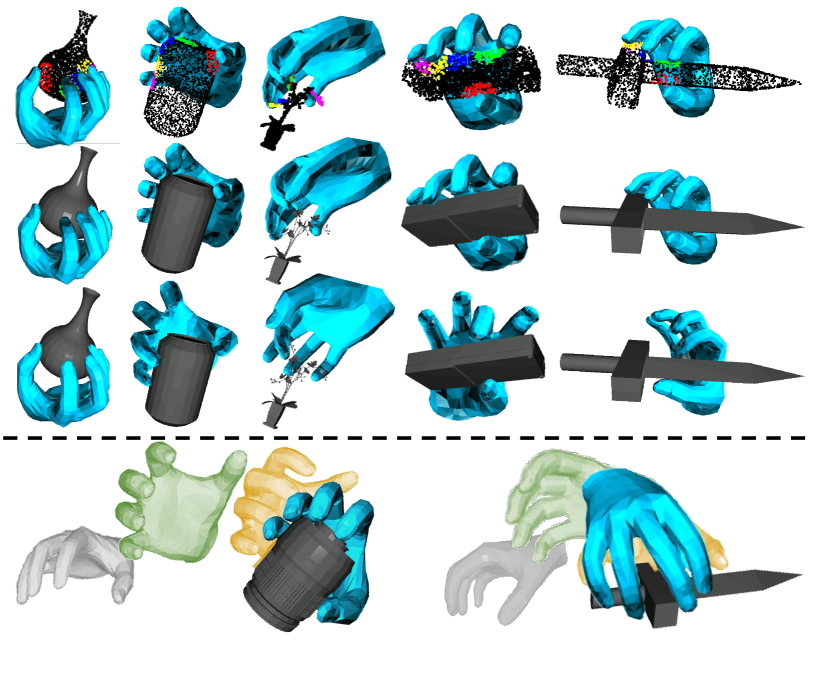
Dexterous grasping aims to produce diverse grasping postures with a high grasping success rate. Regression-based methods that directly predict grasping parameters given the object may achieve a high success rate but often lack diversity. Generation-based methods that generate grasping postures conditioned on the object can often produce diverse grasping, but they are insufficient for high grasping success due to lack of discriminative information. To mitigate, we introduce a unified diffusion-based dexterous grasp generation model, dubbed the name UGG, which operates within the object point cloud and hand parameter spaces. Our all-transformer architecture unifies the information from the object, the hand, and the contacts, introducing a novel representation of contact points for improved contact modeling. The flexibility and quality of our model enable the integration of a lightweight discriminator, benefiting from simulated discriminative data, which pushes for a high success rate while preserving high diversity. Beyond grasp generation, our model can also generate objects based on hand information, offering valuable insights into object design and studying how the generative model perceives objects. Our model achieves state-of-the-art dexterous grasping on the large-scale DexGraspNet dataset while facilitating human-centric object design, marking a significant advancement in dexterous grasping research. Our project page is https://jiaxin-lu.github.io/ugg/.
Read more7/29/2024
0
GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, Qian Liu
One goal of dexterous robotic grasping is to allow robots to handle objects with the same level of flexibility and adaptability as humans. However, it remains a challenging task to generate an optimal grasping strategy for dexterous hands, especially when it comes to delicate manipulation and accurate adjustment the desired grasping poses for objects of varying shapes and sizes. In this paper, we propose a novel dexterous grasp generation scheme called GrainGrasp that provides fine-grained contact guidance for each fingertip. In particular, we employ a generative model to predict separate contact maps for each fingertip on the object point cloud, effectively capturing the specifics of finger-object interactions. In addition, we develop a new dexterous grasping optimization algorithm that solely relies on the point cloud as input, eliminating the necessity for complete mesh information of the object. By leveraging the contact maps of different fingertips, the proposed optimization algorithm can generate precise and determinable strategies for human-like object grasping. Experimental results confirm the efficiency of the proposed scheme.
Read more5/17/2024

0
GraspXL: Generating Grasping Motions for Diverse Objects at Scale
Hui Zhang, Sammy Christen, Zicong Fan, Otmar Hilliges, Jie Song
Human hands possess the dexterity to interact with diverse objects such as grasping specific parts of the objects and/or approaching them from desired directions. More importantly, humans can grasp objects of any shape without object-specific skills. Recent works synthesize grasping motions following single objectives such as a desired approach heading direction or a grasping area. Moreover, they usually rely on expensive 3D hand-object data during training and inference, which limits their capability to synthesize grasping motions for unseen objects at scale. In this paper, we unify the generation of hand-object grasping motions across multiple motion objectives, diverse object shapes and dexterous hand morphologies in a policy learning framework GraspXL. The objectives are composed of the graspable area, heading direction during approach, wrist rotation, and hand position. Without requiring any 3D hand-object interaction data, our policy trained with 58 objects can robustly synthesize diverse grasping motions for more than 500k unseen objects with a success rate of 82.2%. At the same time, the policy adheres to objectives, which enables the generation of diverse grasps per object. Moreover, we show that our framework can be deployed to different dexterous hands and work with reconstructed or generated objects. We quantitatively and qualitatively evaluate our method to show the efficacy of our approach. Our model, code, and the large-scale generated motions are available at https://eth-ait.github.io/graspxl/.
Read more7/15/2024
⛏️
0
Dexterous Grasp Transformer
Guo-Hao Xu, Yi-Lin Wei, Dian Zheng, Xiao-Ming Wu, Wei-Shi Zheng
In this work, we propose a novel discriminative framework for dexterous grasp generation, named Dexterous Grasp TRansformer (DGTR), capable of predicting a diverse set of feasible grasp poses by processing the object point cloud with only one forward pass. We formulate dexterous grasp generation as a set prediction task and design a transformer-based grasping model for it. However, we identify that this set prediction paradigm encounters several optimization challenges in the field of dexterous grasping and results in restricted performance. To address these issues, we propose progressive strategies for both the training and testing phases. First, the dynamic-static matching training (DSMT) strategy is presented to enhance the optimization stability during the training phase. Second, we introduce the adversarial-balanced test-time adaptation (AB-TTA) with a pair of adversarial losses to improve grasping quality during the testing phase. Experimental results on the DexGraspNet dataset demonstrate the capability of DGTR to predict dexterous grasp poses with both high quality and diversity. Notably, while keeping high quality, the diversity of grasp poses predicted by DGTR significantly outperforms previous works in multiple metrics without any data pre-processing. Codes are available at https://github.com/iSEE-Laboratory/DGTR .
Read more4/30/2024