Grounding Multimodal Large Language Models in Actions

0

Sign in to get full access
Overview
- This paper explores how to ground multimodal large language models (LLMs) in actions, which involves integrating language models with embodied capabilities to enable them to perform physical tasks.
- The goal is to create LLMs that can understand and interact with the physical world, going beyond just language understanding and generation.
- The authors propose a novel approach called "grounding in actions" that aims to bridge the gap between language and embodied intelligence.
Plain English Explanation
The researchers are working on developing large language models (LLMs) that can do more than just process and generate text. They want these models to be able to interact with the physical world and perform real-world tasks, not just have conversations.
To do this, they are trying to "ground" the LLMs in actions, which means connecting the language understanding capabilities of the models to an understanding of how to physically interact with the environment. This could enable the models to follow instructions, manipulate objects, and carry out tasks in the real world, rather than just discussing them.
The goal is to create LLMs that can bridge the gap between language and embodied intelligence, allowing them to truly understand and engage with the physical world, not just the world of language. This could have many practical applications, from robotics and automation to assistive technologies and beyond.
Technical Explanation
The paper proposes a novel approach called "grounding in actions" to integrate large language models (LLMs) with embodied capabilities. The key idea is to train the LLMs not just on language data, but also on data that links language to physical actions and interactions.
This could involve training the models on datasets that pair language descriptions with demonstrations of corresponding physical actions, such as following step-by-step instructions to complete a task. By learning these connections between language and actions, the LLMs can develop a deeper, more grounded understanding of how language relates to the physical world.
The authors suggest that this grounded approach could enable LLMs to better understand and execute complex, multi-step tasks that require reasoning about the physical environment. It could also allow the models to learn common sense knowledge about the world that goes beyond just linguistic patterns.
The paper discusses various technical challenges and design choices involved in implementing this grounding in actions approach, such as model architectures, training regimes, and evaluation metrics. The authors also review relevant prior work in areas like embodied AI, language-guided control, and multi-modal learning.
Critical Analysis
The "grounding in actions" approach proposed in this paper represents an important step towards bridging the gap between language understanding and physical world interaction for large language models. Enabling LLMs to directly interface with the environment and carry out tasks could unlock transformative capabilities in areas like robotics, automation, and human-AI collaboration.
However, the authors acknowledge several significant challenges that need to be addressed. Acquiring high-quality datasets that link language to physical actions at scale is a major hurdle. Additionally, training LLMs to reliably and robustly transfer their language knowledge to embodied behaviors is an open research problem.
The paper also does not deeply explore the safety and ethical implications of imbuing powerful language models with the ability to directly manipulate the physical world. Careful consideration will be needed to ensure these capabilities are developed and deployed responsibly.
Further research is also needed to understand the generalization capabilities of grounded LLMs - can they flexibly apply their knowledge to novel situations, or will they be brittle and context-specific? Addressing this will be crucial for realizing the full potential of this approach.
Conclusion
Overall, this paper represents an important contribution to the emerging field of grounding multimodal large language models in the physical world. By bridging the gap between language and embodied intelligence, the authors aim to create more capable, versatile, and useful AI systems that can seamlessly interact with and assist humans in the real world.
While significant technical and ethical challenges remain, the "grounding in actions" approach holds tremendous promise. Continued advancements in this direction could pave the way for transformative breakthroughs in areas like robotics, automation, and human-AI collaboration. It is an exciting and important area of AI research to watch closely in the years to come.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Grounding Multimodal Large Language Models in Actions
Andrew Szot, Bogdan Mazoure, Harsh Agrawal, Devon Hjelm, Zsolt Kira, Alexander Toshev
Multimodal Large Language Models (MLLMs) have demonstrated a wide range of capabilities across many domains, including Embodied AI. In this work, we study how to best ground a MLLM into different embodiments and their associated action spaces, with the goal of leveraging the multimodal world knowledge of the MLLM. We first generalize a number of methods through a unified architecture and the lens of action space adaptors. For continuous actions, we show that a learned tokenization allows for sufficient modeling precision, yielding the best performance on downstream tasks. For discrete actions, we demonstrate that semantically aligning these actions with the native output token space of the MLLM leads to the strongest performance. We arrive at these lessons via a thorough study of seven action space adapters on five different environments, encompassing over 114 embodied tasks.
Read more6/13/2024

0
Temporal Grounding of Activities using Multimodal Large Language Models
Young Chol Song
Temporal grounding of activities, the identification of specific time intervals of actions within a larger event context, is a critical task in video understanding. Recent advancements in multimodal large language models (LLMs) offer new opportunities for enhancing temporal reasoning capabilities. In this paper, we evaluate the effectiveness of combining image-based and text-based large language models (LLMs) in a two-stage approach for temporal activity localization. We demonstrate that our method outperforms existing video-based LLMs. Furthermore, we explore the impact of instruction-tuning on a smaller multimodal LLM, showing that refining its ability to process action queries leads to more expressive and informative outputs, thereby enhancing its performance in identifying specific time intervals of activities. Our experimental results on the Charades-STA dataset highlight the potential of this approach in advancing the field of temporal activity localization and video understanding.
Read more7/9/2024
💬
0
Large Language Models as Generalizable Policies for Embodied Tasks
Andrew Szot, Max Schwarzer, Harsh Agrawal, Bogdan Mazoure, Walter Talbott, Katherine Metcalf, Natalie Mackraz, Devon Hjelm, Alexander Toshev
We show that large language models (LLMs) can be adapted to be generalizable policies for embodied visual tasks. Our approach, called Large LAnguage model Reinforcement Learning Policy (LLaRP), adapts a pre-trained frozen LLM to take as input text instructions and visual egocentric observations and output actions directly in the environment. Using reinforcement learning, we train LLaRP to see and act solely through environmental interactions. We show that LLaRP is robust to complex paraphrasings of task instructions and can generalize to new tasks that require novel optimal behavior. In particular, on 1,000 unseen tasks it achieves 42% success rate, 1.7x the success rate of other common learned baselines or zero-shot applications of LLMs. Finally, to aid the community in studying language conditioned, massively multi-task, embodied AI problems we release a novel benchmark, Language Rearrangement, consisting of 150,000 training and 1,000 testing tasks for language-conditioned rearrangement. Video examples of LLaRP in unseen Language Rearrangement instructions are at https://llm-rl.github.io.
Read more4/17/2024
0
The Revolution of Multimodal Large Language Models: A Survey
Davide Caffagni, Federico Cocchi, Luca Barsellotti, Nicholas Moratelli, Sara Sarto, Lorenzo Baraldi, Lorenzo Baraldi, Marcella Cornia, Rita Cucchiara
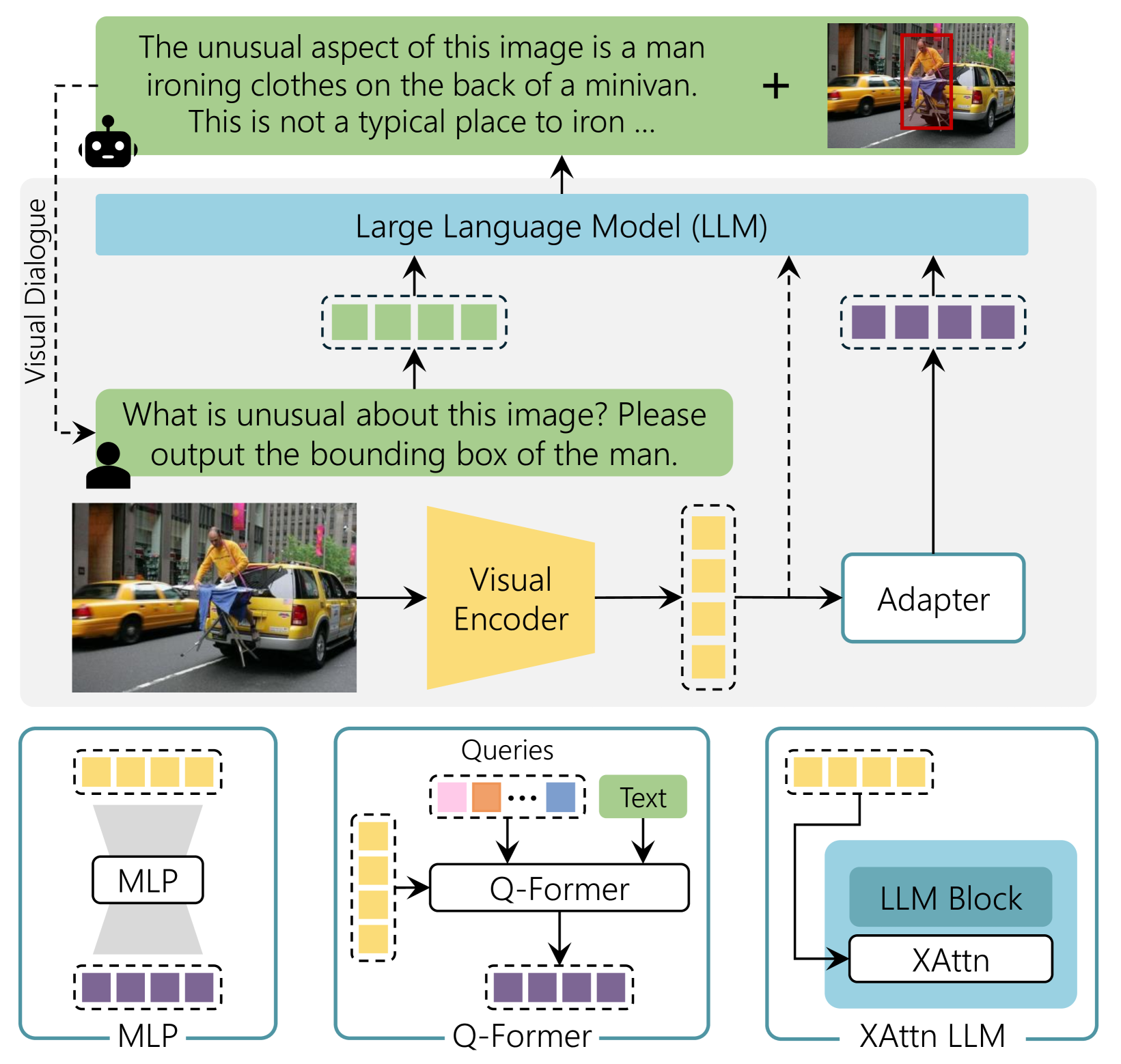
Connecting text and visual modalities plays an essential role in generative intelligence. For this reason, inspired by the success of large language models, significant research efforts are being devoted to the development of Multimodal Large Language Models (MLLMs). These models can seamlessly integrate visual and textual modalities, while providing a dialogue-based interface and instruction-following capabilities. In this paper, we provide a comprehensive review of recent visual-based MLLMs, analyzing their architectural choices, multimodal alignment strategies, and training techniques. We also conduct a detailed analysis of these models across a wide range of tasks, including visual grounding, image generation and editing, visual understanding, and domain-specific applications. Additionally, we compile and describe training datasets and evaluation benchmarks, conducting comparisons among existing models in terms of performance and computational requirements. Overall, this survey offers a comprehensive overview of the current state of the art, laying the groundwork for future MLLMs.
Read more6/7/2024