HAPFI: History-Aware Planning based on Fused Information

0

Sign in to get full access
Overview
- The paper presents HAPFI, a history-aware planning approach that fuses information from multiple sources to improve planning decisions.
- HAPFI aims to address limitations in traditional planning methods by incorporating past experiences and diverse data sources.
- Key aspects include history-aware reasoning, multi-modal sensor fusion, and an iterative planning approach.
Plain English Explanation
HAPFI is a new way of planning and decision-making that tries to be more aware of the past and use a variety of information sources. Traditional planning methods can be limited because they don't always consider what has happened before or use different kinds of data.
HAPFI's key ideas are:
- History-aware reasoning: It looks at past experiences and events to inform current planning, rather than just focusing on the present.
- Multi-modal sensor fusion: It combines information from multiple sensors and data sources, like cameras, GPS, and prior knowledge, to get a more complete picture.
- Iterative planning: It repeatedly updates its plan based on new information, rather than just making a single plan upfront.
By incorporating these elements, HAPFI aims to make better, more informed planning decisions compared to traditional approaches.
Technical Explanation
The paper introduces the HAPFI (History-Aware Planning based on Fused Information) framework, which combines history-aware reasoning, multi-modal sensor fusion, and iterative planning to improve decision-making.
HAPFI's history-aware reasoning component leverages past experiences and events to guide current planning. It maintains a history of actions, observations, and outcomes, and uses this context to reason about the best next steps.
The multi-modal sensor fusion aspect of HAPFI integrates diverse data sources, such as visual, audio, and GPS information, to build a more comprehensive understanding of the environment and task at hand.
HAPFI's iterative planning process repeatedly updates its plan based on new information gathered during execution. This allows the system to adapt to changes and refine its strategy over time, rather than relying on a single, static plan.
The authors evaluate HAPFI on a range of planning tasks and demonstrate its ability to outperform traditional planning approaches in terms of task completion, efficiency, and robustness.
Critical Analysis
The paper provides a comprehensive overview of the HAPFI framework and presents promising results. However, some potential limitations and areas for further research are worth noting:
- Scalability: The authors do not explicitly address how HAPFI would scale to more complex, real-world planning problems with a large number of variables and constraints.
- Interpretability: While the fusion of diverse information sources can improve planning, the decision-making process of HAPFI may be difficult to interpret, particularly for human-in-the-loop applications.
- Handling Uncertainty: The paper does not delve into how HAPFI deals with inherent uncertainty in sensor data and environmental dynamics, which is a critical aspect of practical planning systems.
Further research could explore these areas, as well as investigate the integration of HAPFI with other advanced planning techniques, such as reinforcement learning or hierarchical planning, to enhance its capabilities.
Conclusion
The HAPFI framework presents a novel approach to planning that leverages history-aware reasoning, multi-modal sensor fusion, and iterative planning to make more informed and adaptive decisions. By incorporating past experiences and diverse data sources, HAPFI aims to overcome limitations in traditional planning methods and improve performance in a range of applications.
While the paper demonstrates the potential of HAPFI, further research is needed to address scalability, interpretability, and uncertainty handling to enhance the framework's real-world applicability and impact.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HAPFI: History-Aware Planning based on Fused Information
Sujin Jeon, Suyeon Shin, Byoung-Tak Zhang
Embodied Instruction Following (EIF) is a task of planning a long sequence of sub-goals given high-level natural language instructions, such as Rinse a slice of lettuce and place on the white table next to the fork. To successfully execute these long-term horizon tasks, we argue that an agent must consider its past, i.e., historical data, when making decisions in each step. Nevertheless, recent approaches in EIF often neglects the knowledge from historical data and also do not effectively utilize information across the modalities. To this end, we propose History-Aware Planning based on Fused Information (HAPFI), effectively leveraging the historical data from diverse modalities that agents collect while interacting with the environment. Specifically, HAPFI integrates multiple modalities, including historical RGB observations, bounding boxes, sub-goals, and high-level instructions, by effectively fusing modalities via our Mutually Attentive Fusion method. Through experiments with diverse comparisons, we show that an agent utilizing historical multi-modal information surpasses all the compared methods that neglect the historical data in terms of action planning capability, enabling the generation of well-informed action plans for the next step. Moreover, we provided qualitative evidence highlighting the significance of leveraging historical multi-modal data, particularly in scenarios where the agent encounters intermediate failures, showcasing its robust re-planning capabilities.
Read more7/24/2024
👨🏫
0
Socratic Planner: Inquiry-Based Zero-Shot Planning for Embodied Instruction Following
Suyeon Shin, Sujin jeon, Junghyun Kim, Gi-Cheon Kang, Byoung-Tak Zhang
Embodied Instruction Following (EIF) is the task of executing natural language instructions by navigating and interacting with objects in 3D environments. One of the primary challenges in EIF is compositional task planning, which is often addressed with supervised or in-context learning with labeled data. To this end, we introduce the Socratic Planner, the first zero-shot planning method that infers without the need for any training data. Socratic Planner first decomposes the instructions into substructural information of the task through self-questioning and answering, translating it into a high-level plan, i.e., a sequence of subgoals. Subgoals are executed sequentially, with our visually grounded re-planning mechanism adjusting plans dynamically through a dense visual feedback. We also introduce an evaluation metric of high-level plans, RelaxedHLP, for a more comprehensive evaluation. Experiments demonstrate the effectiveness of the Socratic Planner, achieving competitive performance on both zero-shot and few-shot task planning in the ALFRED benchmark, particularly excelling in tasks requiring higher-dimensional inference. Additionally, a precise adjustments in the plan were achieved by incorporating environmental visual information.
Read more4/24/2024

0
Embodied Instruction Following in Unknown Environments
Zhenyu Wu, Ziwei Wang, Xiuwei Xu, Jiwen Lu, Haibin Yan
Enabling embodied agents to complete complex human instructions from natural language is crucial to autonomous systems in household services. Conventional methods can only accomplish human instructions in the known environment where all interactive objects are provided to the embodied agent, and directly deploying the existing approaches for the unknown environment usually generates infeasible plans that manipulate non-existing objects. On the contrary, we propose an embodied instruction following (EIF) method for complex tasks in the unknown environment, where the agent efficiently explores the unknown environment to generate feasible plans with existing objects to accomplish abstract instructions. Specifically, we build a hierarchical embodied instruction following framework including the high-level task planner and the low-level exploration controller with multimodal large language models. We then construct a semantic representation map of the scene with dynamic region attention to demonstrate the known visual clues, where the goal of task planning and scene exploration is aligned for human instruction. For the task planner, we generate the feasible step-by-step plans for human goal accomplishment according to the task completion process and the known visual clues. For the exploration controller, the optimal navigation or object interaction policy is predicted based on the generated step-wise plans and the known visual clues. The experimental results demonstrate that our method can achieve 45.09% success rate in 204 complex human instructions such as making breakfast and tidying rooms in large house-level scenes.
Read more6/18/2024
0
MFE-ETP: A Comprehensive Evaluation Benchmark for Multi-modal Foundation Models on Embodied Task Planning
Min Zhang, Jianye Hao, Xian Fu, Peilong Han, Hao Zhang, Lei Shi, Hongyao Tang, Yan Zheng
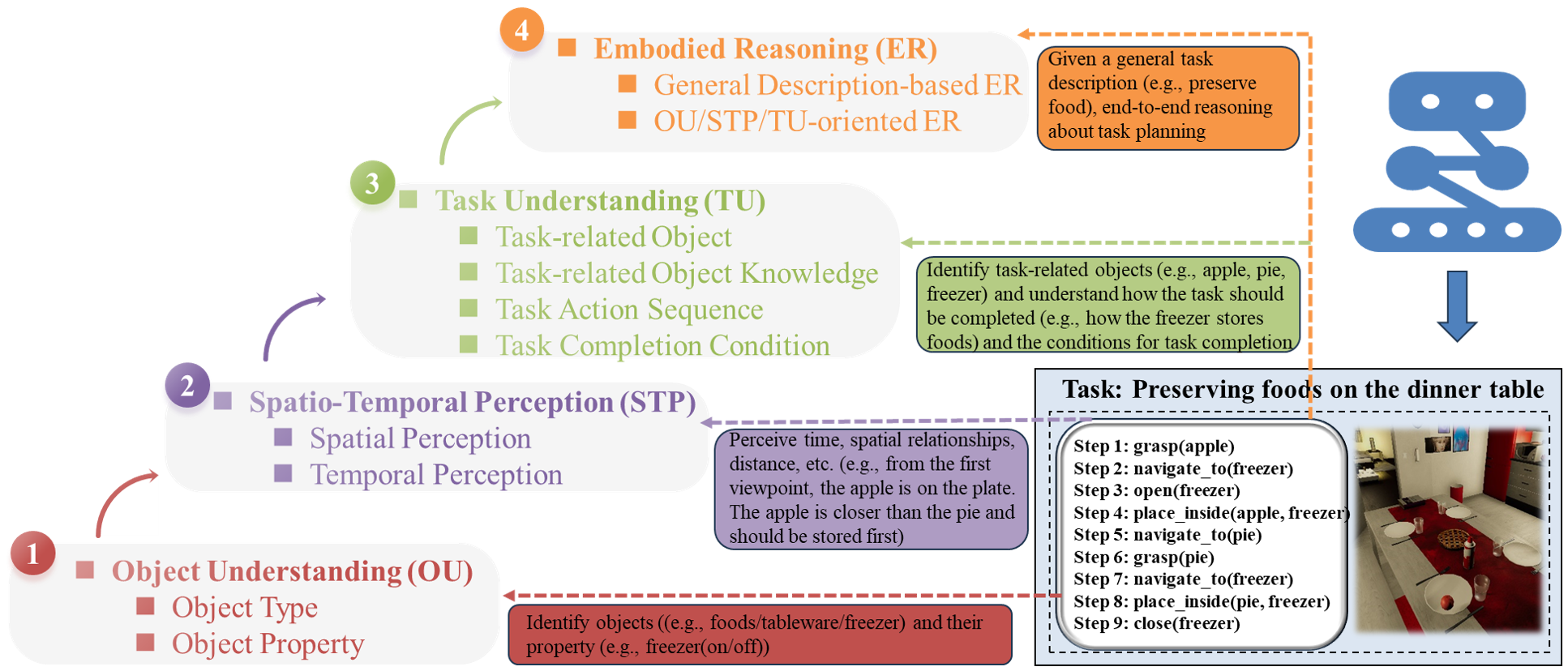
In recent years, Multi-modal Foundation Models (MFMs) and Embodied Artificial Intelligence (EAI) have been advancing side by side at an unprecedented pace. The integration of the two has garnered significant attention from the AI research community. In this work, we attempt to provide an in-depth and comprehensive evaluation of the performance of MFM s on embodied task planning, aiming to shed light on their capabilities and limitations in this domain. To this end, based on the characteristics of embodied task planning, we first develop a systematic evaluation framework, which encapsulates four crucial capabilities of MFMs: object understanding, spatio-temporal perception, task understanding, and embodied reasoning. Following this, we propose a new benchmark, named MFE-ETP, characterized its complex and variable task scenarios, typical yet diverse task types, task instances of varying difficulties, and rich test case types ranging from multiple embodied question answering to embodied task reasoning. Finally, we offer a simple and easy-to-use automatic evaluation platform that enables the automated testing of multiple MFMs on the proposed benchmark. Using the benchmark and evaluation platform, we evaluated several state-of-the-art MFMs and found that they significantly lag behind human-level performance. The MFE-ETP is a high-quality, large-scale, and challenging benchmark relevant to real-world tasks.
Read more7/31/2024