HARMONIC: Cognitive and Control Collaboration in Human-Robotic Teams

0

Sign in to get full access
Overview
- The paper discusses the HARMONIC framework, which aims to enable cognitive and control collaboration in human-robot teams.
- Key aspects include enabling shared understanding, flexible planning, and continuous execution of collaborative tasks.
- The research explores ways to build robots that can work seamlessly alongside humans.
Plain English Explanation
The HARMONIC framework is designed to help robots and humans work together more effectively. The goal is to create robots that can understand the goals and intentions of their human teammates, plan flexible responses, and continuously adjust their actions as a task progresses.
This allows the robot and human to collaborate more seamlessly and tackle complex challenges together. The researchers believe this type of close human-robot teamwork will be important as robots become more integrated into our daily lives and workplaces.
Technical Explanation
The HARMONIC framework consists of several key components:
-
Shared Understanding: Mechanisms for the robot to infer the human's goals, intentions, and mental state, and for the human to understand the robot's capabilities and decision-making.
-
Flexible Planning: A modular planning system that allows the robot to dynamically adjust its plans in response to changes in the task or the human's actions.
-
Continuous Execution: Techniques for the robot to continuously monitor the task progress and smoothly adapt its behavior in real-time.
The researchers evaluated HARMONIC in several human-robot collaboration experiments, demonstrating its ability to enable more fluid and effective teamwork compared to traditional approaches.
Critical Analysis
The paper provides a thorough technical description of the HARMONIC framework and its various components. However, some potential limitations are not addressed, such as the computational complexity of the planning algorithms or the reliance on accurate human intent recognition.
Additionally, the experiments were conducted in relatively controlled laboratory settings, so further research would be needed to assess the performance of HARMONIC in real-world, dynamic environments. Nonetheless, the overall approach represents an important step towards building robots that can seamlessly collaborate with humans.
Conclusion
The HARMONIC framework presents a promising approach for enabling cognitive and control collaboration between humans and robots. By focusing on shared understanding, flexible planning, and continuous execution, the researchers have developed techniques to facilitate more natural and effective teamwork. As robots become more prevalent in our daily lives, this type of human-robot collaboration will be essential for unlocking the full potential of these intelligent systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!HARMONIC: Cognitive and Control Collaboration in Human-Robotic Teams
Sanjay Oruganti, Sergei Nirenburg, Marjorie McShane, Jesse English, Michael K. Roberts, Christian Arndt
This paper presents a novel approach to multi-robot planning and collaboration. We demonstrate a cognitive strategy for robots in human-robot teams that incorporates metacognition, natural language communication, and explainability. The system is embodied using the HARMONIC architecture that flexibly integrates cognitive and control capabilities across the team. We evaluate our approach through simulation experiments involving a joint search task by a team of heterogeneous robots (a UGV and a drone) and a human. We detail the system's handling of complex, real-world scenarios, effective action coordination between robots with different capabilities, and natural human-robot communication. This work demonstrates that the robots' ability to reason about plans, goals, and attitudes, and to provide explanations for actions and decisions are essential prerequisites for realistic human-robot teaming.
Read more9/27/2024

0
New!HARMONIC: A Framework for Explanatory Cognitive Robots
Sanjay Oruganti, Sergei Nirenburg, Marjorie McShane, Jesse English, Michael K. Roberts, Christian Arndt
We present HARMONIC, a framework for implementing cognitive robots that transforms general-purpose robots into trusted teammates capable of complex decision-making, natural communication and human-level explanation. The framework supports interoperability between a strategic (cognitive) layer for high-level decision-making and a tactical (robot) layer for low-level control and execution. We describe the core features of the framework and our initial implementation, in which HARMONIC was deployed on a simulated UGV and drone involved in a multi-robot search and retrieval task.
Read more9/27/2024
0
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
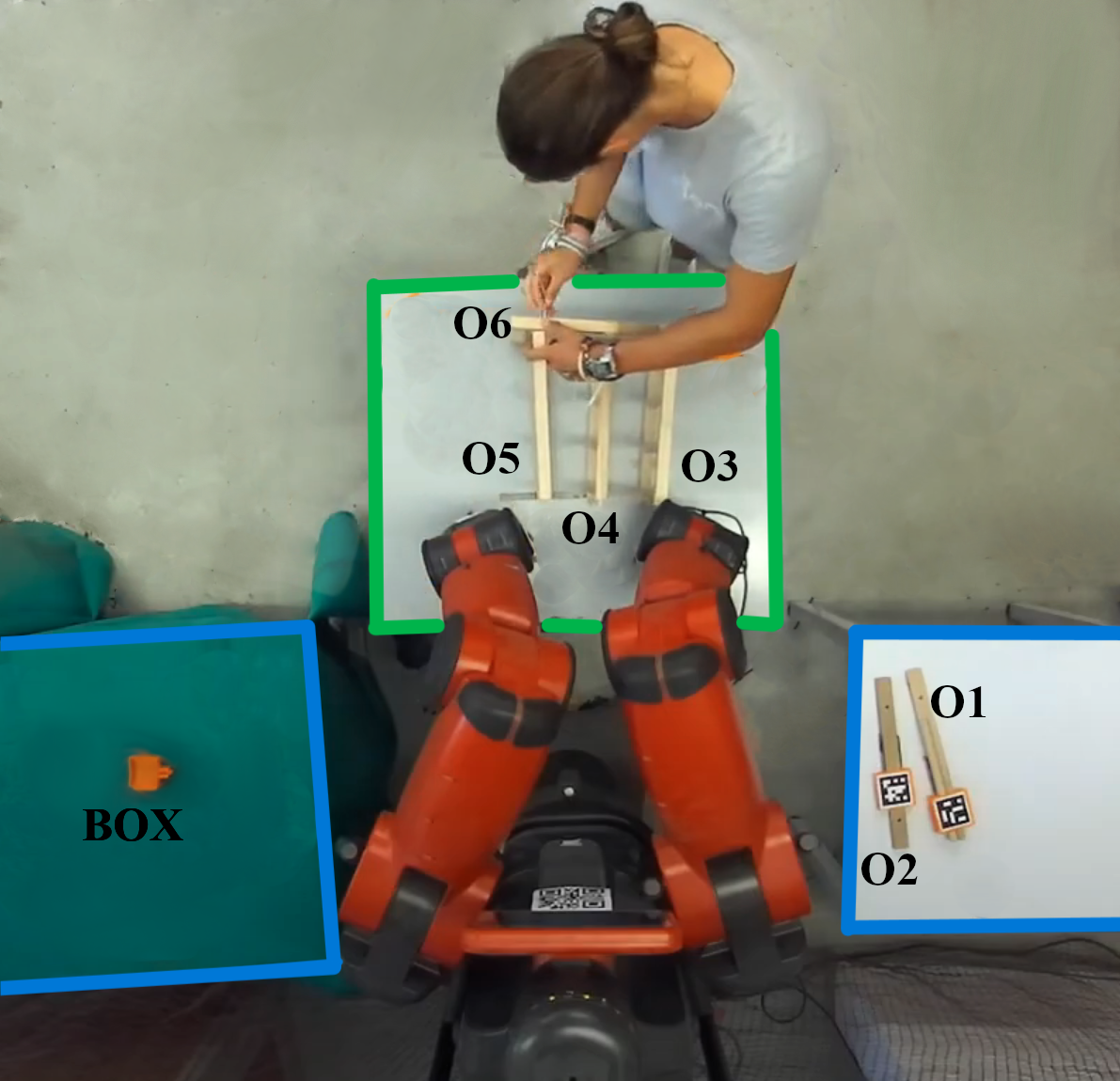
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
Read more6/10/2024

0
Designs for Enabling Collaboration in Human-Machine Teaming via Interactive and Explainable Systems
Rohan Paleja, Michael Munje, Kimberlee Chang, Reed Jensen, Matthew Gombolay
Collaborative robots and machine learning-based virtual agents are increasingly entering the human workspace with the aim of increasing productivity and enhancing safety. Despite this, we show in a ubiquitous experimental domain, Overcooked-AI, that state-of-the-art techniques for human-machine teaming (HMT), which rely on imitation or reinforcement learning, are brittle and result in a machine agent that aims to decouple the machine and human's actions to act independently rather than in a synergistic fashion. To remedy this deficiency, we develop HMT approaches that enable iterative, mixed-initiative team development allowing end-users to interactively reprogram interpretable AI teammates. Our 50-subject study provides several findings that we summarize into guidelines. While all approaches underperform a simple collaborative heuristic (a critical, negative result for learning-based methods), we find that white-box approaches supported by interactive modification can lead to significant team development, outperforming white-box approaches alone, and black-box approaches are easier to train and result in better HMT performance highlighting a tradeoff between explainability and interactivity versus ease-of-training. Together, these findings present three important directions: 1) Improving the ability to generate collaborative agents with white-box models, 2) Better learning methods to facilitate collaboration rather than individualized coordination, and 3) Mixed-initiative interfaces that enable users, who may vary in ability, to improve collaboration.
Read more6/10/2024