A Modular Framework for Flexible Planning in Human-Robot Collaboration

0
Sign in to get full access
Overview
- Presents a modular framework for flexible planning in human-robot collaboration
- Aims to enable seamless interaction and task coordination between humans and robots
- Incorporates uncertainty-aware human motion prediction and large language models for enhanced collaboration
Plain English Explanation
This paper describes a new framework that allows robots to work more effectively with humans. The key idea is to create a modular system that gives the robot more flexibility in how it plans and coordinates tasks with a human partner.
The framework incorporates two important capabilities: predicting how the human is likely to move and interact, and using large language models to better understand and communicate with the human. This helps the robot anticipate the human's actions and respond in a more natural, seamless way.
By integrating these advanced AI techniques, the framework aims to enhance the collaboration between humans and robots in tasks like manufacturing or assembly. The modular design also allows the system to be customized and adapted to different work environments and applications.
Technical Explanation
The paper presents a modular framework for flexible planning in human-robot collaboration. The framework consists of several key components:
-
An uncertainty-aware human motion prediction module that uses deep learning to forecast the human's future movements and actions.
-
A task planning module that leverages the human motion predictions to coordinate the robot's actions in real-time.
-
A large language model integration that allows the robot to better understand and communicate with the human collaborator using natural language.
-
A modular architecture that enables customization and adaptation to different human-robot collaboration scenarios.
The authors evaluate the framework in a series of user studies and manufacturing simulations, demonstrating its ability to enhance human-robot collaborative assembly and improve task performance compared to baseline approaches.
Critical Analysis
The paper presents a compelling approach to enabling more effective collaboration between humans and machines in the context of manufacturing and assembly tasks. The modular design and integration of advanced AI techniques like human motion prediction and language models are key strengths of the framework.
However, the paper does not address some potential limitations or areas for further research. For example, the framework's performance may be sensitive to the accuracy of the human motion predictions, and more work is needed to anticipate and adapt to changing collaboration dynamics over longer time horizons.
Additionally, the user studies and simulations provide initial validation, but more extensive real-world testing would be needed to fully assess the framework's robustness and generalizability to diverse human-robot collaboration scenarios.
Conclusion
This paper introduces a modular framework that aims to enhance the collaboration between humans and robots, particularly in manufacturing and assembly tasks. By incorporating advanced AI capabilities like uncertainty-aware human motion prediction and large language model integration, the framework enables more seamless and adaptive task coordination between the human and robot partners.
The modular design and demonstrated performance improvements suggest this framework could be a valuable contribution to the field of human-robot interaction, paving the way for more effective and intuitive collaboration between people and machines. Further research and real-world testing will be important to fully realize the potential of this approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
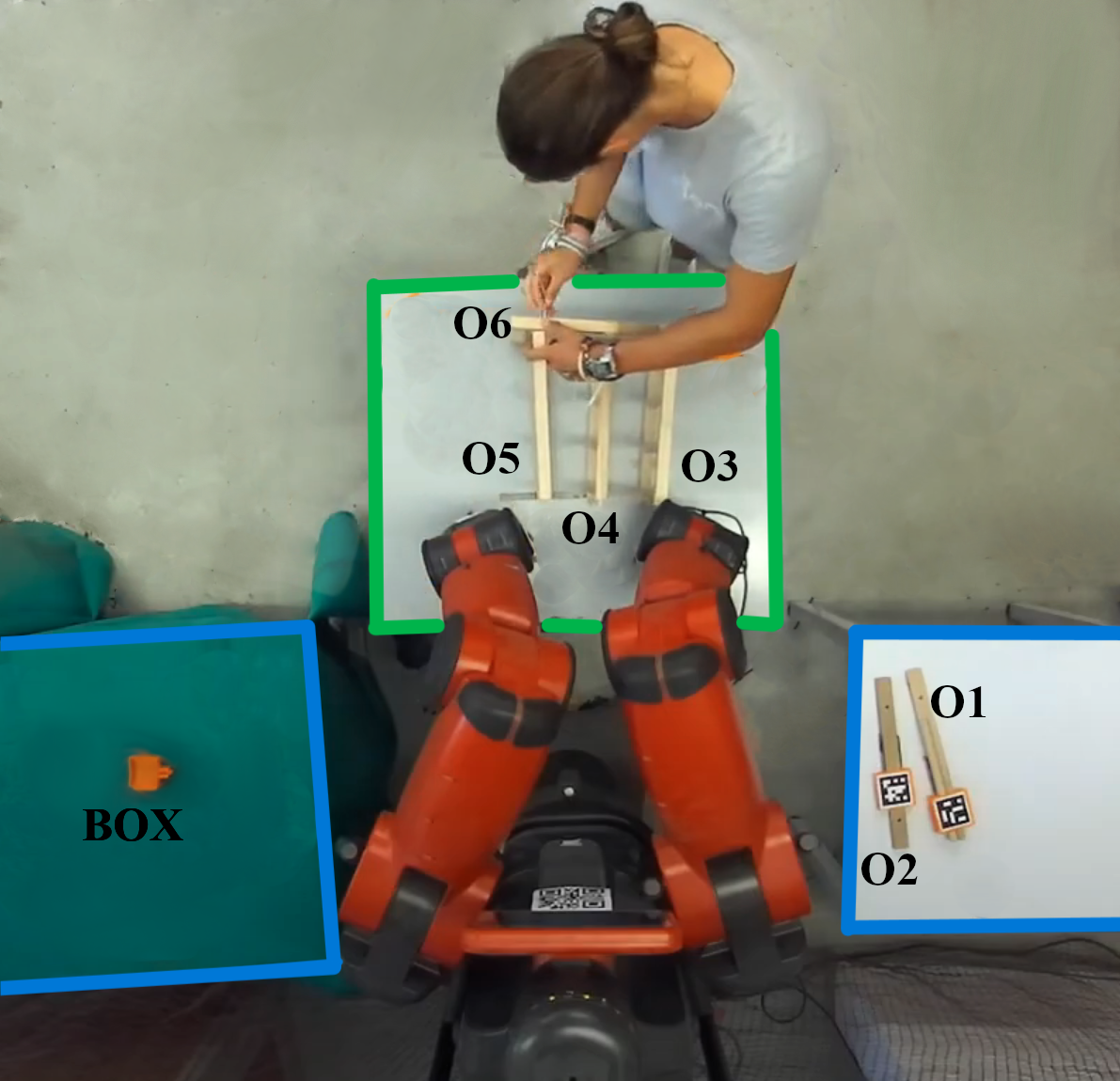
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
Read more6/10/2024

0
New!HARMONIC: Cognitive and Control Collaboration in Human-Robotic Teams
Sanjay Oruganti, Sergei Nirenburg, Marjorie McShane, Jesse English, Michael K. Roberts, Christian Arndt
This paper presents a novel approach to multi-robot planning and collaboration. We demonstrate a cognitive strategy for robots in human-robot teams that incorporates metacognition, natural language communication, and explainability. The system is embodied using the HARMONIC architecture that flexibly integrates cognitive and control capabilities across the team. We evaluate our approach through simulation experiments involving a joint search task by a team of heterogeneous robots (a UGV and a drone) and a human. We detail the system's handling of complex, real-world scenarios, effective action coordination between robots with different capabilities, and natural human-robot communication. This work demonstrates that the robots' ability to reason about plans, goals, and attitudes, and to provide explanations for actions and decisions are essential prerequisites for realistic human-robot teaming.
Read more9/27/2024
0
Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
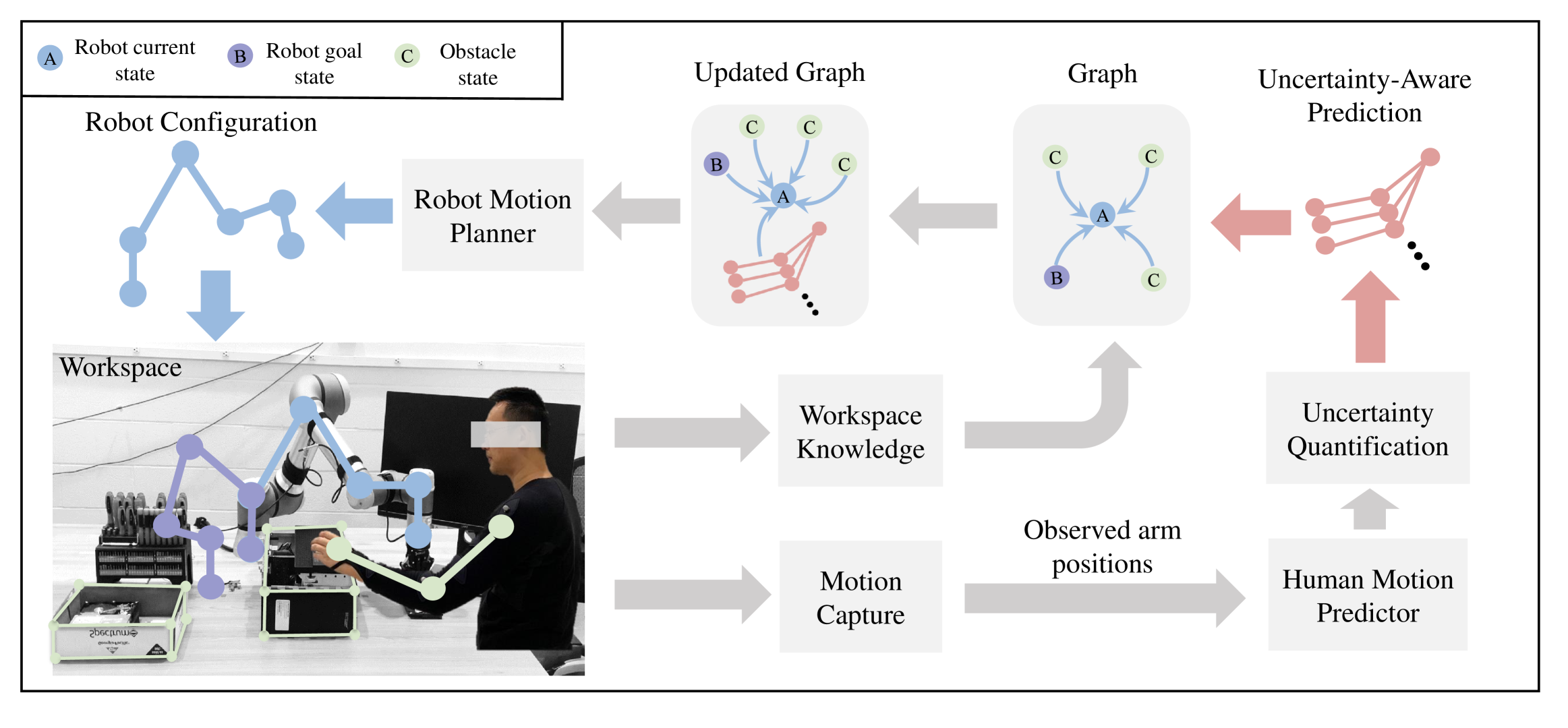
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
Read more5/17/2024
💬
0
Integrating Large Language Models with Multimodal Virtual Reality Interfaces to Support Collaborative Human-Robot Construction Work
Somin Park, Carol C. Menassa, Vineet R. Kamat
In the construction industry, where work environments are complex, unstructured and often dangerous, the implementation of Human-Robot Collaboration (HRC) is emerging as a promising advancement. This underlines the critical need for intuitive communication interfaces that enable construction workers to collaborate seamlessly with robotic assistants. This study introduces a conversational Virtual Reality (VR) interface integrating multimodal interaction to enhance intuitive communication between construction workers and robots. By integrating voice and controller inputs with the Robot Operating System (ROS), Building Information Modeling (BIM), and a game engine featuring a chat interface powered by a Large Language Model (LLM), the proposed system enables intuitive and precise interaction within a VR setting. Evaluated by twelve construction workers through a drywall installation case study, the proposed system demonstrated its low workload and high usability with succinct command inputs. The proposed multimodal interaction system suggests that such technological integration can substantially advance the integration of robotic assistants in the construction industry.
Read more4/5/2024