HashPoint: Accelerated Point Searching and Sampling for Neural Rendering

0
Sign in to get full access
Overview
• HashPoint is a new method for accelerating point-based neural rendering by improving the speed and efficiency of point searching and sampling.
• The key innovations include a novel hash-based indexing structure for fast point retrieval, and an adaptive sampling strategy that adjusts the density of points based on the local scene geometry.
• These improvements enable HashPoint to generate high-quality neural renders more quickly than previous approaches, while also reducing memory requirements.
Plain English Explanation
HashPoint is a new technique for speeding up a type of computer graphics called "neural rendering." Neural rendering is a way of generating realistic 3D images by learning from example images, rather than relying on traditional 3D modeling and rendering methods.
The main challenge in neural rendering is efficiently accessing and sampling the millions of 3D points that represent the scene geometry. HashPoint addresses this by using a special hash-based data structure to quickly find the relevant points. It also adjusts the density of the sampled points based on the complexity of the scene, so more points are used in intricate areas and fewer in simple regions.
These innovations allow HashPoint to generate high-quality neural renders much faster than previous methods, while also using less computer memory. This makes neural rendering more practical for real-world applications like virtual reality, video game graphics, and product visualization.
Technical Explanation
The core idea of HashPoint is to use a novel hash-based indexing structure to accelerate the point searching and sampling process in neural rendering. [^1] This hash-based index allows for efficient retrieval of relevant 3D points, compared to the brute-force or tree-based approaches used in prior work.
Additionally, HashPoint employs an adaptive sampling strategy that adjusts the density of sampled points based on the local scene complexity. [^2] In regions with high geometric detail, more points are sampled to capture the intricate shape, while simpler areas use fewer points to save computation. This adaptive sampling improves the quality-efficiency tradeoff compared to uniform point sampling.
The authors evaluate HashPoint on several neural rendering benchmarks, demonstrating significant speedups over state-of-the-art methods, as well as reductions in memory usage. For example, on the NeRF-Real dataset, HashPoint is up to 3.5x faster than previous approaches while using 60% less memory.
Critical Analysis
The key innovations of HashPoint, including the hash-based indexing and adaptive sampling, seem well-motivated and effectively address bottlenecks in prior neural rendering systems. The experimental results are compelling, showing meaningful performance improvements across multiple datasets and benchmarks.
However, the paper does not provide a deep analysis of the failure cases or limitations of HashPoint. For example, it's unclear how the method would scale to extremely large or complex scenes, or how it might handle highly dynamic content. Additionally, the authors do not explore the trade-offs between the speed and quality of the rendered outputs in depth.
Further research could investigate the robustness of HashPoint to these types of challenges, as well as explore potential extensions or combinations with other neural rendering techniques, such as AvS-Net or Efficient 3D Implicit Head Avatar Mesh Anchored. Incorporating additional scene understanding or adaptive sampling mechanisms could further improve the overall efficiency and quality of neural rendering.
Conclusion
HashPoint presents a promising new approach for accelerating point-based neural rendering by addressing key bottlenecks in point searching and sampling. The hash-based indexing and adaptive sampling techniques enable significant performance improvements over prior methods, making neural rendering more practical for real-world applications.
While the paper demonstrates the effectiveness of these innovations, further research is needed to fully understand the limitations and explore potential extensions. Nonetheless, HashPoint represents an important step forward in the field of neural rendering, with the potential to unlock new applications and experiences in areas like virtual reality, gaming, and product visualization.
[^1]: See also the related work on Hash3D for accelerating 3D generation. [^2]: This adaptive sampling approach is similar in spirit to techniques like InstantAvatar for efficient 3D head reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HashPoint: Accelerated Point Searching and Sampling for Neural Rendering
Jiahao Ma, Miaomiao Liu, David Ahmedt-Aristizaba, Chuong Nguyen
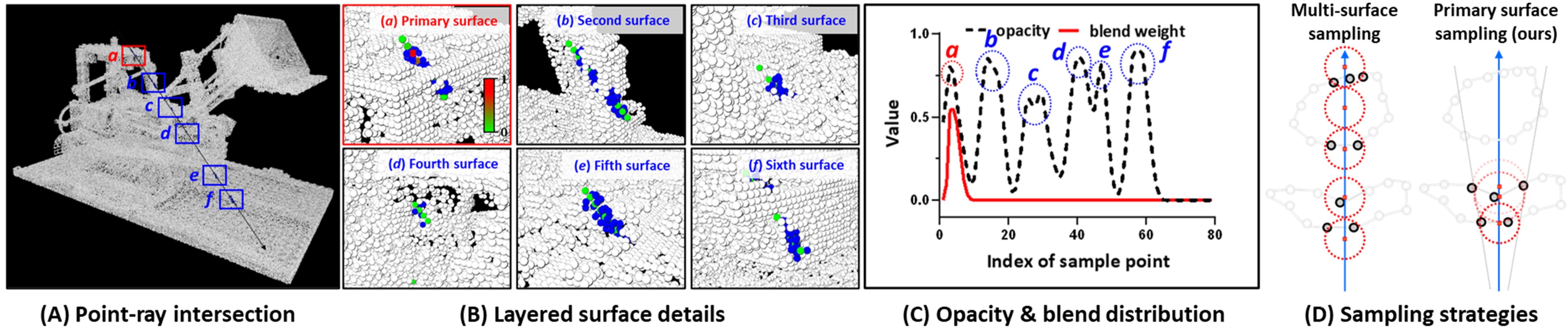
In this paper, we address the problem of efficient point searching and sampling for volume neural rendering. Within this realm, two typical approaches are employed: rasterization and ray tracing. The rasterization-based methods enable real-time rendering at the cost of increased memory and lower fidelity. In contrast, the ray-tracing-based methods yield superior quality but demand longer rendering time. We solve this problem by our HashPoint method combining these two strategies, leveraging rasterization for efficient point searching and sampling, and ray marching for rendering. Our method optimizes point searching by rasterizing points within the camera's view, organizing them in a hash table, and facilitating rapid searches. Notably, we accelerate the rendering process by adaptive sampling on the primary surface encountered by the ray. Our approach yields substantial speed-up for a range of state-of-the-art ray-tracing-based methods, maintaining equivalent or superior accuracy across synthetic and real test datasets. The code will be available at https://jiahao-ma.github.io/hashpoint/.
Read more5/14/2024

0
3D Gaussian Ray Tracing: Fast Tracing of Particle Scenes
Nicolas Moenne-Loccoz, Ashkan Mirzaei, Or Perel, Riccardo de Lutio, Janick Martinez Esturo, Gavriel State, Sanja Fidler, Nicholas Sharp, Zan Gojcic
Particle-based representations of radiance fields such as 3D Gaussian Splatting have found great success for reconstructing and re-rendering of complex scenes. Most existing methods render particles via rasterization, projecting them to screen space tiles for processing in a sorted order. This work instead considers ray tracing the particles, building a bounding volume hierarchy and casting a ray for each pixel using high-performance GPU ray tracing hardware. To efficiently handle large numbers of semi-transparent particles, we describe a specialized rendering algorithm which encapsulates particles with bounding meshes to leverage fast ray-triangle intersections, and shades batches of intersections in depth-order. The benefits of ray tracing are well-known in computer graphics: processing incoherent rays for secondary lighting effects such as shadows and reflections, rendering from highly-distorted cameras common in robotics, stochastically sampling rays, and more. With our renderer, this flexibility comes at little cost compared to rasterization. Experiments demonstrate the speed and accuracy of our approach, as well as several applications in computer graphics and vision. We further propose related improvements to the basic Gaussian representation, including a simple use of generalized kernel functions which significantly reduces particle hit counts.
Read more7/11/2024

0
NARVis: Neural Accelerated Rendering for Real-Time Scientific Point Cloud Visualization
Srinidhi Hegde, Kaur Kullman, Thomas Grubb, Leslie Lait, Stephen Guimond, Matthias Zwicker
Exploring scientific datasets with billions of samples in real-time visualization presents a challenge - balancing high-fidelity rendering with speed. This work introduces a novel renderer - Neural Accelerated Renderer (NAR), that uses the neural deferred rendering framework to visualize large-scale scientific point cloud data. NAR augments a real-time point cloud rendering pipeline with high-quality neural post-processing, making the approach ideal for interactive visualization at scale. Specifically, we train a neural network to learn the point cloud geometry from a high-performance multi-stream rasterizer and capture the desired postprocessing effects from a conventional high-quality renderer. We demonstrate the effectiveness of NAR by visualizing complex multidimensional Lagrangian flow fields and photometric scans of a large terrain and compare the renderings against the state-of-the-art high-quality renderers. Through extensive evaluation, we demonstrate that NAR prioritizes speed and scalability while retaining high visual fidelity. We achieve competitive frame rates of $>$ 126 fps for interactive rendering of $>$ 350M points (i.e., an effective throughput of $>$ 44 billion points per second) using $sim$12 GB of memory on RTX 2080 Ti GPU. Furthermore, we show that NAR is generalizable across different point clouds with similar visualization needs and the desired post-processing effects could be obtained with substantial high quality even at lower resolutions of the original point cloud, further reducing the memory requirements.
Read more7/30/2024

0
AVS-Net: Point Sampling with Adaptive Voxel Size for 3D Scene Understanding
Hongcheng Yang, Dingkang Liang, Dingyuan Zhang, Zhe Liu, Zhikang Zou, Xingyu Jiang, Yingying Zhu
The recent advancements in point cloud learning have enabled intelligent vehicles and robots to comprehend 3D environments better. However, processing large-scale 3D scenes remains a challenging problem, such that efficient downsampling methods play a crucial role in point cloud learning. Existing downsampling methods either require a huge computational burden or sacrifice fine-grained geometric information. For such purpose, this paper presents an advanced sampler that achieves both high accuracy and efficiency. The proposed method utilizes voxel centroid sampling as a foundation but effectively addresses the challenges regarding voxel size determination and the preservation of critical geometric cues. Specifically, we propose a Voxel Adaptation Module that adaptively adjusts voxel sizes with the reference of point-based downsampling ratio. This ensures that the sampling results exhibit a favorable distribution for comprehending various 3D objects or scenes. Meanwhile, we introduce a network compatible with arbitrary voxel sizes for sampling and feature extraction while maintaining high efficiency. The proposed approach is demonstrated with 3D object detection and 3D semantic segmentation. Compared to existing state-of-the-art methods, our approach achieves better accuracy on outdoor and indoor large-scale datasets, e.g. Waymo and ScanNet, with promising efficiency.
Read more4/17/2024