NARVis: Neural Accelerated Rendering for Real-Time Scientific Point Cloud Visualization

0

Sign in to get full access
Overview
- Describes a neural network-based approach called "NARVis" for real-time visualization of large scientific point cloud data
- Aims to accelerate the rendering performance of point cloud visualization compared to traditional methods
- Leverages deep learning to generate high-quality images from sparse point cloud data
Plain English Explanation
The paper presents a new technique called NARVis for visualizing large scientific point cloud data in real-time. Point clouds are 3D datasets represented as a collection of individual points, often used to model complex environments or objects.
Traditionally, rendering point cloud data for visualization can be computationally expensive, especially for very large datasets. NARVis addresses this challenge by using a neural network model to generate high-quality images from the sparse point cloud data. This neural network-based approach is able to produce visualizations much faster than traditional rendering methods, enabling real-time interaction and exploration of massive point cloud datasets.
The key idea is to train the neural network to learn the mapping between the input point cloud and the corresponding rendered image. Once trained, the network can then quickly generate new images from unseen point cloud data, without having to go through the full rendering process. This allows for smooth, responsive visualization of large-scale point cloud data, which is important for many scientific and engineering applications.
Technical Explanation
The NARVis system consists of two main components: a point cloud encoder network and an image decoder network. The encoder network takes the input point cloud data and learns a compact representation, which is then used by the decoder network to generate the final rendered image.
The encoder network uses a PointNet-based architecture to process the unstructured point cloud data. It learns to extract important features from the point cloud that capture the underlying geometry and appearance. The decoder network then takes this learned representation and generates the final high-quality image using a series of convolutional and upsampling layers.
The NARVis system is trained end-to-end using pairs of point cloud data and their corresponding ground truth rendered images. During inference, the trained model can quickly generate new images from unseen point cloud data, enabling real-time visualization and exploration.
Critical Analysis
The NARVis approach shows promising results for accelerating point cloud visualization, but there are a few potential limitations and areas for future research:
- The paper only evaluates NARVis on static point cloud datasets, and it's unclear how well the system would perform on dynamic or time-varying point clouds.
- The training process requires ground truth rendered images, which may not always be available, especially for large-scale point cloud datasets.
- The quality of the generated images, while high, may not match the fidelity of traditional rendering techniques in all cases, particularly for complex or high-frequency details.
Further research could explore ways to address these limitations, such as extending NARVis to handle dynamic point clouds, finding ways to reduce the reliance on ground truth data, or improving the image quality through more advanced neural network architectures or training techniques.
Conclusion
The NARVis system presents an innovative approach to accelerating the visualization of large-scale scientific point cloud data using deep learning. By leveraging neural networks to generate high-quality rendered images directly from the input point cloud, NARVis enables real-time interaction and exploration of massive 3D datasets, which can have significant implications for a wide range of scientific and engineering applications.
The research highlights the potential of deep learning techniques to solve challenging problems in scientific data visualization and opens up new avenues for further exploration and refinement of these methods.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
NARVis: Neural Accelerated Rendering for Real-Time Scientific Point Cloud Visualization
Srinidhi Hegde, Kaur Kullman, Thomas Grubb, Leslie Lait, Stephen Guimond, Matthias Zwicker
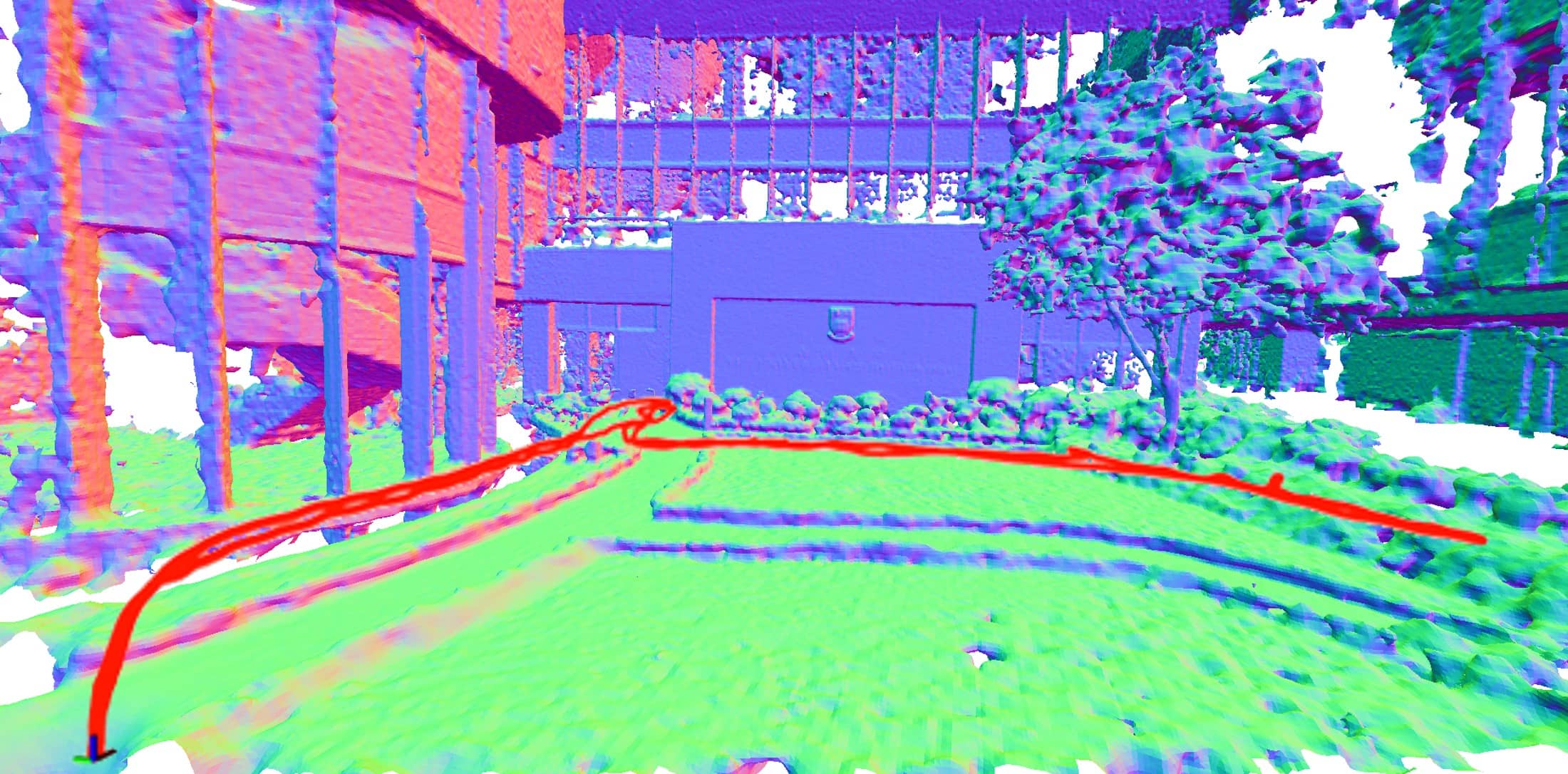
Exploring scientific datasets with billions of samples in real-time visualization presents a challenge - balancing high-fidelity rendering with speed. This work introduces a novel renderer - Neural Accelerated Renderer (NAR), that uses the neural deferred rendering framework to visualize large-scale scientific point cloud data. NAR augments a real-time point cloud rendering pipeline with high-quality neural post-processing, making the approach ideal for interactive visualization at scale. Specifically, we train a neural network to learn the point cloud geometry from a high-performance multi-stream rasterizer and capture the desired postprocessing effects from a conventional high-quality renderer. We demonstrate the effectiveness of NAR by visualizing complex multidimensional Lagrangian flow fields and photometric scans of a large terrain and compare the renderings against the state-of-the-art high-quality renderers. Through extensive evaluation, we demonstrate that NAR prioritizes speed and scalability while retaining high visual fidelity. We achieve competitive frame rates of $>$ 126 fps for interactive rendering of $>$ 350M points (i.e., an effective throughput of $>$ 44 billion points per second) using $sim$12 GB of memory on RTX 2080 Ti GPU. Furthermore, we show that NAR is generalizable across different point clouds with similar visualization needs and the desired post-processing effects could be obtained with substantial high quality even at lower resolutions of the original point cloud, further reducing the memory requirements.
Read more7/30/2024
🧠
0
Points2NeRF: Generating Neural Radiance Fields from 3D point cloud
Dominik Zimny, Joanna Waczy'nska, Tomasz Trzci'nski, Przemys{l}aw Spurek
Contemporary registration devices for 3D visual information, such as LIDARs and various depth cameras, capture data as 3D point clouds. In turn, such clouds are challenging to be processed due to their size and complexity. Existing methods address this problem by fitting a mesh to the point cloud and rendering it instead. This approach, however, leads to the reduced fidelity of the resulting visualization and misses color information of the objects crucial in computer graphics applications. In this work, we propose to mitigate this challenge by representing 3D objects as Neural Radiance Fields (NeRFs). We leverage a hypernetwork paradigm and train the model to take a 3D point cloud with the associated color values and return a NeRF network's weights that reconstruct 3D objects from input 2D images. Our method provides efficient 3D object representation and offers several advantages over the existing approaches, including the ability to condition NeRFs and improved generalization beyond objects seen in training. The latter we also confirmed in the results of our empirical evaluation.
Read more6/13/2024
0
Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems
Jianheng Liu, Chunran Zheng, Yunfei Wan, Bowen Wang, Yixi Cai, Fu Zhang
This paper presents a unified surface reconstruction and rendering framework for LiDAR-visual systems, integrating Neural Radiance Fields (NeRF) and Neural Distance Fields (NDF) to recover both appearance and structural information from posed images and point clouds. We address the structural visible gap between NeRF and NDF by utilizing a visible-aware occupancy map to classify space into the free, occupied, visible unknown, and background regions. This classification facilitates the recovery of a complete appearance and structure of the scene. We unify the training of the NDF and NeRF using a spatial-varying scale SDF-to-density transformation for levels of detail for both structure and appearance. The proposed method leverages the learned NDF for structure-aware NeRF training by an adaptive sphere tracing sampling strategy for accurate structure rendering. In return, NeRF further refines structural in recovering missing or fuzzy structures in the NDF. Extensive experiments demonstrate the superior quality and versatility of the proposed method across various scenarios. To benefit the community, the codes will be released at url{https://github.com/hku-mars/M2Mapping}.
Read more9/10/2024
0
HashPoint: Accelerated Point Searching and Sampling for Neural Rendering
Jiahao Ma, Miaomiao Liu, David Ahmedt-Aristizaba, Chuong Nguyen
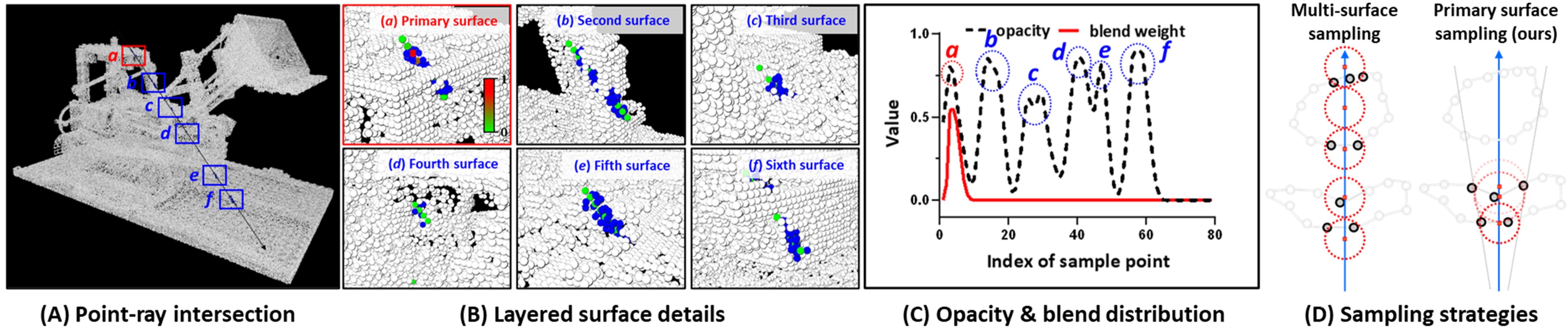
In this paper, we address the problem of efficient point searching and sampling for volume neural rendering. Within this realm, two typical approaches are employed: rasterization and ray tracing. The rasterization-based methods enable real-time rendering at the cost of increased memory and lower fidelity. In contrast, the ray-tracing-based methods yield superior quality but demand longer rendering time. We solve this problem by our HashPoint method combining these two strategies, leveraging rasterization for efficient point searching and sampling, and ray marching for rendering. Our method optimizes point searching by rasterizing points within the camera's view, organizing them in a hash table, and facilitating rapid searches. Notably, we accelerate the rendering process by adaptive sampling on the primary surface encountered by the ray. Our approach yields substantial speed-up for a range of state-of-the-art ray-tracing-based methods, maintaining equivalent or superior accuracy across synthetic and real test datasets. The code will be available at https://jiahao-ma.github.io/hashpoint/.
Read more5/14/2024