Hearing Touch: Audio-Visual Pretraining for Contact-Rich Manipulation

0
🚀
Sign in to get full access
Overview
- Current robot learning approaches focus on pretraining visual representations, but lack similar large-scale pretraining for other modalities like tactile sensing.
- The paper explores using contact microphones as an alternative tactile sensor, and leveraging large-scale audio-visual pretraining to boost the performance of robotic manipulation.
- This is the first approach to use large-scale multisensory pretraining for robotic manipulation tasks.
Plain English Explanation
Robots today are great at processing visual information, thanks to extensive pretraining on massive datasets of images and videos. However, when it comes to other senses like touch, robots often have to start from scratch.
The researchers in this paper found a clever way to get around this limitation. They used contact microphones - special sensors that can detect the vibrations and sounds made when an object is touched or manipulated. By linking these audio cues to the corresponding visual information, the researchers were able to leverage large datasets of audio and video to pretrain their robot's tactile perception.
In essence, the robot "learns" about touch by first understanding how different sounds and vibrations correspond to what it sees. This gives it a head start compared to starting from zero knowledge. The researchers show that this approach significantly improves the robot's ability to manipulate objects, even with limited hands-on training data.
This is an important step towards building more comprehensive multimodal perception in robots, allowing them to integrate visual, tactile, and other sensory cues to better understand and interact with the world around them.
Technical Explanation
The key insight of this paper is that contact microphones can capture audio-based information about touch and manipulation, which allows the researchers to leverage large-scale audio-visual pretraining to bootstrap the robot's tactile perception.
Specifically, the researchers use self-supervised pretraining on massive datasets of synchronized audio and video to learn general representations that capture the relationships between visual cues and the corresponding sounds and vibrations. They then fine-tune these pretrained models on smaller datasets of robot manipulation data to enable the robot to perform dexterous tasks.
The experiments show that this approach significantly outperforms training the robot's tactile perception from scratch, especially in low-data regimes common in robotics. The researchers demonstrate the effectiveness of their method on a range of robotic manipulation tasks, including object grasping and in-hand manipulation.
Critical Analysis
The paper makes a compelling case for the value of leveraging large-scale multimodal pretraining to enhance robotic perception and manipulation capabilities. However, the researchers acknowledge that the current approach is limited to a specific type of tactile sensor (contact microphones) and may not generalize as well to other tactile modalities.
Additionally, the paper does not explore the potential limitations or failure modes of this approach. For example, it is unclear how the system would handle noisy or ambiguous audio-visual cues, or how it would scale to more complex manipulation tasks that require more comprehensive multimodal integration.
Further research is needed to better understand the strengths and weaknesses of this approach, as well as to explore ways to make the multimodal pretraining more robust and adaptable to a wider range of robotic applications.
Conclusion
This paper presents an innovative approach to enhancing robotic manipulation capabilities by leveraging large-scale audio-visual pretraining to bootstrap the robot's tactile perception. By using contact microphones as a proxy for touch, the researchers demonstrate significant performance improvements on a variety of manipulation tasks, even with limited hands-on training data.
This work represents an important step towards building more comprehensive multimodal perception in robots, allowing them to better understand and interact with the world around them. As robots continue to play an increasingly important role in our lives, approaches like this that can enhance their sensory and manipulation capabilities will be crucial for unlocking their full potential.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🚀
0
Hearing Touch: Audio-Visual Pretraining for Contact-Rich Manipulation
Jared Mejia, Victoria Dean, Tess Hellebrekers, Abhinav Gupta
Although pre-training on a large amount of data is beneficial for robot learning, current paradigms only perform large-scale pretraining for visual representations, whereas representations for other modalities are trained from scratch. In contrast to the abundance of visual data, it is unclear what relevant internet-scale data may be used for pretraining other modalities such as tactile sensing. Such pretraining becomes increasingly crucial in the low-data regimes common in robotics applications. In this paper, we address this gap by using contact microphones as an alternative tactile sensor. Our key insight is that contact microphones capture inherently audio-based information, allowing us to leverage large-scale audio-visual pretraining to obtain representations that boost the performance of robotic manipulation. To the best of our knowledge, our method is the first approach leveraging large-scale multisensory pre-training for robotic manipulation. For supplementary information including videos of real robot experiments, please see https://sites.google.com/view/hearing-touch.
Read more5/15/2024
0
ManiWAV: Learning Robot Manipulation from In-the-Wild Audio-Visual Data
Zeyi Liu, Cheng Chi, Eric Cousineau, Naveen Kuppuswamy, Benjamin Burchfiel, Shuran Song
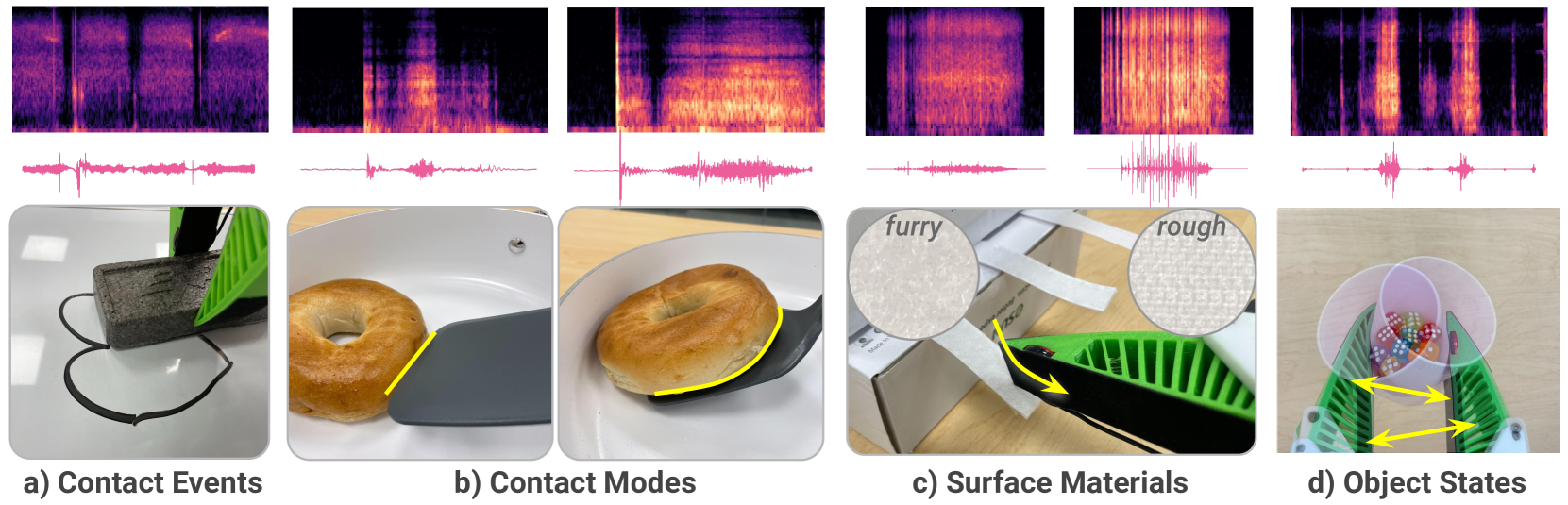
Audio signals provide rich information for the robot interaction and object properties through contact. These information can surprisingly ease the learning of contact-rich robot manipulation skills, especially when the visual information alone is ambiguous or incomplete. However, the usage of audio data in robot manipulation has been constrained to teleoperated demonstrations collected by either attaching a microphone to the robot or object, which significantly limits its usage in robot learning pipelines. In this work, we introduce ManiWAV: an 'ear-in-hand' data collection device to collect in-the-wild human demonstrations with synchronous audio and visual feedback, and a corresponding policy interface to learn robot manipulation policy directly from the demonstrations. We demonstrate the capabilities of our system through four contact-rich manipulation tasks that require either passively sensing the contact events and modes, or actively sensing the object surface materials and states. In addition, we show that our system can generalize to unseen in-the-wild environments, by learning from diverse in-the-wild human demonstrations. Project website: https://mani-wav.github.io/
Read more7/1/2024

0
Low Fidelity Visuo-Tactile Pretraining Improves Vision-Only Manipulation Performance
Selam Gano, Abraham George, Amir Barati Farimani
Tactile perception is a critical component of solving real-world manipulation tasks, but tactile sensors for manipulation have barriers to use such as fragility and cost. In this work, we engage a robust, low-cost tactile sensor, BeadSight, as an alternative to precise pre-calibrated sensors for a pretraining approach to manipulation. We show that tactile pretraining, even with a low-fidelity sensor as BeadSight, can improve an imitation learning agent's performance on complex manipulation tasks. We demonstrate this method against a baseline USB cable plugging task, previously achieved with a much higher precision GelSight sensor as the tactile input to pretraining. Our best BeadSight pretrained visuo-tactile agent completed the task with 70% accuracy compared to 85% for the best GelSight pretrained visuo-tactile agent, with vision-only inference for both.
Read more6/26/2024
🌿
0
MimicTouch: Leveraging Multi-modal Human Tactile Demonstrations for Contact-rich Manipulation
Kelin Yu, Yunhai Han, Qixian Wang, Vaibhav Saxena, Danfei Xu, Ye Zhao
Tactile sensing is critical to fine-grained, contact-rich manipulation tasks, such as insertion and assembly. Prior research has shown the possibility of learning tactile-guided policy from teleoperated demonstration data. However, to provide the demonstration, human users often rely on visual feedback to control the robot. This creates a gap between the sensing modality used for controlling the robot (visual) and the modality of interest (tactile). To bridge this gap, we introduce MimicTouch, a novel framework for learning policies directly from demonstrations provided by human users with their hands. The key innovations are i) a human tactile data collection system which collects multi-modal tactile dataset for learning human's tactile-guided control strategy, ii) an imitation learning-based framework for learning human's tactile-guided control strategy through such data, and iii) an online residual RL framework to bridge the embodiment gap between the human hand and the robot gripper. Through comprehensive experiments, we highlight the efficacy of utilizing human's tactile-guided control strategy to resolve contact-rich manipulation tasks. The project website is at https://sites.google.com/view/MimicTouch.
Read more9/6/2024